Навигация
Параметры и характеристики двигателя
15529
знаков
0
таблиц
11
изображений
2.1.2 Параметры и характеристики двигателя
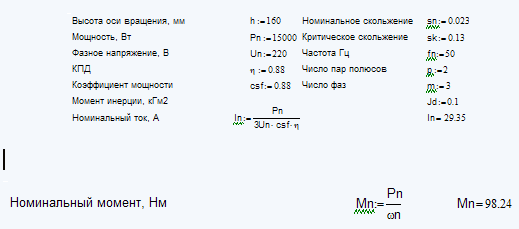
С учетом необходимого запаса мощности выбираем четырехполюсный асинхронный двигатель 4A160S4 со следующими параметрами:
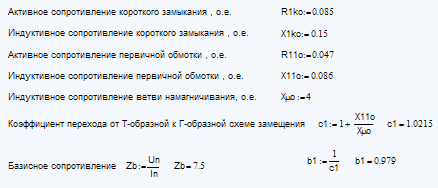
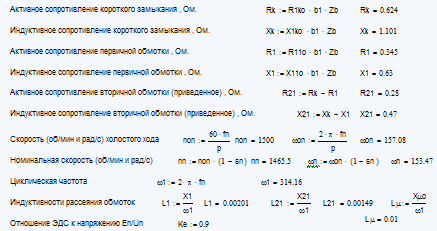
2.1.3 Параметры Г-образной схемы замещения
Параметры Т-образной схемы замещения.
Т – образная схема замещения трехфазной (m1=3) асинхронной машины строится для одной фазы, и, по существу, аналогична схеме замещения трансформатора (рис. 1).
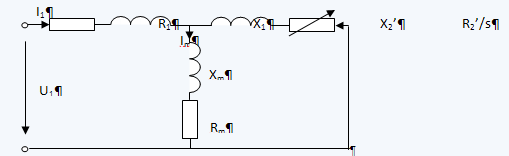
Рис. 1 Схема замещения асинхронной машины
Здесь: U1 - фазное напряжение, В;
R1 и R2’ – активные сопротивления первичной и вторичной обмоток;
X1 = ω1.L1σ и X2’ = ω1.L2’σ – индуктивные сопротивления рассеяния первичной и вторичной обмоток, где ω1 = 2.π.f1 – циклическая частота сети, а f1 – частота сети;
Xm и Rm – индуктивное сопротивление намагничивающей ветви, обусловленное основным магнитным потоком, и активное сопротивление, искусственно вносимое в схему замещения для учета магнитных потерь в ферромагнитных частях магнитопровода;
I1, I2’ – фазные токи в обмотках статора и ротора;
Im- ток намагничивания, создающий основной магнитный поток Фm;
Здесь индекс «штрих» (‘), относящийся ко вторичной обмотке, обозначает, что данная величина приведена к первичной обмотке.
2.2 Выбор автоматического воздушного выключателя
Силовые выключатели служат для распределения электроэнергии в низковольтных установках в качестве аппаратов защиты питающих линий и потребителей. Они защищают от перегрузки и короткого замыкания установки, двигатели, генераторы и трансформаторы. Предназначены для коммутации и защиты установок, двигателей, трансформаторов и конденсаторов.
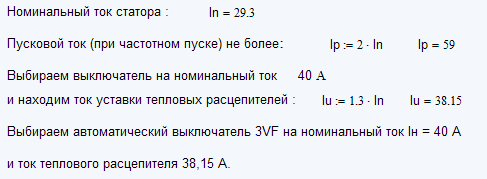
Выбор автоматического воздушного выключателя осуществляется по номинальному току двигателя.
Для этой цели могут быть использованы трехфазные силовые автоматические выключатели серии 3VF фирмы SIMENS. Ток уставки теплового расцепителя устанавливается на 30% больше номинального тока двигателя Iu = 1.3 In
2.3 Выбор преобразователя частоты
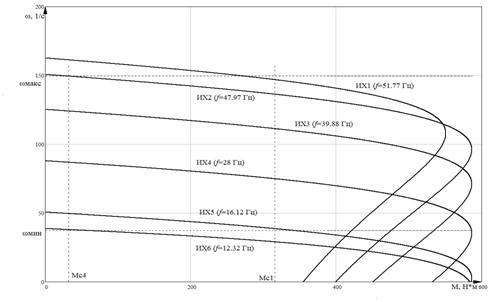
Частотный способ регулирования является наиболее перспективным и широко используемым в настоящее время способом регулирования скорости АД. Принцип его заключается в том, что изменяя частоту питающего напряжения f1, можно, в соответствии с выражением ω0 = 2..f1/p, изменять угловую скорость вращения магнитного поля (синхронную скорость вращения ротора), получая тем самым различные искусственные характеристики.
Этот способ обеспечивает плавное регулирование в широком диапазоне, получаемые характеристики обладают высокой жесткостью. Электрические потери в роторе, связанные со скольжением, в этом случае невелики, поэтому частотный способ наиболее экономичен
3. Расчет механических характеристик
3.1 Параметры механических характеристик
Все механические характеристики двигателя строятся совместно с механической нагрузочной характеристикой механизма, приведенной к валу двигателя.
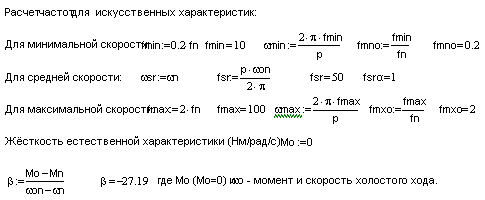
Вначале находим жесткость естественной механической характеристики двигателя
![]() ,
,
где Mo и о – момент и скорость холостого хода, а Mn и n – момент и скорость при номинальной нагрузке.
3.2 Естественная характеристика
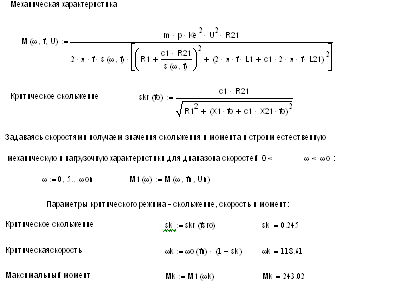
Для построения естественной механической характеристики(рис.5) используем формулу для момента асинхронной машины М(), в которой явно показана зависимость момента от частоты (f) и напряжения (U):
![]()
Здесь: s (,0) = 1 - /0 – скольжение; - текущее значение угловой скорости; 0 =2f/p– угловая скорость магнитного поля при данной частоте f; р – число пар полюсов; m – число фаз, для трехфазного двигателя m =3; U – текущее значение фазного напряжения; R1 и R2’ – активные сопротивления, а L1 и L2’ – индуктивности первичной и вторичной (приведенной к первичной) обмоток.
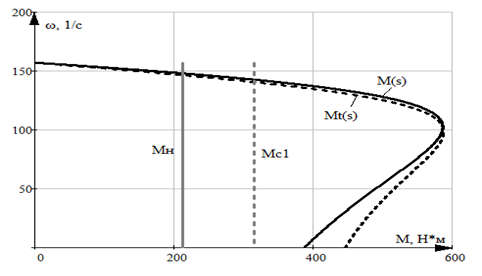
С помощью формулы для момента асинхронной машины строим естественную механическую характеристику привода для номинальных значений напряжения и частоты. На этом же графике строится нагрузочная характеристика механизма.

Определив параметры естественной механической характеристики строим график зависимости моментов от угловых скоростей:
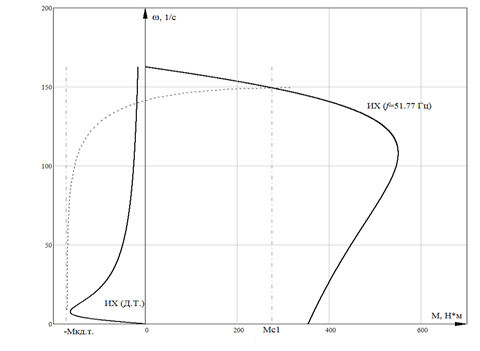
3.3 Механическая характеристика при экстренном торможении
Экстренное торможение осуществляется в режиме динамического торможения, при котором в обмотку статора - например на зажимы А и ВС, соединенные вместе, подается постоянный ток. Предварительно необходимо задаться кратностью тока динамического торможения Idt по отношению к номинальномуКid = Idt/ In, которую выбирают в интервале 1.8 – 2.2 ( например Кid = 2) и рассчитать величину тормозного тока, величину эквивалентного тока Ie и добавочного сопротивления

Похожие работы
... 11. РАЗРАБОТКА ПРИНЦИПИАЛЬНОЙ ЭЛЕКТРИЧЕСКОЙ СХЕМЫ ЭЛЕКТРОПРИВОДА, ОПИСАНИЕ ЕЁ РАБОТЫ Принципиальная электрическая схема электропривода приведена в графической части Описание схемы Схема представляет собой систему управления привода по схеме «Тиристорный преобразователь частоты – Асинхронный двигатель с короткозамкнутым ротором». Преобразователь частоты питается от сети напряжением 380 В. ...





... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...





... . Целью дипломного проекта является разработка и исследование автоматической системы регулирования (АСР) асинхронного высоковольтного электропривода на базе автономного инвертора тока с трехфазным однообмоточным двигателем с детальной разработкой программы высокого уровня при различных законах управления. В ходе конкретизации из поставленной цели выделены следующие задачи. Провести анализ ...
... b = a(t2) + g(t2) = w0× t + g 2. ТЕХНИЧЕСКОЕ ЗАДАНИЕ 2.1 Наименование и область применения Разрабатываемое устройство называется: автоматическая система управления асинхронным двигателем. Область применения разрабатываемого устройства не ограничивается горнодобывающей промышленностью и может использоваться на любых предприятиях для управления машинами с асинхронным приводом. 2.2 Основание для ...
0 комментариев