Любая из точек локального минимума унимодальной функции является и точкой ее глобального минимума на отрезке [а; b]
В конце вычислений по методу золотого сечения в качестве приближенного значения х* можно взять середину последнего из полученных отрезков
Следует иметь в виду, что если функция f (х) многомодальна, то описанным методом может быть найдена точка локального, а не глобального минимума f (х)
Навигация
Сравнительный анализ методов оптимизации
Сравнительный анализ методов оптимизации
42464
знака
5
таблиц
31
изображение
Министерство образования и науки Республики Казахстан
Карагандинский Государственный Технический Университет
Кафедра САПР
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовой работе
по дисциплине "Теория принятия решений"
Тема: "Сравнительный анализ методов оптимизации"
Руководитель:
(подпись) (дата)
Студент:
(группа)
_____________________
(подпись) (дата)
Караганда 2009
| |
Введение
1. Формулировка математической задачи оптимизации. Основные понятия
1.1 Формулировка математической задачи оптимизации
1.2 Минимум функции одной переменной
1.3 Минимум функции многих переменных
1.4 Унимодальные функции
1.5 Выпуклые функции
2. Прямые методы безусловной оптимизации
2.1 Прямые методы одномерной безусловной оптимизации
2.1.1 Метод деления отрезка пополам (дихотомии)
2.1.2 Метод золотого сечения
2.1.3 Практическое применение прямых методов одномерной безусловной оптимизации
2.2 Методы безусловной минимизации функций многих переменных
2.2.1 Метод циклического покоординатного спуска
2.2.2 Алгоритм Хука-Дживса
2.2.3 Практическое применение прямых методов безусловной многомерной оптимизации
2.2.4 Минимизация по правильному симплексу
2.2.5 Поиск точки минимума по деформируемому симплексу
2.2.6 Практическая реализация симплексных методов
3. Условная оптимизация
4. Линейное программирование
Заключение
Список использованной литературы
Введение
Задача оптимизации всегда была весьма актуальной, а в последнее время, с ускоренным развитием различных областей науки и техники, она приобрела еще более весомое значение.
Так как поведение любого физического объекта можно описать уравнением или системой уравнений (т.е. создать математическую модель реального объекта), то задачей инженера является подбор функции с заданной точностью при данных граничных условиях, которая бы могла "показать" оптимальное решение.
В данном курсовом проекте рассмотрены базовые методы оптимизации, которые дают основное представление о теории принятия решений и широко применяются в самых различных сферах.
1. Формулировка математической задачи оптимизации. Основные понятия
1.1 Формулировка математической задачи оптимизации
В достаточно общем виде математическую задачу оптимизации можно сформулировать следующим образом; минимизировать (максимизировать) целевую функцию с учетом ограничений на управляемые переменные.
Под минимизацией (максимизацией) функции n переменных f (x) = (x1,.., xn) на заданном множестве U n-мерного векторного пространства Еn понимается определение хотя бы одной из точек минимума (максимума) этой функции на множестве U, а также, если это необходимо, и минимального (максимального) на множестве U значения f (x). При записи математических задач оптимизации в общем виде обычно используется следующая символика:
f (x) ®min (max),
хÎ U
где f (x) - целевая функция, а U - допустимое множество, заданное ограничениями на управляемые переменные.
Если функция f (x) - скалярная, то задача ее оптимизации носит название задачи математического программирования. В этом случае критерий оптимизации один, и, следовательно, речь идет об однокритериальной (одномерной) оптимизации. Если же критериев несколько, то такая задача называется многокритериальной (задачей векторного программирования).
Если область допустимых значений исходной функции задана, то оптимизация называется условной, т.е. имеются ограничения.
Если же ограничений нет, т.е. областью определения является область существования функции f (x), то такая оптимизация называется безусловной.
1.2 Минимум функции одной переменной
Пусть функция f (x) определена на множестве U вещественной оси R.
1. Число х* Î U называется точкой глобального (абсолютного) минимума или просто точкой минимума функции f (x) на множестве U, если f (x*) £ f (x) для всех хÎ U.
Значение f * = f (x*) = ![]() называют глобальным (абсолютным) минимумом или просто минимумом функции f (x) на множестве U.
называют глобальным (абсолютным) минимумом или просто минимумом функции f (x) на множестве U.
Множество всех точек минимума f (x) на U в дальнейшем будет обозначено через U*.
2. Число ![]() ÎU называется точкой локального минимума функции f (x), если
ÎU называется точкой локального минимума функции f (x), если ![]() для всех xÎU, достаточно близких к
для всех xÎU, достаточно близких к ![]() , т.е. если существует e > 0 такое, что это неравенство выполняется для любого
, т.е. если существует e > 0 такое, что это неравенство выполняется для любого![]()
![]() .
.
Глобальный минимум f (x) является и локальным минимумом, а обратное неверно.
1.3 Минимум функции многих переменныхБудем рассматривать функции многих переменных f =f (x1, …, xn) как функции, заданные в точках х n-мерного евклидова пространства Еn: f =f (х).
1. Точка х*ÎЕn, называется точкой глобального минимума функции f (х), если для всех х*ÎЕn выполняется неравенство f (x*) £ f (х). Значение f (x*) = =![]() называется минимумом функции. Множество всех точек глобального минимума функции f (х) будем обозначать через U*.
называется минимумом функции. Множество всех точек глобального минимума функции f (х) будем обозначать через U*.
2. Точка ![]() называется точкой локального минимума функции f (х), если существует e-окрестность точки
называется точкой локального минимума функции f (х), если существует e-окрестность точки ![]() : Un (
: Un (![]() ) ={x | r (x,
) ={x | r (x, ![]() ) < e} такая, что для всех х*ÎUn (
) < e} такая, что для всех х*ÎUn (![]() ) выполняется неравенство f (
) выполняется неравенство f (![]() ) £ f (х).
) £ f (х).
3. Если допустимое множество U в задаче минимизации (максимизации) функции n переменных совпадает со всем пространством En, то говорят о задаче безусловной оптимизации
![]() , x Î En.
, x Î En.
Если функция f (x) на множестве U имеет, кроме глобального, локальные минимумы, отличные от него, то минимизация f (x), как правило, сильно затрудняется. В частности, многие методы поиска точки минимума f (x) приспособлены только для функций, у которых каждый локальный минимум является одновременно и глобальным. Этим свойством обладают унимодальные функции.
Функция f (x) называется унимодальной на отрезке [а; b], если она непрерывна на [а; b] и существуют числа a и b, ![]() , такие, что:
, такие, что:
1) если а < a, то на отрезке [a; a] функция f (x) монотонно убывает;
2) если b < b, то на отрезке [b; b] функция f (x) монотонно возрастает;
3) при х Î [a; b] f (x) =f * = ![]() .
.
Множество унимодальных на отрезке [а; b] функций мы будем обозначать через Q [а; b]. Отметим, что возможно вырождение в точку одного или двух отрезков из [a; a], [a; b] и [b; b]. Некоторые варианты расположения и вырождения в точку отрезков монотонности и постоянства унимодальной функции показаны на рисунке 1.
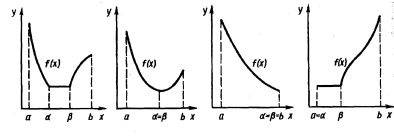
Рисунок 1 - Некоторые варианты расположения и вырождения в точку отрезков монотонности и постоянства унимодальной функции
Основные свойства унимодальных функций:
Похожие работы
... МП к некритическому экстраполированию результата считается его слабостью. Сети РБФ более чувствительны к «проклятию размерности» и испытывают значительные трудности, когда число входов велико. 5. МОДЕЛИРОВАНИЕ НЕЙРОННЫХ СЕТЕЙ ДЛЯ ПРОГНОЗИРОВАНИЯ СТОИМОСТИ НЕДВИЖИМОСТИ 5.1 Особенности нейросетевого прогнозирования в задаче оценки стоимости недвижимости Использование нейронных сетей можно ...
... с издержками двух или трех конкурентов. Это позволит выявить конкурентоспособность предприятия, определить имеющиеся резервы для снижения издержек. Подобный сравнительный анализ издержек производства на данном предприятии и предприятиях-конкурентах служит основанием для разработки и проведения стратегических мероприятий по снижению издержек производства и оптимизации производственной программы. ...
... от года-x и от номера месяца в году-y следующим образом: F(x)=50-x2+10x-y2+10y. Определите, в каком году и в каком месяце прибыль была максимальной. Зав. кафедрой -------------------------------------------------- Экзаменационный билет по предмету МЕТОДЫ ОПТИМИЗАЦИИ Билет № 22 1) Постановка вариационной задачи с ограничениями. Привести пример. 2) Дайте геометрическую ...
... ) аппарат, а затем полученную величину корректируют с учетом других факторов (долгосрочная стратегия предприятия, ограничения по производственным мощностям и пр). 3. Рекомендации по оптимизации величины себестоимости продукции на основе анализа соотношения "затраты - объем - прибыль" 3.1 Деление затрат на постоянные и переменные части и определение показателей маржинального дохода ...
0 комментариев