Навигация
Оценка необходимости применения обратной связи по скорости
15529
знаков
0
таблиц
11
изображений
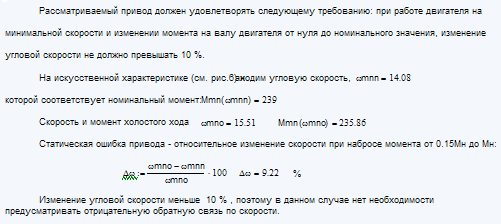
4. Оценка необходимости применения обратной связи по скорости
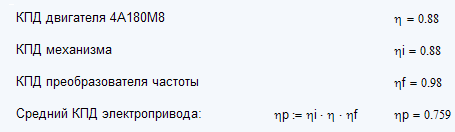
5. Определение среднего КПД системы
Средний КПД электропривода определяется как произведение КПД двигателя, преобразователя частоты и исполнительного механизма: ср = д.пч.m.
6.Переходные процессы в электроприводе
Анализ переходных процессов выполняется с помощью программы Matlab. В среде Matlab собрали модель (рис.9), задали требуемые параметры(рис.10) ее элементов и выполнить расчет переходного процесса для случая частотного пуска ненагруженного двигателя с последующим 100% увеличением нагрузки.
Блок Step осуществляет скачкообразный наброс нагрузки по окончании пуска.
Широтно-импульсный преобразователь вырабатывает переменную частоту, при частоте треугольной волны модуляции обычно выбираемой в диапазоне 1500-3000 Гц.
Амплитуда напряжения задается блоками Relay A, Relay B и Relay С, и равна 220√2.
Связь блоков Simulink и PSB осуществляется через управляемые источники напряжения Controlled Voltage Source Vao, Vbo и Vco.
Основной особенностью данной модели является возможность наблюдать работу асинхронного короткозамкнутого двигателя от преобразователя частоты, который изменяет одновременно как напряжение, так и частоту, в соответствии с заданными законами.
Изменение напряжения и частоты в функции времени задается блоками Fcn и Fcn1, соответственно. На их входы подается время, а выходы определяют напряжение и частоту (в относительных единицах), подводимые к двигателю.
Обычно несколько лучшие результаты (с точки зрения сокращения времени пуска при допустимых бросках тока и момента) получаются, если скорость возрастания напряжения немного больше скорости возрастания частоты.
Зависимости напряжения v(t) и частоты f(t) (в о.е.) от времени t при пуске могут быть приняты линейными c ограничениями ( которые реализуются с помощью блоков saturation)
v(u) = kv.u; f(u) = kf.u, при ограничениях v(u) <1 и f(u) <1,
экспоненциальными с одной постоянной времени Т
v(u) = f(u) = 1- .exp(-.u/T),
или экспоненциальными с двумя (близкими по величине) постоянными времени Т1 и Т2 (Т1>Т2),
что при правильном выборе постоянных времени Т1 и Т2 дает, при несколько увеличенном времени пуска, минимальные броски тока и момента.
Здесь во всех формулах вместо времени t подставлена u – стандартная входная переменная блока Fcn. Экспоненциальный характер изменения v(t) и f(t) для Т=0.2 (экран Scope v*,f*) показан на рис.11. Одновременно на экране Scope Vabm можно видеть характер изменения напряжения, приложенного к статорной обмотке двигателя во время пуска (рис.12).
Промоделируем систему без наброса нагрузки чтобы оценить параметры переходного процесса по скорости(рис 15):
Установившася скорость ωуст=157,5
Время 1го согласования t1=0.59c
Время переходного процесса τр=1,03с
Перерегулирование ![]()
Изменяя параметры модели, проследим их влияние пусковые параметры, такие как время пуска и пусковые броски тока и момента.
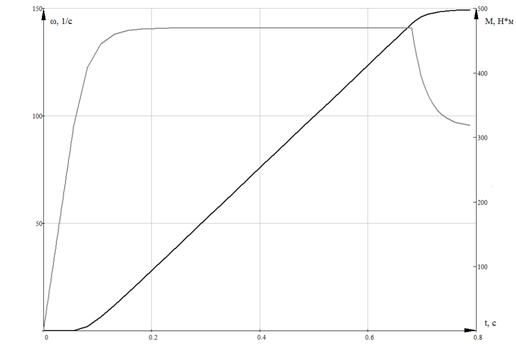
Увеличив в полтора раза момент нагрузки и момент инерции, моделируя тем самым незапланированный наброс дополнительной нагрузки на вал двигателя проследим переходные процессы скорости ω(t) и момента Te(t), а также графики токов статора is(t) и ротора ir(t) при частотном пуске(рис16, 17).
Из графиков(рис16, 17) видно, что повышение момента инерции и величины нагрузки негативно влияют на пульсацию, и амплитуду роторных и статорных токов, а так же увеличивает время переходных процессов. Однако выбранный двигатель справляется с нагрузкой. Таким образом можно считать допустимым не продолжительное увеличение нагрузки. Так как амплитуда тока превышает ток теплового расцепления автомата, длительная работа в данном режиме не предусмотрена.
Обычно несколько лучшие результаты (с точки зрения сокращения времени пуска при допустимых бросках тока и момента) получаются, если скорость возрастания напряжения немного больше скорости возрастания частоты. По этому в исходной модели увеличим скорость изменения напряжения на 50%(рис.18, 19, 20) и проанализируем основные параметры пуска(рис.21, 22)
Промоделируем систему без наброса нагрузки чтобы оценить параметры переходного процесса по скорости(рис 23):
Установившася скорость ωуст=157,5
Время 1го согласования t1=0.43c
Время переходного процесса τр=1,04с
Перерегулирование ![]()
Таким образом при увеличении скорости изменения напряжения мы значительно уменьшаем время первого согласования по скорости и время пусковых токов статора и ротора. Следовательно мы можем уменьшить время наброса нагрузки с 1 до 0,6с. При этом значение перерегулирования по скорости не превышает 20%, а величина пусковых токов не превышает номинальные, что положительно сказывается на эксплуатационных характеристиках двигателя.
Вывод
Мы приобрели навыки для решения инженерных задач по расчету и проектированию систем автоматизированного электропривода в статических и динамических режимах, а так же навыков расчета параметров в программном пакете Mathcad и моделирования в программном пакете Matlab Simulink системы электропривода «преобразователь частоты-асинхронный двигатель».
В ходе разработки электропривода мы достигли диапазона регулирования скорости от 30 до 300 рад/с.
В процессе моделирования при разных параметрах системы мы проследили переходные процессы и дали им характеристику. Мы так же сделали следующие выводы:
· Повышение момента инерции и величины нагрузки негативно влияют на пульсацию, и амплитуду роторных и статорных токов, а так же увеличивает время переходных процессов. Однако выбранный двигатель справляется с нагрузкой. Таким образом можно считать допустимым не продолжительное увеличение нагрузки. Так как амплитуда тока превышает ток теплового расцепления автомата, длительная работа в данном режиме не предусмотрена.
· При увеличении скорости изменения напряжения мы значительно уменьшаем время первого согласования по скорости и время пусковых токов статора и ротора. Следовательно мы можем уменьшить время наброса нагрузки с 1 до 0,6с. При этом значение перерегулирования по скорости не превышает 20%, а величина пусковых токов не превышает номинальные, что положительно сказывается на эксплуатационных характеристиках двигателя.
Для достижения минимального времени пуска нужно увеличивать скорость изменения частоты и напряжения и уменьшить момент инерции. При этом необходимо следить за пульсацией и амплитудами токов статора и ротора.
Список литературы
1. Методические указания к курсовому проекту «Электропривод по схеме преобразователь частоты - асинхронный двигатель»
2. Конспект лекций по курсу «Элементы и системы автоматизированного управления»
3. Методические указания к лабораторным работам по курсу «Элементы и системы автоматизированного управления»
Похожие работы
... 11. РАЗРАБОТКА ПРИНЦИПИАЛЬНОЙ ЭЛЕКТРИЧЕСКОЙ СХЕМЫ ЭЛЕКТРОПРИВОДА, ОПИСАНИЕ ЕЁ РАБОТЫ Принципиальная электрическая схема электропривода приведена в графической части Описание схемы Схема представляет собой систему управления привода по схеме «Тиристорный преобразователь частоты – Асинхронный двигатель с короткозамкнутым ротором». Преобразователь частоты питается от сети напряжением 380 В. ...





... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...





... . Целью дипломного проекта является разработка и исследование автоматической системы регулирования (АСР) асинхронного высоковольтного электропривода на базе автономного инвертора тока с трехфазным однообмоточным двигателем с детальной разработкой программы высокого уровня при различных законах управления. В ходе конкретизации из поставленной цели выделены следующие задачи. Провести анализ ...
... b = a(t2) + g(t2) = w0× t + g 2. ТЕХНИЧЕСКОЕ ЗАДАНИЕ 2.1 Наименование и область применения Разрабатываемое устройство называется: автоматическая система управления асинхронным двигателем. Область применения разрабатываемого устройства не ограничивается горнодобывающей промышленностью и может использоваться на любых предприятиях для управления машинами с асинхронным приводом. 2.2 Основание для ...
0 комментариев