Навигация
1.2 Кинематический анализ
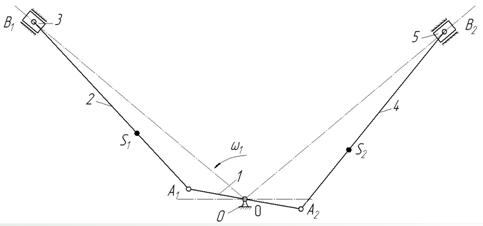
1.2.1 Определение положений и построение планов механизмов
Для построения планов механизма выберем масштабный коэффициент ml и вычисляем отрезки чертежа:




Радиусом, равным АВ, проводим окружность, а так как кривошип АВ имеет равномерное вращательное движение и совершает полный оборот, то делим окружность на двенадцать равных частей через каждые тридцать градусов. Каждое положение точки В обозначаем определённым номером. Для определения крайних положений (КПМ) производим следующие действия: обозначаем положения, в которых кривошип АВ и шатун ВС складываются и вытягиваются в одну линию.
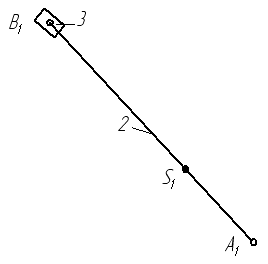
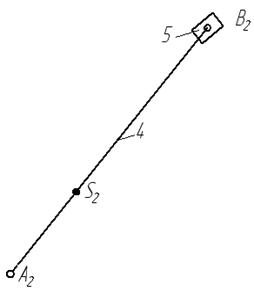
Построение планов механизма начинаем с положения точки В в одиннадцатой позиции. Положение точки В однозначно известно. Из точки В откладываем длину шатуна ВС. Полученную точку С соединим прямой линией с точкой В и определим тем самым положение шатуна в одиннадцатом положении. Далее определяем положение кривошипа CD. Из точки С откладываем отрезок, равный длине кривошипа CD – соединяем его со стойкой D, далее откладываем от точки C расстояние CE и из полученной точки откладываем величину кривошипа EF, до пересечения с прямой определяющей прямую по которой движется ползун, в полученной точке F этим самым определяем положение конечного звена (точка F) и в этой точке изображаем ползун в виде прямоугольника. Аналогично проводим действия и для других одиннадцати положений (КПМ).
1.2.2 Построение планов скоростей
Величина скорости точки В определяется по формуле:
|
Но так как изначально принимаем ![]() кр неизвестным, то вычисляем масштабный коэффициент для плана скоростей, соизмеримо с масштабным коэффициентом для плана положений (
кр неизвестным, то вычисляем масштабный коэффициент для плана скоростей, соизмеримо с масштабным коэффициентом для плана положений (![]() l=0,002 м/мм)
l=0,002 м/мм)
![]() V=0,001 м/(мм . с)
V=0,001 м/(мм . с)
Направление скорости точки В определяется в соответствии с направлением ![]() кр и перпендикулярно АВ.
кр и перпендикулярно АВ.
|
![]() C=
C=![]() B+
B+![]() CB
CB
![]() Здесь и в дальнейшем, вектор, известный по величине и по направлению подчёркиваем двумя линиями, а вектор, известный только по направлению только одной линией.
Здесь и в дальнейшем, вектор, известный по величине и по направлению подчёркиваем двумя линиями, а вектор, известный только по направлению только одной линией.
Для определения указанных неизвестных элементов строим план скоростей. Длину отрезка ab ( на плане скоростей все точки обозначаются малыми латинскими буквами) берём в два раза большим длины AB на плане положений ( в силу взаимосвязанности масштабных коэффициентов плана положений и плана скоростей и неизвестности угловой скорости кривошипа)
Этот отрезок (скорость VB) откладываем от произвольной точки Р (полюс плана скоростей) перпендикулярно АВ (на плане положений). Далее из полюса проводим луч, перпендикулярный кривошипу CD (в этом положении). Через точку b на плане скоростей проводим линию, перпендикулярную звену 3 на плане положений до пересечения с построенным лучом. На пересечении ставим точку c. Отрезок pc (вектор) изображает скорость VCточки C , а отрезок bc – скорость VCB. Значения действительных скоростей определяем по формулам:
![]()
![]()
Разделяем отрезок pc на плане скоростей точкой e, в том же соотношении в каком точка E разделяет кривошип CD на плане положений. Из полюса проводим луч параллельный направляющей ползуна, и из точки e проводим перпендикуляр к шатуну EF (на плане положений) до пересечения с построенным лучом, получаем точку f. Отрезок pd (вектор) изображает скорость VDточки D (она равна 0), а отрезок cd – скорость VDC (скорость движения точки C относительно D. Значения действительных скоростей определяем по формулам:
![]()
![]()
![]()
![]()
Подобным образом находим планы скоростей для всех двенадцати положений механизма. Плавная линия, соединяющая одноимённые точки на плане скоростей является годографом. Для точки b годографом является окружность, а для точки f вертикальная линия.
Составляем таблицу найденных значений отрезков плана скоростей:
Таблица 1
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | |
| Pb, мм | 80 | 80 | 80 | 80 | 80 | 80 | 80 | 80 | 80 | 80 | 80 | 80 |
| Pc, мм | 33 | 61 | 79 | 77 | 51 | 6 | 41 | 80 | 83 | 62 | 33 | 0 |
| Pe, мм | 22 | 41 | 55 | 52 | 35 | 3,5 | 33 | 56 | 57 | 44 | 22 | 0 |
| Pf, мм | 21 | 40 | 53 | 52 | 34,5 | 3,5 | 33,5 | 55 | 58 | 41 | 21 | 0 |
Похожие работы

... четвертого колеса к третьему; отношение модулей зубчатых колес первой ступени к второй. 3. Исследование качественных характеристик внешнего эвольвентного зацепления Зубчатые передачи являются наиболее распространенным видом механических передач. В зависимости от условий эксплуатации при проектировании зубчатых передач учитываются различные факторы, влияющие на повышение их прочности, ...
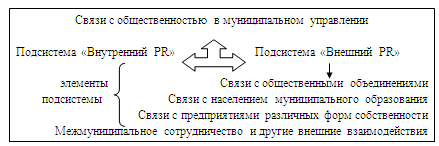
... Республики Татарстан, изучим данные исследований проведенных пресс-службами муниципальных образований республики. 2.2 Анализ учета общественного мнения, деятельности пресс-служб и применение PR-технологий в муниципальных образованиях Республики Татарстан При анализе и написании теоретической части выпускной квалификационной работы, автором, был сделан вывод, что население может принимать ...
... так. Свыше тысячи исследований в течение последних 30 лет подтверждают причинную связь между медианасилием и агрессивным поведением некоторых подростков. Глава 2. Изучение влияния СМК на проявление преступного поведения среди несовершеннолетних подростков 2.1 Психолого-педагогические особенности подросткового возраста Переходный период, как лакмусовая бумага, проявляет все пороки общества ...
... обеспечению развития экономики, а с другой - осуществлению гарантий прав человека в сфере труда. В лаборатории производятся исследования зависимости прочности клеевых соединений от технологических параметров склеивания при изготовлении верхней одежды. При исследовании используются электромеханическое оборудование. По степени опасности поражения людей электрическим током в окружающей среде, ...
0 комментариев