Навигация
Неявні інтерполяційні схеми
27789
знаков
1
таблица
13
изображений
6. Неявні інтерполяційні схеми
Алгоритм неявних інтерполяційних методів дослівно повторює алгоритм звичайних (явних) інтерполяційних методів. Єдина відмінність полягає в тому, що ми не використовуємо звичайну (явну) схему Рунге-Кутта другого порядку:
Ми заміняємо її на неявну схему Рунге-Кутта другого порядку:
![]()
Нагадаємо, що для цієї схеми можна використовувати два різних рецепта:
• шукати точне рішення цієї системи нелінійних рівнянь методом Ньютона;
• обмежитися лінеаризованим рівнянням, тобто зробити тільки перший крок методу Ньютона :

У будь-якому випадку доведеться вирішувати СЛР. В більшості випадків можна обійтись другим варіантом, але в дуже нестійких завданнях доведеться вдатися до першого (до речі, при цьому не доведеться сильно міняти текст програми).
Нагадаємо, що існують варіанти інтерполяційного методу з фіксованим кроком Н і змінним порядком m, з фіксованому порядку те і змінним кроком Н і, нарешті, із змінними m і Н. Тут можна привечти тільки простий алгоритм з фіксованим H.
Алгоритм:
Вибираємо постійний крок H за часом (як правило слід брати H близько 0.2). Рухаємося по траєкторії з цим кроком. Кожен окремий крок реалізується так:
Для k = 1,2,.. виконуємо наступне:
Для чергового Nkз набору {4, 6, 8, 12, 16, 24, 32, 48, 64, 96, 128} обчислюємо крок hk = H/Nk.
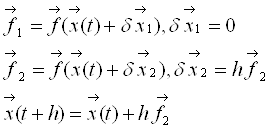
За допомогою цього кроку hk знаходимо ![]()

тут tn = t+nhk, n = 0.. Nk-1; при цьому ![]() . Зрозуміло, тут не слід обчислювати зворотну матрицю, потрібно просто вирішувати СЛР.
. Зрозуміло, тут не слід обчислювати зворотну матрицю, потрібно просто вирішувати СЛР.
Для кожного хі по k точок:
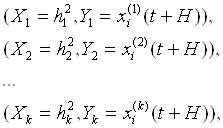
виконуємо поліноміальну інтерполяцію взалежності Y(X) в точку X = 0. Результат інтерполяції, отриманий на k -му етапі, означаємо ![]()
![]() . Оцінюємо погрішність
. Оцінюємо погрішність
![]() як
як ![]()
Перетворюємо вектор ![]() на число
на число ![]() характеризуючи погрішність. Якщо
характеризуючи погрішність. Якщо ![]() менше замовленого
менше замовленого ![]() те вважаємо
те вважаємо ![]() і завершуємо даний крок t→t+H.
і завершуємо даний крок t→t+H.
Перша неприємна відмінність від явного методу полягає в тому, що кожен маленький крок на hk (великий крок H складається з Nk штук таких кроків) вимагає рішення СЛР.
Друга неприємна відмінність від явного методу полягає в тому, що тут набагато складніше перетворити вектор ![]() на одне число
на одне число ![]() , оцінюючи погрішність. На жаль, рецепт цього перетворення слідує підібрати залежно від конкретного завдання, тобто від конкретних властивостей "швидких" і "повільних" змінних.
, оцінюючи погрішність. На жаль, рецепт цього перетворення слідує підібрати залежно від конкретного завдання, тобто від конкретних властивостей "швидких" і "повільних" змінних.
На перший погляд, цей алгоритм приведе не просто до багатьох помилок в описі динаміки "швидких" змінних, а до помилок якісних. Дійсно, якщо рівняння для "швидкої" змінної має вигляд ![]() , то при Ch>>1 неявна схема Рунге-Кутта другого порядку замість експоненціального вибуває дає x(t+h)≈-x(t), тобто |x(t+H)|≈|x(t)|. На щастя, наступна інтерполяція виправляє ситуацію. Інтерполяційний алгоритм "помічає", що у міру зменшення hkабсолютна величина x(k)(t+H) зменшується. Причому це зменшення тим помітніше, чим менше hk - В результаті остаточна відповідь
, то при Ch>>1 неявна схема Рунге-Кутта другого порядку замість експоненціального вибуває дає x(t+h)≈-x(t), тобто |x(t+H)|≈|x(t)|. На щастя, наступна інтерполяція виправляє ситуацію. Інтерполяційний алгоритм "помічає", що у міру зменшення hkабсолютна величина x(k)(t+H) зменшується. Причому це зменшення тим помітніше, чим менше hk - В результаті остаточна відповідь ![]() буде помітна менше за абсолютною величиною, чим x(t).
буде помітна менше за абсолютною величиною, чим x(t).
7. Програма Рунге-Кутта на мові С#
Наведемо приклад пограми Рунге-Кутта на мові С#. В програмі використовується абстрактний клас TrungeKutta, в якому потрібно перекрити абстрактний метод F, який задає перші чаcтини рівняння.
using System;
using System.Collections.Generic;
namespace rwsh_rk4
{
abstract class TRungeKutta
{
public int N;
double t; // теперішній час
public double[] Y; // шукане число Y[0] – саме рішення, Y[i] - i-та змінна розвязку
double[] YY, Y1, Y2, Y3, Y4; // внутрішня змінна
public TRungeKutta(int N) // N – розмір системи
{
this.N = N; // зберегти розміри системи
if (N < 1)
{
this.N = -1; // якщо розмірність менше одиниці, то установити флаг помилки
return; // і вийти із конструктора
}
Y = new double[N]; // створення вектора розв’язку
YY = new double[N]; // внутрішній розв’язок
Y1 = new double[N];
Y2 = new double[N];
Y3 = new double[N];
Y4 = new double[N];
}
public void SetInit(double t0, double[] Y0) // встановлення початкових умов.
{ // t0 – початковий час, Y0 – початкова умова
t = t0;
int i;
for (i = 0; i < N; i++)
{
Y[i] = Y0[i];
}
}
public double GetCurrent() // повернути даний час
{
return t;
}
abstract public void F(double t, double[] Y, ref double[] FY); // перші частини с-ми.
public void NextStep(double dt) // наступний крок метода Рунге-Кутта, dt – крок по часу
{
if(dt<0)
{
return;
}
int i;
F(t, Y, ref Y1); // вирахувати Y1
for (i = 0; i < N; i++)
{
YY[i] = Y[i] + Y1[i] * (dt / 2.0);
}
F(t + dt / 2.0, YY, ref Y2);
for (i = 0; i < N; i++)
{
YY[i] = Y[i] + Y2[i] * (dt / 2.0);
}
F(t + dt / 2.0, YY, ref Y3); // вирахувати Y3
for (i = 0; i < N; i++)
{
YY[i] = Y[i] + Y3[i] * dt;
}
F(t + dt, YY, ref Y4); // вирахувати Y4
for (i = 0; i < N; i++)
{
Y[i] = Y[i] + dt / 6.0 * (Y1[i] + 2.0 * Y2[i] + 2.0 * Y3[i] + Y4[i]); // виразувати р-зок на новому кроці
}
t = t + dt; // збільшити крок
}
}
class TMyRK : TRungeKutta
{
public TMyRK(int aN) : base(aN) { }
public override void F(double t, double[] Y, ref double[] FY)
{
FY[0] = Y[1]; // приклад математичний маятник
FY[1] = -Y[0]; // y''(t)+y(t)=0
}
}
class Program
{
static void Main(string[] args)
{
TMyRK RK4 = new TMyRK(2);
double[] Y0 = {0, 1}; // задаємо початкові умови y(0)=0, y'(0)=1
RK4.SetInit(0, Y0);
while (RK4.GetCurrent() < 10) // розв’язуєм до 10
{
Console.WriteLine("{0}\t{1}\t{2}", RK4.GetCurrent(), RK4.Y[0], RK4.Y[1]); // вивести t, y, y'
RK4.NextStep(0.01); // розв’язати на наступному кроці, крок інтегрування dt=0.01
}
}
}
}
Похожие работы
... і, перебудову управлінської ієрархії), систем планування, контролю, оцінки діяльності персоналу, його винагороди. Подібні корінні перебудови - результат явної невідповідності стратегії і структури. Досвід внутрішньо фірмового управління 1950-1970-х років, коли жорсткість формалізованих, бюрократичних структур, очевидно, суперечила збільшеній динаміці змін зовнішнього середовища, показав, що часті ...



... коштів є важливим чинником у зниженні собівартості продукції чи виконаної роботи. Раціональне використання оборотних коштів залежить від правильного їхнього формування і ефективної організації виробництва. Зосередження н підприємствах зайвих оборотних коштів приводить до їхнього заморожування. Це завдає шкоди економіці господарства. Щоб уникнути такого положення, оборотні кошти нормуються, що є ...
... іонери. Залежно від стилю керівництва й політичної системи, в якій функціонує лідер, відрізняють: диктаторський тип, демократичний тип, автократичний тип, плутократичний тип. В сучасній політології використовується типологія М. Дж. Херманн, де за основу виступає імідж, “образ”, візуальна привабливість лідера: прапороносець, який має особистий погляд на реальність, майбутнє; чітко викладає цілі, ...
... ї моделі економіки і способів її побудови; на визначенні пріоритетних цінностей та економічного порядку, який повинен забезпечувати реалізацію цієї моделі. Тому розроблення філософії взаємодії держави і ринку передбачає дослідження багатогранності цього процесу, урахування впливу інституційного середовища на конкретну модель економіки. Без визначення цілей, цінностей у суспільстві неможливо ...
0 комментариев