Навигация
Разработка системы управления механизмом зажигания
67510
знаков
8
таблиц
5
изображений
2. Разработка системы управления механизмом зажигания
2.1 Постановка задачи
Одной из проблем двигателя внутреннего сгорания является запаздывание момента зажигания при увеличении частоты вращения коленвала, т.к. скорость преодоления поршнем верхней мертвой точки возрастает вместе с оборотами двигателя, а время сгорания топлива остается неизменным. Это приводит к значительной потере мощности двигателя, повышенному расходу топлива и существенному ограничению максимальных оборотов двигателя.
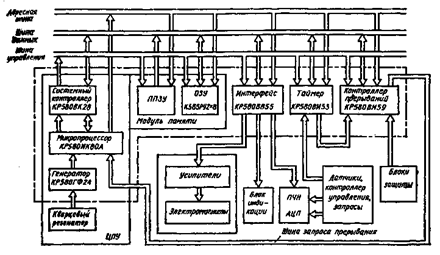
Для нормализации работы двигателя необходимо применение механизма, изменяющего момент зажигания в зависимости от оборотов двигателя, т.е. опережение момента при увеличении оборотов. В основном это достигается применением механических устройств рис. 2.1, принцип действия которых основан на изменении положения грузиков под воздействием центробежной силы. Недостатками таких механизмов являются нестабильная работа (особенно на низких оборотах) и невозможность достижения нужного угла опережения зажигания на высоких оборотах.

Рисунок 2.1 Механическая система опережения зажигания.
Избавиться от этих недостатков позволяет применение электронного механизма опережения зажигания. За основу этого механизма берется датчик, считывающий обороты распредвала и подающий сигнальные импульсы на устройство управления моментом зажигания.
К устройству управления предъявляются следующие требования:
1. прием сигнала от датчика;
2. преобразование сигнала в зависимости от оборотов двигателя (распредвала);
3. возможность изменять значение угла опережения зажигания.
4. сохранение работоспособности при воздействии высоких температур.
5. устойчивость к воздействию вибраций.
Оптимальным решением в данном случае является построение устройства управления моментом зажигания на микроконтроллере, так как преобразование сигналов датчика обеспечивается программно, что дает возможность регулировки. Термостойкость достигается применением микроконтроллера соответствующего уровня (с индексом). Устойчивость к вибрациям обеспечивается высокой степенью интеграции и малой массой радиоэлементов.
2.2 Разработка структурной схемы
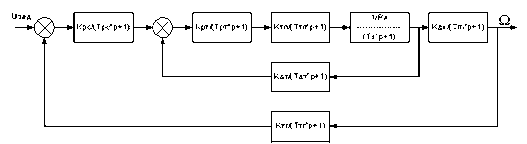
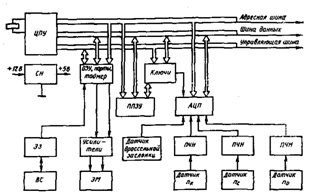
Для определения частоты вращения двигателя, как уже говорилось, необходима установка специального датчика, на основе которого будет строиться вся схема устройства рис. 2.2. Следующий элемент механизма – электронная система смещения импульса, основанная на микроконтроллере. Микроконтроллер принимает сигнал от датчика, обрабатывает его с помощью программы, записанной в его ПЗУ, и передает уже обработанный сигнал на выход. Так как микроконтроллер не в состоянии работать с высокими токами, в систему вносится ключевая схема.
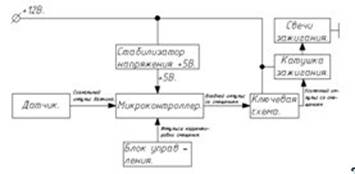
Рисунок 2.2 Структурная схема устройства.
Так же необходимым шагом является включение в схему устройства стабилизатора напряжения. Он нужен для преобразования напряжения бортовой сети транспортного средства +12В в напряжение, приемлемое для питания микроконтроллера, и гашения его скачков.
Блок управления включается для регулировки и точной настройки программы микроконтроллера под конкретный двигатель, корректировки момента искрообразования и угла опережения зажигания.
Катушка зажигания предназначена для преобразования 12 вольтового входного импульса со смещением в усиленный импульс со смещением амплитудой до 15000В. Такое высокое напряжение обеспечивает образование стабильного дугового разряда на контактах свечи зажигания.
2.3 Разработка принципиальной схемы
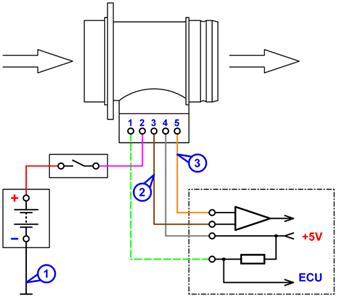
Датчик Холла это индукционный датчик, действующий на основе эффекта Холла. Он применяется в бесконтактных системах зажигания автомобильного типа. Построение системы на основе этого датчика является оптимальным решением, так как он адаптирован для работы с двигателями внутреннего сгорания. Для работы датчика Холла на распредвал устанавливается стальной экран (диск) рис. 2.3, имеющий два выреза, по 120 градусов каждый. Датчик устанавливается так, чтобы диск вращался в его проеме.
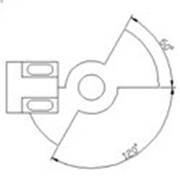
Рисунок 2.3 Экран датчика Холла и расположение датчика относительно экрана.
Датчик имеет три вывода: питание +12В. (красный), земля (черный) и сигнальный провод (зеленый). При входе шторки в проем датчика, он вырабатывает прямоугольный импульс с амплитудой от 9 до 12В (рис. 2.4). При выходе шторки, амплитуда резко падает до минимального значения – не более 0,4В. Сигналом для искрообразования служит окончание импульса.
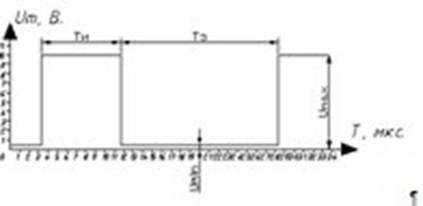
Рисунок 2.4 – Временная диаграмма датчика Холла.
Параметры вырабатываемых датчиком импульсов:
Ти = Тз / 2 (2.1)где Ти – длительность импульса,
Тз – длительность задержки импульса.
U max = 9 – 12В. (2.2)
где U max – максимальная амплитуда импульса.
U min = 0 – 0,4В. (2.3)
где U min минимальная амплитуда импульса.
В автомобильных системах зажигания с датчиком Холла работает коммутатор, выполняющий роль ключевой схемы. Плюсами применения коммутатора являются: наличие встроенной схемы питания датчика Холла, подача выходного импульса только при изменении входного, формирование выходного импульса, позволяющего максимально реализовать потенциал катушки зажигания.
Необходимыми частями устройства являются цепи, согласующие микроконтроллер с остальными элементами схемы.
Принципиальная схема системы управления механизмом зажигания приведена в чертеже ДП.230101.802.287.Э3.
Питание микроконтроллера обеспечивает цепь, состоящая из элементов VD1 (снижение уровня пульсаций), C2 и C3 (отфильтровывание несглаженных пульсаций), микросхемой DA1 КР142ЕН5А (преобразование 12В входного напряжения в 5В выходного).
RCцепь, состоящая из элементов R1, R3 и C1 снижает напряжение выходного сигнала датчика Холла (9 – 12В) до приемлемых микроконтроллером 5В.
К выводам микроконтроллера OSC1 и OSC2 подключается резонатор ZQ1, предназначенный для определения программой микроконтроллера временных интервалов сигналов датчика Холла.
Транзистор VT1 работает в ключевом режиме. Он предназначен для усиления выходного импульса микроконтроллера до уровня, приемлемого коммутатором. Оптимальным вариантом является применение высокочастотного маломощного транзистора, например КТ3117А. Резистор R4 предназначены для формирования тока базы транзистора VT1.
Ключи S1 – S5 нужны для подачи сигналов на входы микроконтроллера RB4 – RB7. Данные сигналы предназначены для корректировки переменных программы микроконтроллера.
Похожие работы
... значений выходных переменных по требуемому закону. В каждой из этих задач управляющей системе требуется сформировать выходное воздействие, реализация которого компенсирует образовавшуюся ошибку управления. 1 Техническое задание Разработать систему управления механизмом передвижения тележки мостового крюкового крана (мехатронного объекта) с техническими характеристиками: Вариант ...

... Вести учет выполненных работ; · Сохранение информации в базе данных для выбранного клиента; · Печать отчетов о проделанной работе и найденных неисправностях. Диагностический комплекс Мотор-Тестер МТ10 позволяет осуществлять мониторинг следующих параметров: Контролируемые параметры Диапазон Осциллографический канал 1: входное напряжение: ±200 В входное сопротивление: 240 кОм ...
... трапа (но не менее 600 мм); для вертикальных трапов—600 мм. Между площадками и трапами нельзя делать порогов, а также размещать в пределах площадок какие-либо предметы (рымы, органы управления системами, оборудованием), о которые можно споткнуться. Над площадками и маршами наклонных трапов по всей их длине и ширине в пределах высоты двух метров не допускается располагать какое-либо оборудование, ...
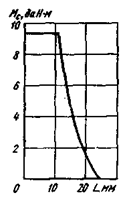
... , а при открытии клапана 17, наоборот, уменьшается. Когда оба клапана закрыты, разрежение в полости 19 остается неизменным. Рисунок 4. Структурная схема микропроцессорной системы управления сцеплением В зависимости от разрежения в полости 19. сервокамеры меняется положение ее штока 21, и соответственно регулируется момент Мс, передаваемый сцеплением. Из рассмотрения зависимости Мс от ...
0 комментариев