Навигация
Основные технические данные
98334
знака
16
таблиц
2
изображения
1.1.4 Основные технические данные
Электропитание от бортовой сети:
![]() постоянного тока напряжением В от двух бортов через диодные связки,
постоянного тока напряжением В от двух бортов через диодные связки,
![]() переменного трехфазного тока частоты (400±20) Гц напряжением В от четырех независимых взаимно резервированных самолетных трансформаторов 200/36 В 400 Гц.
переменного трехфазного тока частоты (400±20) Гц напряжением В от четырех независимых взаимно резервированных самолетных трансформаторов 200/36 В 400 Гц.
 |
Гидропитание от четырех независимых источников с жидкостью
АМГ-10 при
Полный ход агрегатов PA-8I - +35 мм.
Предельное отклонение управляющих поверхностей при управлении от демпферов при максимальном значении коэффициента передачи проводки:
руля направления ±.6°,
рулей высоты: вверх - 2°, вниз - 9°.
Предельные отклонения от заданных значений передаточных чисел и постоянных времени не более 25 %.
1.1.5 Основные эксплуатационные характеристикиПовышенная рабочая температура до +55 °С.
Пониженная рабочая температура до минус 60 °С.
Быстрое изменение давления с 746,6 до 120 кПа (с 560 до 90 мм рт.ст.) за время 15 с.
Повышенная влажность воздуха до 98 % при температуре до +35 °С. Синусоидальная вибрация в диапазоне частот от 5 до 2000 Гц с ускорением до 29,4 м/с2(3g) и максимальной амплитудой до 1,25 мм.
Механические удары с ускорением до 58,9 м/с2(6g) с длительностью импульса 20 мс. Линейное ускорение до 49,1 м/с2 (5g).
1.2 Описание
1.2.1 Принцип работыКаждый подканал системы СУУ-400 представляет собой электрогидравлическую следящую систему с позиционной обратной связью. Принцип работы системы основан на измерении угловых скоростей и линейных перегрузок объекта, обработки их в вычислителях устойчивости в соответствии с выбранными законами управления и отработки этих сигналов с помощью электрогидравлических рулевых агрегатов через кинематику изделия на рулевые поверхности, чем обеспечивается замыкание контура "самолет-демпфер" и демпфирование колебаний самолета относительно трех координатных осей. Измерение угловых скоростей осуществляется блоками демпфирующих гироскопов БДГ-25, в состав которых входят по 2 датчика типа ДУС-У; измерение линейных ускорений осуществляется блоками БДЛУ2-3, в состав которых входят по два датчика ДНУ ВД. В двухканальных вычислителях устойчивости ВУ-9 (тангаж), ВУ-10 (курс) производится обработка сигналов вышеперечисленных датчиков по заданным законам.
Обработка сигналов производится на платах фильтров (ФТ, ФК), сигнал с которых поступает на устройства демодуляции и усиления (УДУ-1), формирующие управляющие сигналы в электрогидравлические устройства (ЭГУ) подканалов рулевых агрегатов (РА) и преобразующие сигналы переменного тока с датчиков обратной связи (ДОС) РА в постоянный (рисунок 3, 4).
В качестве рулевых агрегатов используются двухканальные агрегаты PA-81.
Так как в руле направления изделия применена однобортовая механическая проводка управления РН, выходные звенья двух агрегатов PA-81 объединяются в кинематике изделия дифференциальной качалкой. Такое объединение позволяет уменьшить величину скачка по РH при активном отказе одного борта ДР вдвое, при этом скорость отработки сигналов ДР по РН уменьшается также вдвое. При разрушении однобортовой проводки управления изделия по РН предусмотрено дистанционное управление рулем направления через привод ДР, осуществляемое от рукоятки аварийного управления РАУ задающей угловое отклонение счетверенному потенциометрическому датчику аварийного управления ДАУ-1.
В проводке руля направления за рулевым агрегатом ДР установлен механизм Кш, позволивший уменьшить отклонение РН с ростом скоростного напора и построить СУУ-400 с неизменяемыми по режимам полета коэффициентами .
В руле высоты предусмотрено независимое управление от ДТ секциями РВ по левому и правому борту. При этом максимальное перемещение выходного звена одного РА при активном отказе одного борта ДТ приводит к перемещению секции РВ по одному борту, что снижает эффективность аэродинамического воздействия в два раза. В каждом вычислителе установлены устройства встроенного контроля, обеспечивающие работоспособность ДТ и ДР до третьего отказа. В качестве детектора отказов используется гамачный кворум-элемент, на вход каждого подканала которого поступают сигналы с ДОСов четырех подканалов РА.
По разнице между среднеарифметической величиной кворум-элемента подканала и сигналом ДОС этого подканала, превышающей допустимую величину, УВК производится отключение этого подканала от формирования усилия на общем выходном звене PA-8I и выдается сигнализация об отказе подканала в САС ("Неисправность демпфера") и в субблок логический (СЛ) для формирования интегральной оценки состояния демпфера: "Нет резерва" - при отказе двух подканалов, "Отказ демпфера" - при отказе трех подканалов. Кроме того, УВК формируется сигнал "Отказ борта" при отказе двух подканалов демпфера одного борта.
В каждом вычислителе размещены по два вторичных блока питания со стабилизированным напряжением: постоянного тока +15 В, переменного тока 36 В со средней точкой частоты 2400 Гц. для запитки электронных элементов вычислителя, датчиков обратной связи и потенциометров ДУСов.
Для запитки субблока логического в вычислителях ВУ-9, БУ-10 установлены по два стабилизатора напряжения на 5 В, конструктивно размещенных на одной плате. Для обеспечения элементов и блоков СУУ-400 непрерывным электропитанием постоянного тока при потере одного из бортов стабилизаторы напряжения в вычислителях запитываются через диодные сборки от двух бортовых источников.
1.2.1.1 Демпфер тангажаАвтомат продольной устойчивости (демпфер тангажа) обеспечивает необходимые запасы устойчивости и качества коротко-периодического движения изделия.
Управление рулем высоты от ДТ осуществляется по следующему
закону:

где
Демпфирование колебаний изделия в канале тангажа производится по сигналам угловой скорости щx, формируемым блоками БДГ-25-9. Для повышения устойчивости в закон введен сигнал перегрузки (ny), формируемый блоками БДЛУ2-3. Функциональная схема демпфера тангажа представлена на рисунке 3. Два двухканальных блока БДГ-25 по четырем независимым цепям выдают сигналы постоянного тока, пропорциональные угловой скорости щz . Два двухканальных блока БДЛУ2 по четырем независимым цепям выдают сигналы постоянного тока, пропорциональные линейному ускорению ny.
Эти сигналы поступают в вычислители устойчивости тангажа ВУ-9 через переменные резисторы "Kщ", "Kn" на платы фильтров тангажа ФТ (рисунок 3), где происходит преобразование сигналов "щz", (ny-I) в соответствии с заданным законом управления (I). Переменные резисторы "Kщ", "Kn" предназначены для регулировки коэффициентов передачи Kщz, Kny в пределах +30% "Кном. Конструктивно эти резисторы находятся в блоках регулировок БP-I2, расположенных на лицевых панелях вычислителей. Фильтр ![]() в цепи сигнала "ny" формируется с помощью резисторов R9, R10 и конденсатора CI на входе усилителя, расположенного на плате фильтров ФТ.
в цепи сигнала "ny" формируется с помощью резисторов R9, R10 и конденсатора CI на входе усилителя, расположенного на плате фильтров ФТ.
В систему сбора информации через резисторы R1 и R3 из фильтра тангажа выдаются сигналы, пропорциональные щz, nУ соответственно. К шинам АОК при автоматизированном наземном контроле сигналы "щz" С БДГ-25-9 подключаются контактами реле KII, установленных в плате коммутатора контрольных сигналов KKC-I вычислителя. Подключение сигналов "ny" к шинам реакции АОК осуществляется контактами реле, установленных в блоке контроля EK-I датчиков БДЛУ2-3. Для выявления обрыва цепи входных сигналов "щz", "ny" при отсутствии возмущений и своевременного отключения неисправного подканала в фильтре предусмотрено опорное напряжение Uоп, поступающее через резисторы R6, R5 на вход усилителя фильтра тангажа при обрыве соответствующего сигнала ("щz" или "ny"). В фильтре установлены "тестовые" реле KI, K2, обеспечивающие подключение стимулирующих сигналов из АОК и сигналов реакции фильтра (КЗ) к шинам реакции АОК при автоматизированном наземном контроле по командам АОК.
Сигналы "щz","ny" суммируются на входе усилителя фильтра и с выхода усилителя через сопротивление R13 поступают на вход устройства демодуляции и усиления УДУ-1.
В УДУ на синхронном выпрямителе ВС происходит выпрямление сигналов с датчиков обратной связи (ДОС) рулевых агрегатов (РА), суммирование их с входными сигналами с фильтра тангажа и усиление их. Управляющие сигналы с УДУ поступают в обмотки преобразователей сигналов (ПС) РА (рисунок 3), где электрические сигналы преобразуются в перемещение заслонок электрогидравлических усилителей (ЭГУ), что приводит к перемещению штоков РА, через кинематику изделия связанных с секциями руля высоты РВ.
Для обеспечения автоматизированного наземного контроля в УДУ-1 установлены "тестовые" элементы V I - V 4, R II - R 17, С2, СЗ. Реле, обеспечивающие подключение командных сигналов из АОК и подключение сигналов реакции УДУ к шинам реакции, расположены на плате коммутации контрольных сигналов KKC-I. В вычислителях расположены устройства встроенного контроля, осуществляющие контроль работоспособности каждого подканала демпфера, функционально УВК каждого подканала ДТ включает в себя (рисунок 3):
- устройство резервирования и контроля УРК-I, УРК-П,
- дополнительный компаратор Кд - I ( Кд - П),
- реле времени PB-I (РВ-II),
- устройство коммутации УК-1 (УК-II),
- сигнализатор нарушения питания СНП-I (СНП-II).
Примечание. Конструктивно СНП расположен в вычислителе устойчивости демпфера рыскания ВУ-10. Сигналы с СНП поступают в вычислитель устойчивости ДТ (рисунок 3).
Кроме того, для формирования интегральной информации о состоянии демпфера в каждом вычислителе расположены:
- субблок логический СЛ,
- реле времени нерасчетного отказа РВ н.о.
Для обеспечения работоспособности четырехкратно-резервированных подсистем (ДТ, ДР) с конструктивным разнесением по бортам (2 подканала на каждом борту) до 3-го отказа в демпфере используется электронный контроль по сигналам ОС.
Сигналы ОС после выпрямления в УДУ поступают на вход гамачного кворум-элемента, расположенного на плате УРК каждого подканала демпфера (рисунок 3).
По разнице между среднеарифметической величиной кворум-элемента и сигналом ОС этого подканала, превышающей допустимую величину, срабатывает компаратор К неисправного подканала, выдавая с выхода 5 сигнал 0 В в устройство коммутации (УК) подканала на реле KI. При срабатывании реле КС обрывается питание ЭМК, чем обеспечивается отключение неисправного подканала РА от формирования усилия на общем выходном звене за счет снижения давления в гидропружине подканала.
Кроме того, по сигналу отказа с выхода 5 компаратора срабатывает реле KI, установленное в корпусе вычислителя. Контактами этого реле снимается сигнал +27 В ИСПРАВНОСТЬ подканала с входа субблока логического (СЛ), которым формируется интегральная оценка состояния демпфера.
Для повышения надежности отключения неисправного подканала и исключения возможности неотключения неисправного подканала из-за пассивного отказа элементов компаратора К параллельно установлен дополнительный компаратор Кд, выдающий при отказе подканала сигнал отключения в виде "0" В на реле К2 устройства коммутации УК и вычислителя.
С аналогичной целью задублирована исполнительная часть субблока логического СЛ.
Отключение неисправного подканала демпфера производится по сигналам:
"О РслДД" - при потере гидропитания в подканале;
"О отказа ГМ - при снижении оборотов ГМ ниже допустимых;
"О отказа ~ тока" - при перерыве электропитания переменным током: на время ф≤1с с последующим подключением к общему выходному звену;
на время ф≥1с без восстановления работоспособности подканала при восстановлении электропитания через ф≥2с. Принудительное отключение подканала демпфера производится по сигналам:
"+27 В Отказ демпфера" - при отказе трех подканалов демпфера "+27 В Нет резерва" - при одновременном (за время ф≤0,5с) отказе двух подканалов демпфера.
При одновременном отказе двух подканалов демпфера, (за время ф≤0,5с ) с помощью РВН.О формируется сигнал нерасчетного отказа демпфера, по которому производится отключение всего демпфера. Отключение всего демпфера осуществляется также по сигналу с субблока логического "Отказ демпфера" при последовательном отказе трех подканалов.
При пропадании питания на шинах переменного тока 3 ~ 400 Гц 36 В сигнализатором нарушения питания СНП формируется сигнал "0 отказа ~ тока", по которому запускается реле времени РВ.
Реле времени по сигналу "0 отказа ~ тока" в течение 2 с выдает сигнал, отключающий питание ЭМК рулевого агрегата, чем осуществляется отключение этого подканала РА от общего выходного звена.
По этому же сигналу блокируется срабатывание компараторов К и К9 Если в точение 2 с питание на шинах переменного тока не восстанавливается, РВ выдает сигнал в компараторы К и КЗ на отключение подканала.
При восстановлении электропитания на шинах переменного тока в течение времени ф≤2с сигнал "О отказа ~ тока" снимается с СНП и с РВ, при этом СНП формирует импульс восстановления ~ тока длительностью 1 с , поступающий в компараторы для их блокировки и в ЭМК гидропружины на время согласования штока РА отключенного подканала с исправно работавшими.
Устройства встроенного контроля каждого вычислителя (УРК, УК, Кд -I) формируют и выдают в систему автономной сигнализации САС сигналы:
"Неисправность демпфера" - при отказе одного из подканалов демпфера "Отказ борта" - при отказе двух подканалов одного борта демпфера. Сигналы "Нет резерва" и "Отказ демпфера" формируются субблоком логическим СЛ и выдаются в САС через диодную сборку Кд-II при отказе двух и трех подканалов демпфера соответственно. Автоматизированный контроль работоспособности УБК при наземном контроле осуществляется через встроенные элементы уплотнения информация, расположенные на платах Кд-I, Кд-II, СНП, KKC-I.
1.2.1.2 Демпфер рысканьяУправление рулем направления РН от демпфера рыскания осуществляется по следующему закону:
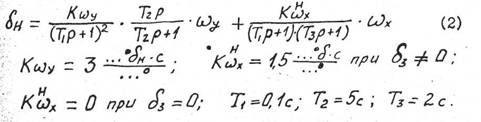
д3- угол отклонения закрылков. Фильтр высоких частот введен в закон управления для обеспечения необходимых запасов устойчивости контура изгибных колебаний и уменьшения межканальных рассогласований в четырехканальном приводе. Перекрестная связь в ДР введена для улучшения координированного разворота за счет уменьшения угла скольжения.Функциональная схема демпфера рыскания представлена на рисунке 4.
Измерение угловых скоростей щу , щx осуществляется блоками демпфирующих гироскопов БДГ-25-6, БДГ-25-9 соответственно.
Сигналы угловых скоростей wу, wх поступают в вычислитель устойчивости курса ВУ-10 через переменные резисторы "Kщy', "Kщx" на платы фильтров ФК, где происходит их преобразование в соответствии с законом управления (2). Переменными резисторами "Kщy", "Kщx", расположенными в блоках регулировок БP-I2-I на лицевых панелях вычислителей, осуществляется регулировка коэффициентов передачи Kщy, Kщx в пределах +30 % Кном.
Фильтры с T1 = 0,1 формируются резисторами R8, R9 и конденсатором С9 на входе усилителя фильтра курса ФК и резистором R12, конденсатором С8 в обратной связи усилителя.
Изодром с Т2=5с набран на плате ФК элементами C1, С2, R8, R9, R12.
Апериодическое звено с Тд = 2 с формируется на входе усилителя ФК элементами R 10, R II, СЗ - С7.
На плате ФК расположено реле К4, отключающее сигнал "wx" на маршруте при снятии команды "+27 В 6з > О".
С помощью контактов реле КЗ закорачивается изодром при наземных проверках коэффициента передачи Кщу.
Через контакты реле К2, установленного в KKC-I, подается команда на реле К4 фильтра курса при автоматизированных наземных проверках коэффициента передачи Кwх от АОК.
Отключение подканала при обрыве входных сигналов "щy", "щх" осуществляется подачей опорного напряжения Von на вход усилителя фильтра через резисторы R 4, R 5 соответственно.
Тестовые реле К1, К2, К7 установлены в фильтре для связи с АОК при наземном автоматизированном контроле.
Сигналы "щy", "щх" суммируются на усилителе фильтра и через сопротивление R 14 поступают на вход УДУ-1.
Дальнейшее формирование сигнала управления рулем направления аналогично формированию сигнала управления рулем высоты (см.п.2.1.1)
Контроль работоспособности ДР аналогичен контролю ДТ (см.п.2.1.1).
Для управления рулем направления при разрушении механической проводки управления РН предусмотрено дистанционное управление через привод демпфера рыскания от рукоятки аварийного управления (РАУ), установленной на центральном пульте экипажа.
Сигналы с датчика аварийного управления ДАУ-I, соединенного с рукояткой, поступают на вход устройства демодуляции и усиления через резистор RI6 и контакты реле К5, установленные в фильтре курса.
Команда на включение реле К5 поступает с центрального пульта экипажа с концевых выключателей при открывании предохранительной крышки над рукояткой РАУ.
Сигналы, пропорциональные угловым скоростям wу, wx, выдаются в систему сбора информации через резисторы R3, R6 фильтра курса.
Подключение сигналов "щу" , "щх" при автоматизированном наземном контроле к шинам реакции осуществляется с помощью реле К9, K11 коммутатора контрольных сигналов.
1.3 Работа 1.3.1 Включение системыПодача питания осуществляется в следующей последовательности;
после подачи гидропитания подается электропитание переменного тока 36В 400 Гц, затем постоянного тока 27 В.
Система СУУ-400 включается перед взлетом и выключается после посадки.
1.3.2 Нормальная работа демпфера тангажа (курса)При нормальной работе демпфера подканалы РА находятся в согласованном состоянии и с датчиков обратной связи через узел суммирования и центровки на входы кворум-элементов поступают одинаковые сигналы "Uос" . При этом разница, между среднеарифметической величиной на. выходе КЭ - "Uoc cp" и "Uoc" каждого подканала не превышает порога срабатывания компараторов KI, Klz> , КП, КПд . Реле KI, К2, Ш, KI2 на устройстве коммутации обесточены.
+27 В через диодную сборку от АЗСов СУУ-400 левого и правого борта через нормально-замкнутые контакты реле KI, К2, KII, KI2 устройства коммутации поступает на обмотки ЭМК РА как сигнал "+27 В Исправность", I, П подканала демпфера. Эти же +27 В через нормально-замкнутые контакты реле KI, K2, КЗ и К4, установленные в корпусе вычислителя. ВУ-9 (ВУ-10), поступают на вход субблока логического СЛ в виде сигналов "+27 В Исправность" I и II подканалов демпфера соответственно. Кроме, того, на вход СЛ поступают сигналы "+27 В Исправность" Ш, 1У подканала демпфера из вычислителя устойчивости ВУ-9 (ВУ-10) правого борта. Сигналы "+27 В Исправность" I, II подканала демпфера также поступают на вход СЛ, расположенного в вычислителе правого борта.
1.3.3 Отказы в канале тангажа (курса) 1.3.3.1 Рассогласование между подканаламиПри рассогласовании между подканалами демпфера, превышающем допустимую величину, по разнице между Uoc.ср и Uос неисправного подканала, равной порогу срабатывания компараторов, срабатывают компараторы К, Кд неисправного подканала (например I) и с задержкой по времени 0,1 с на выходе 5 компараторов KI, KIд появляется сигнал отказа в виде напряжения 0 В. Эти сигналы поступают на обмотку реле К узла кворумирования (КЭ), на обмотки реле KI и К2 УК1 и на. обмотки реле KI, K2, установленные в корпусе вычислителя.
При срабатывании реле КI, К2 УК1 нормально замкнутые контакты этих реле размыкаются и снимают питание с ЭМК РА, контактами реле КI, К2 вычислителя снимается сигнал "+27 В Исправность I" с субблоков логических. В гидропружине неисправного подканала РА давление падает до сливного, при этом якорь СД устанавливается в положение "Рсл" и сигнал с него "ОВ" поступает на один из входов (БI) УРК-I, чем формируется "память" об отказе подканала.
Контакты реле К в УРК1 при срабатывании отключают входной сигнал "Uос" от формирования среднеарифметической величины. Uoc.ср. и выдают сигнал "0 В Отказа":
- в узел коммутации (УК1) на обмотку реле К4 для формирования сигнал "+27 В Неисправность ДТ (ДР)"
- на формирователь |< , с выхода которого запускается реле времени нерасчетного отказа (Р.В.Н.0),
- на ячейку И для выдачи сигнала отказа при опросе.
"0" отказа в узле коммутации (УК1) вызывает срабатывание реле К4, через контакты которого "+"27В поступает в узел компараторов (Кд-I) на ячейку И1 и на диодную сборку для выдачи сигнализации "+27В Неисправность ДТ (ДР)" в:
-САС через контакты реле К дополнительного компаратора Кд-I,
-АОК через диодную сборку.
1.3.3.2 Отказ гиромоторовПри снижения оборотов гиромоторов ниже допустимой величины или при обрыве одной из фаз переменного тока, запитывающих гиромоторы БДГ, блоками контроля вращения гиромоторов БКВГ формируется сигнал "О отказа ГМ", поступающий на вход компаратора (AI, БЗ) для отключения неисправного подканала демпфера с задержкой С = 90 120 мс.
1.3.3.3 Перерывы электропитания на шинах переменного тока напряжением 36 В частоты 400 ГцПеременным током в СУУ-400 запитаны гиромоторы блоков БДГ-25 и блоки питания в БДЛУ2-3.
При перерыве переменного тока на время до 2 с скорость вращения гиромоторов не снижается ниже допустимой величины и датчики угловых скоростей выдают в систему достоверные сигналы угловых скоростей. Однако, при восстановлении электропитания на шинах переменного тока блоком контроля вращения гиромотора формируется сигнал "О отказа ГМ" длительностью до 120 мс, по которому происходит отключение соответствующего подканала PA-8I с "памятью", то есть работоспособность подканала не восстанавливается при восстановлении электропитания .
Блок БДЛУ2-3 при отсутствии перегрузок на объекте выдает сигнал, пропорциональный 9,8 м/с который компенсируется опорным напряжением в фильтре тангажа и выходное звено РА находится в нейтральном положении.
При перерыве переменного тока в подканале ДТ сигнал с БДЛУ2-3 снимается, исполнительный механизм данного подканала РА опорным напряжением смещается на 1/3 максимального хода траверсы РА, и, если это происходит в"сильном" подканале РА, на 1/3 хода перемещается секция рулевой поверхности. При наличии перегрузки обратного знака возможно отключение этого подканала.
Для исключения вышеописанных явлений в СУУ-400 предусмотрено отключение исполнительных механизмов подканалов PA-81 от общего выходного эвена при перерыве переменного тока в этом подканале на время ф≤2с с последующим их подключением к траверсе при восстановлении электропитания переменным током, осуществляемое следующим образом:
При пропадании в одном из подканалов СУУ-400 электропитания переменным током напряжением 36 В 400 Гц сигнализатором нарушения питания (СНП) формируется сигнал "0 отказа ^ тока" (рис.3) поступающий на вход реле времени (РB) этого подканала в вычислители ВУ-Ю, ВУ-9. Реле времени в течение 2 с выдает сигнал "0 отказа ~ тока в теч. 2 с", которым отключается электропитание ЭМК, чем обеспечивается отключение данного подканала РА от общего выходного звена и блокируется срабатывание компараторов К и Kд по рассогласованию между подканалами, возможному в ДТ при наличии перегрузки (см. входы A18 и А9 на К и Кд соответственно).
![]()
![]() При восстановлении электропитания на шине переменного тока в течение времени С < I с сигнал "0 отказа ~ тока" с CНП и соответственно с выхода РВ снимается, и сигнализатором нарушения питания формируется импульс длительностью 1с "_| |_ восстановления ~ тока", который блокирует срабатывание К и Кд по сигналу "0 отказа ГМ" и дает возможность подканалам РА прийти в согласованное состояние при обесточенном ЭМК подканала, то есть снять рассогласование на входе КЭ по сигналам U ос, после чего происходит подключение штока подканала РА к общему выходному звену. Если питание 36 В 400 Гц не восстанавливается по истечении 2 с то сигнал-"О отказа ~ тока, в теч.2 с" на одном из выходов РВ снимается, а на втором выходе РВ появляется сигнал "О отказа ~ тока, через t > 2 с", которым производится отключение подканалов РА демпферов тангажа и рыскания с "памятью".
При восстановлении электропитания на шине переменного тока в течение времени С < I с сигнал "0 отказа ~ тока" с CНП и соответственно с выхода РВ снимается, и сигнализатором нарушения питания формируется импульс длительностью 1с "_| |_ восстановления ~ тока", который блокирует срабатывание К и Кд по сигналу "0 отказа ГМ" и дает возможность подканалам РА прийти в согласованное состояние при обесточенном ЭМК подканала, то есть снять рассогласование на входе КЭ по сигналам U ос, после чего происходит подключение штока подканала РА к общему выходному звену. Если питание 36 В 400 Гц не восстанавливается по истечении 2 с то сигнал-"О отказа ~ тока, в теч.2 с" на одном из выходов РВ снимается, а на втором выходе РВ появляется сигнал "О отказа ~ тока, через t > 2 с", которым производится отключение подканалов РА демпферов тангажа и рыскания с "памятью".
Электропитание подканалов СУУ-400, в том числе устройств встроенного контроля - УРК, Кд осуществляется от вторичных у источников - стабилизаторов напряжения 36 В 2400 Гц переменного тока со средней точкой и постоянного тока +15 В.
При пропадании одного из видов напряжения ячейкой КП, расположенной на платах УРК и Кд , формируется сигнал "0", по которому с задержкой t =0,09 + 0,12с компараторами К и К д и устройством коммутации УК производится отключение неисправного подканала ДР или ДТ.
1.3.3.5 Отсутствие гидропитания в одном подканале РАПри отсутствии гидропитания в гидропружине одного из подканалов РА срабатывает микропереключатель в сигнализаторе давления СД и выдает сигнал О В на вход (Б1) компаратора К в УРК. По этому сигналу компараторами К и Кд и устройством коммутации производится отключение питания ЭМК неисправного подканала. Обрыв сигнала с ДУСа и отсутствие сигнала управления в обмотке преобразователя сигналов ПС рулевого агрегата.
При обрыве сигнала с ДУСа шток подканала РА опорным напряжением в фильтре (ФТ, ФК) перемещается на величину, при которой рассогласование между подканалами превышает допустимую величину. При этом при разности Uoc cр и Uoc неисправного подканала, равной порогу срабатывания, срабатывают компараторы К и КЭ и через устройство коммутации УК отключают электропитание ЭМК, чем обеспечивается отключение подканала РА от общего выходного звена.
Аналогично производится отключение подканала РА от общего выходного звена при обрыве цепи обмотки управления ПС, при этом перемещение поршня соответствующего подканала РА на выдвижение обеспечивается технологическим смещением нуля золотника.
1.3.3.6 Сигнализация, выдаваемая УБК ДТ и ДРПри любом первом отказе УВК выдается сигнал "+27 Б Неисправность демпфера" в АОК и в САС - бортинженеру. Сигнал отказа подканала формируется платой УРК. При срабатывании реле К "0" отказа через контакт А7. УРК поступает на обмотку реле К4 или К9. Реле срабатывает и через его контакты +27В поступают на вход ячейки И1 и на диодную сборку платы дополнительного компаратора Кд-1 первого подканала вычислителя.
Далее этот сигнал через диодную сборку поступает в АОК и через контакты реле К в СAC для бортинженера. При отказе двух подканалов на обмотку реле К подается сигнал
"+27 В Нет резерва", формируемый субблоком логическим. Реле срабатывает и снимает сигнал "+27 В Неисправность" с САС, при этом в САС поступает сигнал "+27 В Нет резерва" с субблока логического.
При наличии отказов на двух входах ячейки И1, с нее поступает сиг-нал на ячейку И2, которая при наличии сигнала "+27 В Нет резерва" формирует сигнал "+27 В Отказ борта" для САС, откуда сигнал поступает к бортинженеру, на центральный пульт летчиков и САЗ. При отказе трех подканалов в демпфере субблоком логическим формируется сигнал "+27 В Отказ демпфера", который поступает в САС и через диодную сборку дополнительного компаратора Кд-II второго подканала вычислителя в САЗ, АОК, МСРП, при этом сигналы "+27 В Нет резерва" и "+27 В Отказ борта" в САС снимаются.
Похожие работы

... с положительностью сальдо поступлений и расходов и малым сроком окупаемости. 6. Обеспечение безопасности жизнедеятельности в системе ДО В данном дипломном проекте разработана автоматизированная информационная система дистанционного обучения по дисциплине “Финансы и кредит”. Ее использование тесно связано с применением ПЭВМ, поэтому организация рабочего места пользователя системы должна ...
... подведомственной территории определяет особый интерес к нему со стороны органов местного самоуправления. На передний план выходят вопросы рационального управления развитием и состоянием рынка бытовых услуг на муниципальном уровне. Исследования, проведенные в работе, определили способы экономического регулирования рынка, которые целесообразно использовать на уровне муниципального управления. В ...
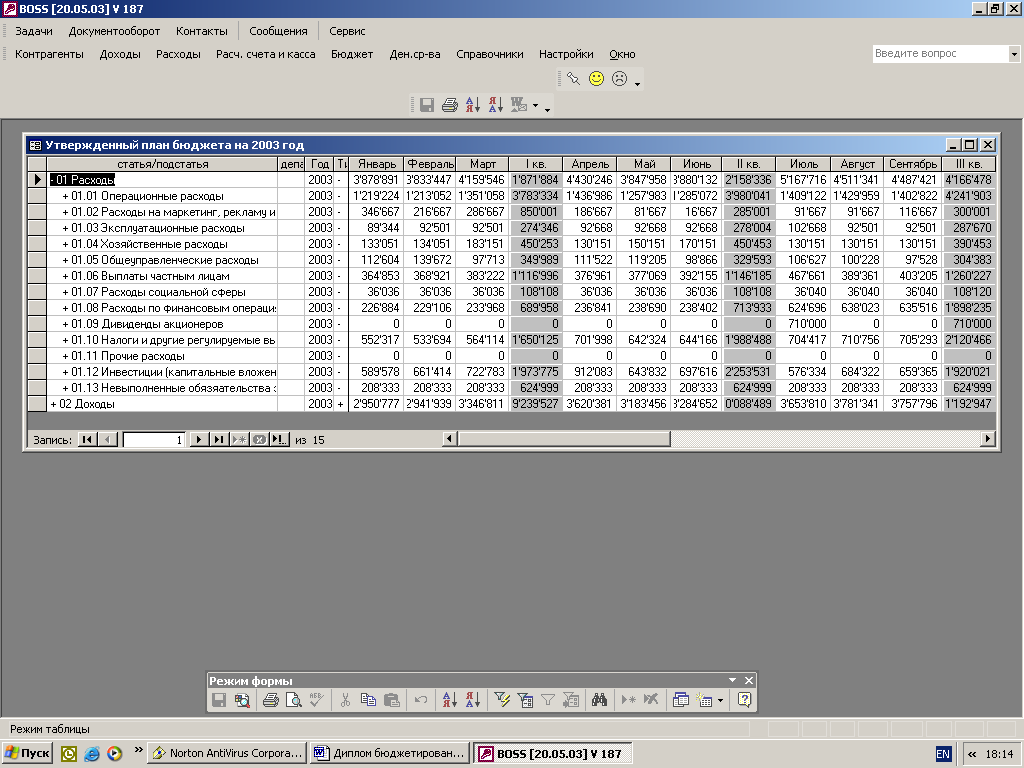
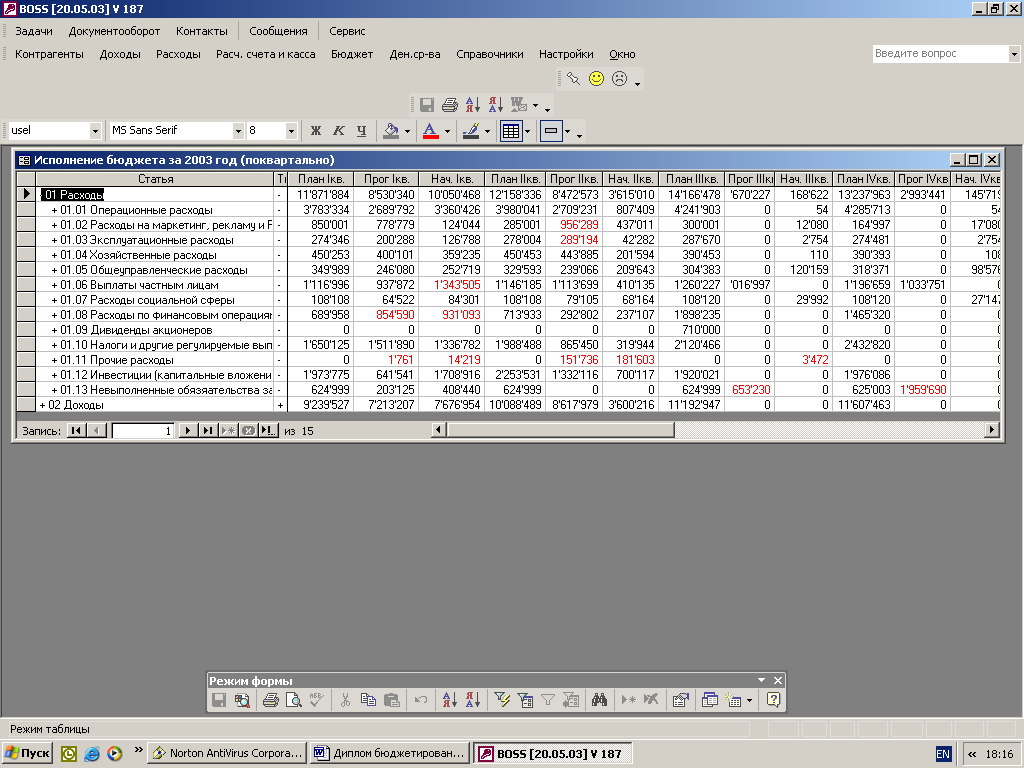
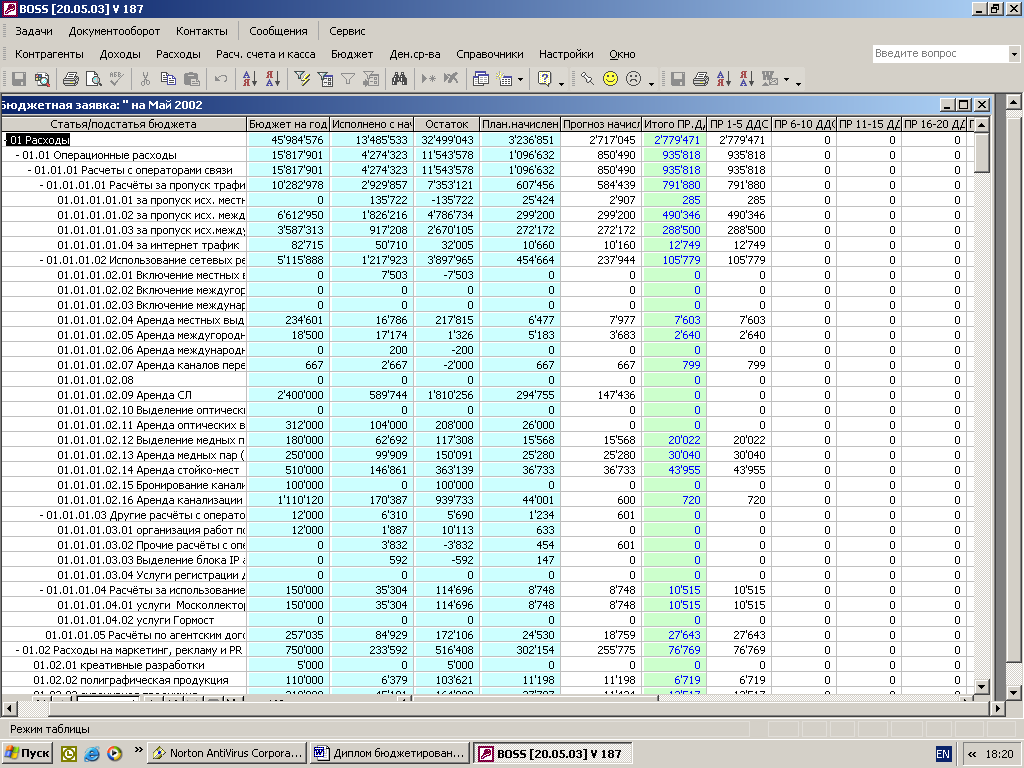
... для реализации системы бюджетирования Консультационной группы "Воронов и Максимов". Статья о проблемах выбора системы бюджетирования - в проекте "УПРАВЛЕНИЕ 3000". Бюджетный автомат Если вы решитесь на автоматизацию системы бюджетирования компании, перед вами сразу встанут вопросы: что выбрать, сколько платить, как внедрять. Примеряйте! О ЧЕМ РЕЧЬ В “Капитале” на стр. 44, 45 мы рассказали ...
... кадрового состава организации стоящим перед ней целям – задачи службы персонала. Анализируя ситуацию, можно сделать следующие выводы по поводу работа отдела по управлению персоналом. Естественно, что в УФПС Смоленской области филиала ФГУП «Почта России» никто не занимается прогнозом кадровых потребностей, не проводится оценка труда и персонала. Отсутствует диагностика кадровой ситуации в целом. ...
0 комментариев