Особенности микросхемы ATtiny2313
АЛУ – арифметико-логическое устройство
Системная перепрограммируемая Flash-память программ
Использование портов для цифрового ввода-вывода
Используемые обозначения
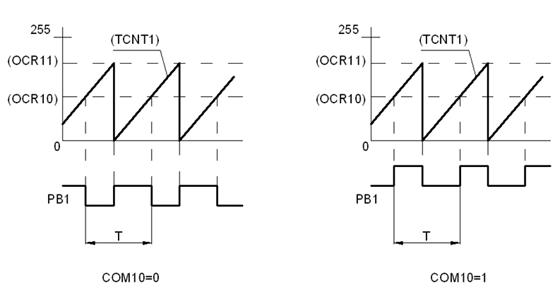
Принудительное изменение состояния выхода совпадения
Режим сброса при совпадении (СТС)
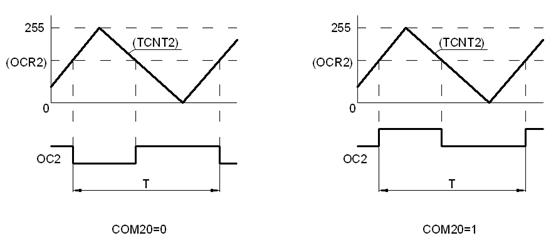
ШИМ, корректный по фазе (PhaseCorrectPWM)
Система команд
Команды регистровых операций
Команды с обращением к регистрам ввода-вывода
Навигация
Система команд
Микроконтроллеры семейства AVR фирмы Atmel
66570
знаков
14
таблиц
12
изображений
6.2 Система команд
Таблица 5
| № | Операция | Мнемокод команды | № | Операция | Мнемокод команды | |
| 34 | (Ячk) → Rd | LDS Rd, K | 35 | (Rr) →Ячk | STS k, Rr | |
| d, r=0-31; k – адрес из адресного пространства SRAM |
| |||||
Таблица 6
| № | Операция | Мнемокод команды | № | Операция | Мнемокод команды |
| 36 | (Яч(X)) → Rd | LD Rd, X | 37 | (Rr) →Яч(X) | ST X, Rr |
| 38 | (Яч(Y)) → Rd | LD Rd, Y | 39 | (Rr) →Яч(Y) | ST Y, Rr |
| 40 | (Яч(Z)) → Rd | LD Rd, Z | 41 | (Rr) →Яч(Z) | ST Z, Rr |
| 42 | 1.(Яч(X)) → Rd2. (X)+1→X | LD Rd, X+ | 43 | 1.(Rr)→Яч(X) 2.(X)+1→X | ST X+, Rr |
| 44 | 1.(Яч(Y)) → Rd2. (Y)+1→Y | LD Rd, Y+ | 45 | 1.(Rr)→Яч(Y) 2.(Y)+1→Y | ST Y+, Rr |
| 46 | 1.(Яч(Z)) → Rd2. (Z)+1→Z | LD Rd, Z+ | 47 | 1.(Rr)→Яч(Z) 2.(Z)+1→Z | ST Z+, Rr |
| 48 | 1.(X)-1→X 2. (Яч(X))→ Rd | LD Rd, -X | 49 | 1.(X)-1 →X 2.(Rr)→Яч(X) | ST -X, Rr |
| 50 | 1.(Y)-1→Y 2. (Яч(Y))→ Rd | LD Rd, -Y | 51 | 1.(Y)-1 →Y 2.(Rr)→Яч(Y) | ST -Y, Rr |
| 52 | 1.(Z)-1→Z 2. (Яч(Z))→ Rd | LD Rd, -Z | 53 | 1.(Z)-1 →Z 2.(Rr)→Яч(Z) | ST -Z, Rr |
| 54 | (Яч(Y)+q) → Rd | LDD Rd, Y+q | 55 | (Rr)→Яч(Y)+q | STDY+q, Rr |
| 56 | (Яч(Z)+q) → Rd | LDD Rd, Z+q | 57 | (Rr)→Яч(Z)+q | STDZ+q, Rr |
| 58 | 1.(SP)+1→SP 2. (СТЕК)→ Rd | POP Rd | 59 | 1.(Rr)-1→СТЕК 2.(SP)-1→SP | PUSH Rr |
| d, r = 0-31; q=0-63 | |||||
Таблица 7
| № | Операция | Мнемокод команды | № | Операция | Мнемокод команды | |
| 60 | (PrP) → Rd | IN Rd, P | 61 | (Pr) →PrP | OUT P,Pr | |
| d, r = 0-31; P=0-63=S00-$3F |
| |||||
Таблица 8
| № | Операция | Мнемокод команды | (Z.15-1) – адрес в FlashROM Z.0 = 0 – мл. байт; Z.0 =1 –ст. байт |
| 62 | (Яч(Z))→ R0 | LPM |
Таблица 9
| № | Операция | Мнемокод команды | № | Операция | Мнемокод команды | |
| 63 | T→ Rd.b | BLD Rd, b | 64 | Rr.b →T | BSTRr, b | |
| 65 | 0→ PrP.b | CBI P, b | 66 | 1→PrP.b | SBI P, b | |
| 67 | 0→ SREG.b | BLSR b | 68 | 1→SREG.b | SSET b | |
| d, r = 0-31; P=0-31 (!); b= 0-7 |
| |||||
Таблица 10
| № | Операция | Мнемокод команды | № | Операция | Мнемокод команды |
| 69 | 0→I | CLI Rd, X | 70 | 1 →I | SEI |
| 71 | 0 →T | CLT | 72 | 1 →T | SET |
| 73 | 0→H | CLH | 74 | 1 →H | SEH |
| 75 | 0→S | CLS | 76 | 1→S | SES |
| 77 | 0→V | CLV | 78 | 1→V | SEV |
| 79 | 0→N | CLN | 80 | 1→N | SEN |
| 81 | 0→Z | CLZ | 82 | 1→Z | SEZ |
| 83 | 0→C | CLC | 84 | 1→C | SEC |
Таблица 11
| № | Операция | Мнемокод команды | № | Операция | Мнемокод команды | |
| 85 | (PC)+1+k→PC | RJMP k | 86 | (Z) →PC | IJMP | |
| 87 | (PC)+→СТЕК (SP)-2→SP (PC)+1+k→PC | RCALL k | 88 | (PC)+1→СТЕК (SP)-2→SP (Z) →PC | ICALL | |
| 89 | (SP)+2→ SP (СТЕК) →PC | RET | 90 | (SP)+2→SP (СТЕК) →PC 1→I | RETI | |
| k= -2048 - +2047 |
| |||||
Таблица 12
| № | Условие | Мнемокод команды | № | Условие | Мнемокод команды |
| 91 | I = 0 | BRID k | 92 | I = 1 | BRIE k |
| 93 | T = 0 | BRTC k | 94 | T = 1 | BRTS k |
| 95 | H = 0 | BRHC k | 96 | H = 1 | BRHS k |
| 97 | S = 02. (X)+1→X | BRGE k | 98 | S = 1 | BRLT k |
| 99 | V = 0 | BRVC | 100 | V = 1 | BRVS k |
| 101 | N = 0 | BRPL k | 102 | N = 1 | BRMI k |
| 103 | Z = 0 | BRNE k | 104 | Z = 1 | BREQ k |
| 105 | C = 0 | BRCC k | 106 | C = 1 | BRCS k |
| 107 | C = 0 | BRSH k | 108 | C = 1 | BRLO k |
| 109 | SREG.b = 0 | BRBC b, k | 110 | SREG.b = 1 | BRBS b, k |
| k= -64 - +63; b = 0 - 7 | |||||
Таблица 13
| № | Условие | Мнемокод команды | № | Условие | Мнемокод команды |
| 111 | Rr.b = 0 | SBRC Rr, b | 112 | Rrb = 1 | SBRS Rr, b |
| 113 | PrP.b = 0 | SBIC P, b | 114 | PrP.b = 1 | SPIS P, b |
| 115 | (Rd) = (Rr) | CPSE Rd, Rr | |||
| d, r= 0 – 31; P = 0 – 31 (!); b = 0 - 7 | |||||
Таблица 14
| № | Операция | Мнемокод команды |
| 116 | MK → режим энергосбережения | SLEEP |
| 117 | Перезапуск WDT | WDR |
| 118 | Нет | NOP |
Похожие работы
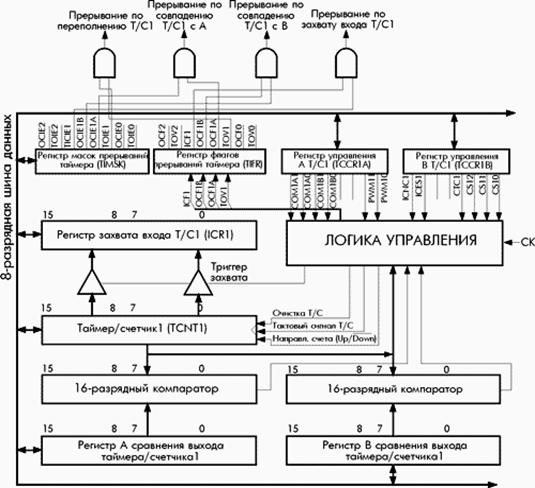
... под управлением операционных систем: FreeBSD, Linux, Microsoft Windows 2000 и выше. Принимая во внимание вышесказанное, целью данной работы является разработка информационно-обучающей программы. 2. Пограммная модель и принципы работы таймеров/счетчиков микроконтроллеров семейства AVR 2.1 Структура таймера/счетчика 16-разрядный таймер/счетчик может получать тактовый сигнал (CK), CK после ...
... Какие специализированные команды необходимо применять для опроса датчика? 2.3 Запуск и выполнение Скомпилированная программа представляет собой файл типа cof, который прошиваем на микроконтроллер ATmega 128 семейства AVR. Соединяем компоненты рабочей модели прибора, получаем сигнал с температурного датчика, считываем температуру окружающей среды. 3. Список используемой литературы ...
... данных. Эту память называют еще памятью данных. Число циклов чтения и записи в ОЗУ неограниченно, но при отключение питания вся информация теряется. Раздел 2. Среды программирования. Схемы подключения микроконтроллера Программная среда "AVR Studio" - это мощный современный программный продукт, позволяющий производить все этапы разработки программ для любых микроконтроллеров серии AVR. Пакет ...
... AVR Studio запомнит расположение окон и использует эти установки при следующем запуске проекта. 3.2. Анализ методики реализации разработки программного обеспечения 3.2.1. Классификация вариантов заданий Цель заданий – практическое освоение методики программирования на ассемблере микроконтроллеров ATMEL семейства AVR, отладка программы на симуляторе AVR Studio и программирование кристалла с помощью ...
0 комментариев