Особенности микросхемы ATtiny2313
АЛУ – арифметико-логическое устройство
Системная перепрограммируемая Flash-память программ
Использование портов для цифрового ввода-вывода
Используемые обозначения
Принудительное изменение состояния выхода совпадения
Режим сброса при совпадении (СТС)
ШИМ, корректный по фазе (PhaseCorrectPWM)
Система команд
Команды регистровых операций
Команды с обращением к регистрам ввода-вывода
Навигация
ШИМ, корректный по фазе (PhaseCorrectPWM)
Микроконтроллеры семейства AVR фирмы Atmel
66570
знаков
14
таблиц
12
изображений
5.15 ШИМ, корректный по фазе (PhaseCorrectPWM)
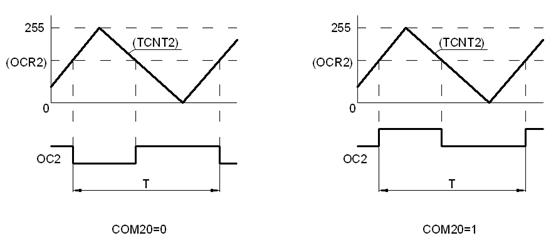
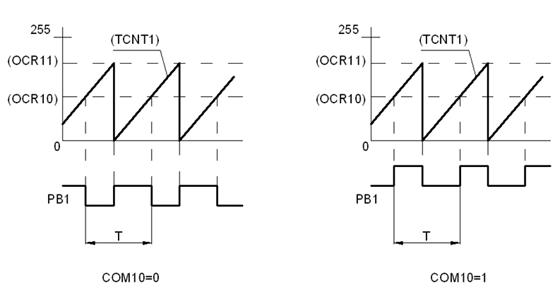
Режим phase correct PWM (WGM02:0 = 1или 5). Формирование сигнала ШИМ происходит с большим коэффициентом пересчёта и корректного по фазе. Корректность по фазе обеспечивается благодаря работе счётчика в режиме пилообразного сигнала с двухсторонним наклоном.
Счётчик периодически изменяет направление своего счёта. Сначала он считает от BOTTOM до TOP, затем направление счёта меняется, и счётчик считает TOP до BOTTOM. Затем направление пересчёта снова меняется, и всё повторяется сначала.
Значение TOP равно 0xFF при WGM2:0 = 1 и определяется регистром OCR0Aпри WGM2:0 = 5.
В режиме неинвертирующего вывода сигнал на выходе OCR0x сбрасывается в ноль в момент совпадения содержимого регистров TCNT0 и OCR0x, если счётчик работает в прямом направлении (на увеличение). Значение устанавливается в единицу в момент совпадения, если счётчик работает на уменьшение.
В режиме инвертированного вывода картина меняется на противоположную. Режим двухстороннего наклона характеризуется более низкой максимальной частотой выходного сигнала по сравнению с предыдущим случаем, где применяется пила с односторонним наклоном. Благодаря симметричности по фазе при двустороннем наклоне такие режимы предпочитаются при создании систем управления электродвигателями.
В режиме phase correct PWM значение счётчика увеличивается, пока не достигнет значения TOP. Когда значение счётчика достигает TOP, направление счёта изменяется. Содержимое TCNT0 будет равно TOP в течение одного периода тактового сигнала таймера. Флаг переполнения таймера/счётчика (TOV0) устанавливается каждый раз, когда счётчик достигает значения BOTTOM. Флаг прерывания может использоваться для генерации запроса на прерывание. Такое прерывание будет вызвано каждый раз, когда содержимое счётчика достигнет значения BOTTOM.
В режиме phasecorrect PWM модуль совпадения используется для генерации сигнала ШИМ на выходе OC0x. При установке битов COM0x1:0 = 3. Установка битов COM0A0 = 1заставляет сигнал на выходе OC0A инвертироваться каждый раз в момент совпадения, если бит WGM02 установлен. Эта опция не доступна для вывода OC0B. Фактическое значение OC0x поступает на внешний вывод порта только в том случае, если он сконфигурирован как выход.
Сигнал ШИМ сгенерируется путём сброса (установки) OC0xв момент совпадения содержимого регистров OCR0xи TCNT0, когда счётчик работает на увеличение, и устанавливается (сбрасывается) в момент совпадения, если счётчик работает на уменьшение. Частота выходного сигнала ШИМ в режиме phase correct PWM может быть вычислена по следующей формуле:
![]() ,
,
Где переменная N представляет собой коэффициент предварительного деления (1, 8, 64, 256, 1024).
Крайние значения содержимого регистра OCR0A при генерации сигналов ШИМ в режиме phase correct PWM представляют собой специальные случаи. Для неинвертирующего режима при записи в регистр OCR0Aзначения BOTTOM на выходе установиться низкий логический уровень. При записи в OCR0Aзначения MAX на выходе установится логическая единица. Для инвертирующего режима сигнал на выходе будет иметь противоположные значения.
6. Описание системы команды
6.1 Система команд. Общие сведения о системе команд
В семействе AVR система команд у микроконтроллеров разных типов содержат от 89 до 130 команд. У микроконтроллеров типа 2323, 2343, 2313, 4433, 8515 и 8535 в систему команд входят 118 команд. Эту систему команд будем называть базой.
В табл. 2.1 – 2.13 описаны операции, выполняемые по командам базовой системы, и приведены мнемокоды команд, используемые при разработке программы на языке AVR Ассемблера. В таблицах дана сквозная нумерация команд, используемая далее в тексте.
Базовая система команд содержит:
▪ 33 команды регистровых операций, при выполнении которых используются только регистры общего назначения (команды №№ 1-33);
▪ 26 команд с обращением по адресу в адресном пространстве SRAM (команды №№ 34-59);
▪ 2 команды с обращением к регистрам ввода-вывода (команды №№ 60 и 61);
▪ 1 команда с обращением к FlashROM (команда № 62);
▪ 22 команды операций с битами в разрядах регистров общего назначения и регистров ввода-вывода (команды №№ 63-84);
▪ 34 команды управления ходом программы (команды №№ 85-118).
В систему команд микроконтроллеров типа t11, t12, t15, 1200, и t28, у которых нет SRAM, не входят команды с обращением по адресу в адресном пространстве SRAM за исключением команд с мнемокодами LDRd, Z (№ 40) и STZ, Rr (№ 41), по которым производится обращение к регистрам общего назначения и регистрам ввода-вывода с использованием косвенной адресации. В систему команд у этих микроконтроллеров не входят также 2 команды регистровых операций (№№ 32 и 33) и две команды управления ходом программы (№№ 86 и 88). У микроконтроллеров типа 1200 в систему команд не входит также команда с обращением к FlashROM, а у микроконтроллера типа m163, кроме того, с наличием аппаратного умножителя.
Таблица 2
| № | Операция | Мнемокод команды | Признаки результата | |||||||||
| H | S | V | N | Z | C | |||||||
| 1 |
| CKR Rd | 0 | 0 | 0 | 1 | ||||||
| 2 | (Rd) → Rd((Rd)^( Rd) → Rd) | TST Rd | + | 0 | + | + | ||||||
| 3 |
| COM Rd | + | 0 | + | + | 1 | |||||
| 4 | - (Rd) → Rd($00-( Rd) → Rd) | NEG Rd | + | + | + | + | + | + | ||||
| 5 | (Rd)+1→ Rd | INC Rd | + | + | + | + | ||||||
| 6 | (Rd)-1→ Rd | DEC Rd | + | + | + | + | ||||||
| 7 | 0→( Rd) →C | LSR Rd | + | + | 0 | + | + | |||||
| 8 | C←( Rd) ←0 | LSL Rd | + | + | + | + | + | + | ||||
| 9 | C→( Rd) →C | ROR Rd | + | + | + | + | + | |||||
| 10 | C←( Rd) ←C | ROL Rd | + | + | + | + | + | + | ||||
| 11 | Rd.7→( Rd.6- Rd.0) →C | ASR Rd | + | + | + | + | + | |||||
| 12 | Rd.4-7↔ Rd.0-3 | SWAP Rd | ||||||||||
| 13 | (Rr) → Rd | MOV Rd, Rr | ||||||||||
| 14 | (Rd)+(Rr) → Rd | ADD Rd, Rr | + | + | + | + | + | + | ||||
| 15 | (Rd)+(Rr)+C→ Rd | ADC Rd, Rr | + | + | + | + | + | + | ||||
| 16 | (Rd)-(Rr) → Rd | SUB Rd, Rr | + | + | + | + | + | + | ||||
| 17 | (Rd)-(Rr)-C→ Rd | SBC Rd, Rr | + | + | + | + | + | + | ||||
| 18 | (Rd)-(Rr) | CP Rd, Rr | + | + | + | + | + | + | ||||
| 19 | (Rd)-(Rr)-C | CPC Rd, Rr | + | + | + | + | + | + | ||||
| 20 | (Rd) ^(Rr) → Rd | AND Rd, Rr | + | 0 | + | + | + | |||||
| 21 | (Rd)˅(Rr) → Rd | OR Rd, Rr | + | 0 | + | + | ||||||
| 22 |
| EOR Rd, Rr | + | 0 | + | + |
| |||||
| d=0-31; r=0-31 | ||||||||||||
Таблица 3
| № | Операция | Мнемокод команды | Признаки результата | |||||
| H | S | V | N | Z | C | |||
| 23 | $FF→ Rd | SER Rd | ||||||
| 24 | K→ Rd | LDI Rd, K | ||||||
| 25 | (Rd)-K→ Rd | SUBI Rd, K | + | + | + | + | + | + |
| 26 | (Rd)-K-C→ Rd | SBCI Rd, K | + | + | + | + | + | + |
| 27 | (Rd)-K | CPI Rd, K | + | + | + | + | + | + |
| 28 | (Rd) ^K→ Rd | ANDI Rd, K | + | 0 | + | + | ||
| 29 |
| CBR Rd, K | + | 0 | + | + | ||
| 30 | (Rd) ˅K→ Rd | ORI Rd, K | + | 0 | + | + | ||
| 31 | (Rd) ˅K→ Rd | SBR Rd, K | + | 0 | + | + | ||
| d=16-31(!); K=0-255 | ||||||||
Таблица 4
| № | Операция | Мнемокод команды | Признаки результата | |||||
| H | S | V | N | Z | C | |||
| 32 | (Rd+1, Rd)+K→ Rd+1,Rd | ADIWRd, K | + | + | + | + | + | |
| 33 | (Rd+1,Rd)-K→ Rd+1,Rd | SBIW Rd, K | + | + | + | + | + | |
| d=24, 26, 28,30; K=0-63 | ||||||||
Похожие работы
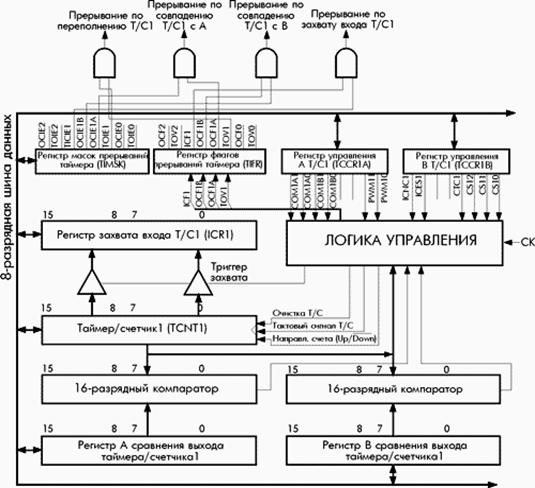
... под управлением операционных систем: FreeBSD, Linux, Microsoft Windows 2000 и выше. Принимая во внимание вышесказанное, целью данной работы является разработка информационно-обучающей программы. 2. Пограммная модель и принципы работы таймеров/счетчиков микроконтроллеров семейства AVR 2.1 Структура таймера/счетчика 16-разрядный таймер/счетчик может получать тактовый сигнал (CK), CK после ...
... Какие специализированные команды необходимо применять для опроса датчика? 2.3 Запуск и выполнение Скомпилированная программа представляет собой файл типа cof, который прошиваем на микроконтроллер ATmega 128 семейства AVR. Соединяем компоненты рабочей модели прибора, получаем сигнал с температурного датчика, считываем температуру окружающей среды. 3. Список используемой литературы ...
... данных. Эту память называют еще памятью данных. Число циклов чтения и записи в ОЗУ неограниченно, но при отключение питания вся информация теряется. Раздел 2. Среды программирования. Схемы подключения микроконтроллера Программная среда "AVR Studio" - это мощный современный программный продукт, позволяющий производить все этапы разработки программ для любых микроконтроллеров серии AVR. Пакет ...
... AVR Studio запомнит расположение окон и использует эти установки при следующем запуске проекта. 3.2. Анализ методики реализации разработки программного обеспечения 3.2.1. Классификация вариантов заданий Цель заданий – практическое освоение методики программирования на ассемблере микроконтроллеров ATMEL семейства AVR, отладка программы на симуляторе AVR Studio и программирование кристалла с помощью ...
0 комментариев