Навигация
Структурный и кинематический анализ рычажного механизма
6418
знаков
1
таблица
7
изображений
Провести структурный анализ рычажного механизма:
- количество подвижных звеньев и пар;
- класс пар;
- степень подвижности механизма;
- количество структурных групп, их класс и класс механизма.
Провести кинематический анализ рычажного механизма:
- построить план скоростей для заданного положения механизма;
- определить скорость в точке С;
- построить план ускорений механизма;
- определить ускорение в точке С.
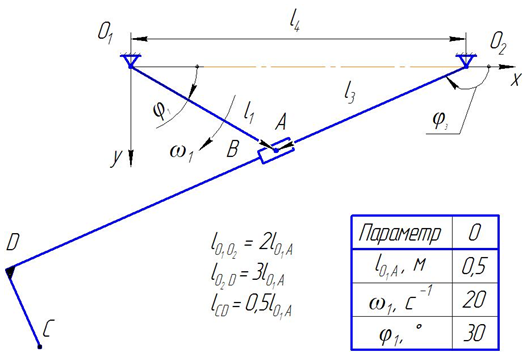
Рис. 1 Рычажный механизм
1. Структурный анализ рычажного механизма
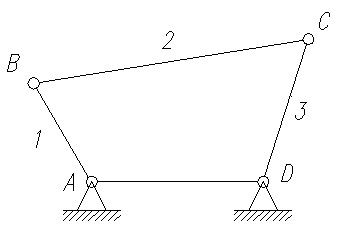
Изобразим на рис. 2 кинематическую схему шарнирного механизма, пронумеруем звенья механизма. Условные обозначения звеньев механизма приведены в табл. 1. В табл. 2 приведены кинематические пары рычажного механизма, их обозначение на схеме, класс и название.
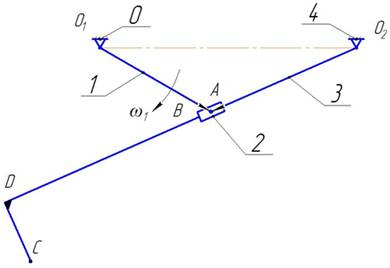
Рис. 2 Кинематическая схема рычажного механизма.
Таблица 1. Условные обозначения звеньев механизма (рис. 2)
| Условные обозначения | 0 | 1 | 2 | 3 | 4 |
| Название звена | стойка | кривошип | ползун | кулиса | стойка |
Степень подвижности механизма
![]() ,
,
где n – количество подвижных звеньев, n = 3;
Р5 – количество пар пятого класса, Р5 = 4.
Составим структурные группы механизма и определим их класс и порядок:
а) стойка 0 - кривошип 1 – механизм I класса, начальный механизм (рис. 3)
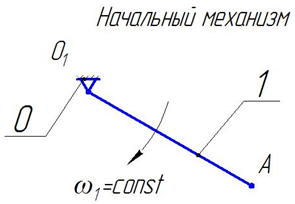
Рис. 3 Механизм I класса (0;1)
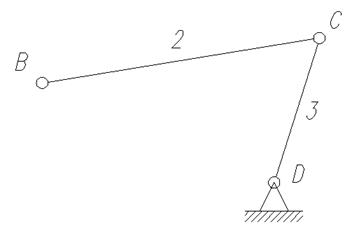
б) ползун 2 – кулиса 3 – двухповодковая группа Ассура 3 вида (ВПВ) (рис. 4)
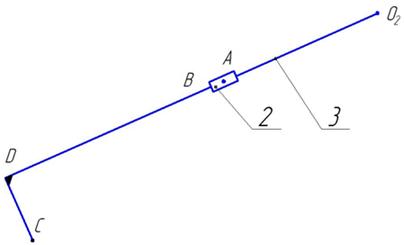
Рис. 4 2ПГ 3 вида (2;3)
Таким образом, исследуемый механизм, обладающий одной степенью подвижности (W = 1), можем рассматривать как образованный путем последовательного присоединения к стойке 0 и ведущему звену 1 одной группы, состоящей из звеньев 2,3. По классификации И.И. Артоболевского он должен быть отнесен к механизмам II класса.
Формула строения механизма
I(0;1)→II3(2;3).
2. Синтез механизма
Длина кривошипа О1А задана: ![]() 0,5 м.
0,5 м.
Определим длину кулисы О2D:
![]()
Расстояние O1O2:
![]()
Расстояние CD:
![]()
По найденным значениям длин механизма, строим план положения механизма. Масштабный коэффициент длины рассчитываем по формуле:
где ![]() – действительная длина кривошипа О1А,
– действительная длина кривошипа О1А, ![]() 0,5 м;
0,5 м;
![]() – масштабная длина кривошипа О1А, принимаем
– масштабная длина кривошипа О1А, принимаем ![]() = 50 мм.
= 50 мм.
Масштабная длина кулисы О2D:
![]()
Масштабное расстояние [![]() ]:
]:
![]()
Масштабное расстояние [lCD]:
![]()
Методом засечек в принятом масштабе µ строим план положения механизма для заданного положения кривошипа О1А, φ1 = 30° (рис. 5).
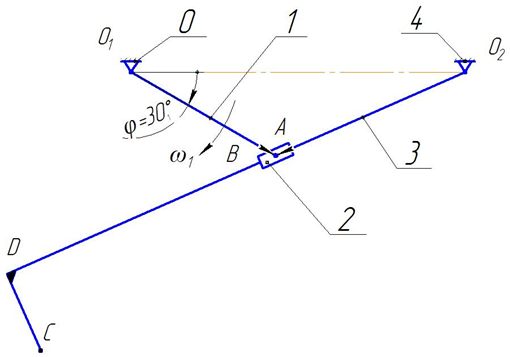
Рис. 5 План положения механизма, µ = 0,01 м/мм
Похожие работы
... механизма для обеспечения эффективного перехода на различные способы транспортирования в зависимости от свойств материала и выполняемой технологической операции. Разработке методов кинематического анализа механизмов транспортирования ткани швейных машин и соответствующего этой задаче алгоритмического и программного обеспечения посвящены работы. [67],[71],[72]. В работе Ю.Ю.Щербаня и В.А.Горобца ...
... 3 КИНЕМАТИЧЕСКИЙ АНАЛИЗ Положение 1 Положение 2 Положение 3 Положение 4 Положение 5 Положение 6 Сводная таблица результатов кинематического анализа 4 СИЛОВОЙ АНАЛИЗ Силовой анализ рычажного механизма методом планов сил Силовой анализ рычажного механизма методом Жуковского СПИСОК ЛИТЕРАТУРЫ 1 СТРУКТУРНЫЙ АНАЛИЗ Схема рычажного механизма По структурной формуле Чебышева для ...
... будет кратной числу сателлитов. где С – любое целое положительное число. Условие сборки выполняется. Таким образом, планетарная часть заданного зубчатого механизма удовлетворяет всем требованиям проектирования. 3 Силовой расчет рычажного механизма Вариант 20 Исходные данные: LOA= 0.2 LAB= 0.6 LBC= 0.5 LСD= 0.2 LDE= 0.7 LAS2= 0.2 LCS3= 0.1 LDS4= 0.3 ...
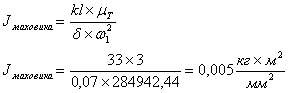
... этого отрезка в миллиметрах вычислим момент инерции маховика. Углы вычисляем по формулам: Проводим вычисления и находим: Проводим касательные и измеряем длину отрезка KL. 3. Динамический анализ рычажного механизма 3.1 Построение планов скоростей и ускорений в заданном положении Вычертим кинематическую схему механизма в заданном положении градусов. При построении ...
0 комментариев