Навигация
Дослідження двовимірної квадратичної стаціонарної системи із двома приватними інтегралами у вигляді кривих другого порядку
23797
знаков
3
таблицы
3
изображения
Дипломна робота
Дослідження двовимірної квадратичної стаціонарної системи із двома приватними інтегралами у вигляді кривих другого порядку
Зміст
Введення
1. Побудова квадратичних двовимірних стаціонарних систем
1.1 Побудова квадратичної двовимірної стаціонарної системи із приватним інтегралом у вигляді параболи
1.2 Побудова квадратичної двовимірної стаціонарної системи із приватним інтегралом у вигляді окружності або гіперболи
1.3 Необхідні й достатні умови існування в системи (1.1) двох часток інтегралів (1.3), (1.13)
2. Якісне дослідження побудованих класів систем
2.1 Дослідження системи (1.1) з коефіцієнтами, заданими формулами (1.28) - (1.31)
2.2 Дослідження системи (1.1) з коефіцієнтами, заданими формулами (1.41) - (1.42)
2.3 Дослідження системи (1.1) з коефіцієнтами, заданими формулами (1.52) - (1.53)
Висновок
Список джерел
Додатки
Реферат
Дипломна робота ____ сторінок, 11 джерел.
Ключові слова й словосполучення: квадратична двовимірна стаціонарна система, приватний інтеграл, парабола, гіпербола, окружність, крапка, характеристичне рівняння, характеристичне число, вузол, сідло, фокус.
Дана робота містить результати досліджень автора, що ставляться до якісного дослідження в цілому двовимірної квадратичної стаціонарної системи.
Основним інструментом досліджень є поняття приватного інтеграла.
Робота складається із двох глав.
У першому розділі проводиться побудова квадратичних двовимірних стаціонарних систем із заданими інтегралами, при цьому коефіцієнти інтегралів виражаються через коефіцієнти системи, а коефіцієнти системи зв'язані між собою трьома співвідношеннями.
У другому розділі проводиться якісне дослідження в цілому виділених у першому розділі класів систем при фіксованих значеннях деяких параметрів.
Введення
Відомо, що в елементарних функціях і навіть у квадратурах інтегруються далеко не всі класи диференціальних рівнянь. У зв'язку із цим з'явилася необхідність у створенні такої теорії, за допомогою якої можна було б вивчати властивості рішень диференціальних рівнянь по виду самих рівнянь. Такою теорією, поряд з аналітичної, і є якісна теорія диференціальних рівнянь.
Уперше задача якісного дослідження для найпростішого випадку системи двох диференціальних рівнянь із повною виразністю була поставлена А. Пуанкаре [7]. Пізніше дослідження А. Пуанкаре були доповнені И. Бендиксоном [3, с. 191-211] і уточнені Дж.Д. Биркгофом [4, с.175-179].
 (0.1)
(0.1)
Однієї із задач якісної теорії диференціальних рівнянь є вивчення поводження траєкторій динамічної системи (0.1) на фазовій площині в цілому у випадку, коли P (x,y) і Q (x,y) - аналітичні функції. Інтерес до вивчення цієї системи або відповідного їй рівняння пояснюється їх безпосереднім практичним застосуванням у різних областях фізики й техніки.
![]() (0.2)
(0.2)
Є багато робіт, у яких динамічні системи вивчалися в припущенні, що їхніми частками інтегралами є алгебраїчні криві. Поштовхом до більшості з них послужила робота Н.П. Еругина [6, с.659 - 670], у якій він дав спосіб побудови систем диференціальних рівнянь, що мають як свій приватний інтеграл криву заданого виду.
Знання одного приватного алгебраїчного інтеграла системи (0.1) у багатьох випадках допомагає побудувати повну якісну картину поводження інтегральних кривих у цілому. Відзначимо ряд робіт цього характеру для систем (0.1), у яких P (x,y) і Q (x,y) - поліноми другого ступеня.
Н.Н. Баутиним [1, с.181 - 196] і Н.Н. Серебряковою [8, с.160 - 166] повністю досліджений характер поводження траєкторій системи (0.1), що має два алгебраїчних інтеграли у вигляді прямих. В [10, с.732 - 735] Л.А. Черкасом таке дослідження проведене для рівняння (0.2) при наявності приватного інтеграла у вигляді кривої третього порядку. Яблонський А.И. [11, с.1752 - 1760] і Филипцов В.Ф. [9, с.469-476] вивчали квадратичні системи із припущенням, що приватним інтегралом були алгебраїчні криві четвертого порядку.
У даній роботі розглядається система
 (0.3)
(0.3)
і проводиться якісне дослідження в цілому системи (0.3) за умови, що приватним інтегралом є крива четвертого порядку, що розпадається на дві криві другого порядку, одна й з яких парабола, друга окружність або гіпербола.
Робота складається із двох глав.
У першому розділі проводиться побудова квадратичних двовимірних стаціонарних систем із заданими інтегралами, при цьому коефіцієнти інтегралів виражаються через коефіцієнти системи, а коефіцієнти системи зв'язані між собою трьома співвідношеннями.
У другому розділі проводиться якісне дослідження в цілому виділених у першому розділі класів систем при фіксованих значеннях деяких параметрів.
1. Побудова квадратичних двовимірних стаціонарних систем 1.1 Побудова квадратичної двовимірної стаціонарної системи із приватним інтегралом у вигляді параболи
Розглянемо систему диференціальних рівнянь
(1.1)
Нехай система (1.1) має приватний інтеграл виду:
![]() , (1.2)
, (1.2)
де Fk (x,y) - однорідні поліноми від x і y ступеня k.
Як приватний інтеграл (1.2) візьмемо параболу виду:
F (x,y) (y+ (1 x2 + (2 x+ (3 = 0 (1.3)
Будемо припускати, що (3 (0, тобто парабола не проходить через початок координат.
Згідно [10, с.1752-1760] для інтеграла (1.3) системи (1.1) має місце співвідношення:
![]()
![]()
![]() , (1.4)
, (1.4)
де L (x,y) = px+my+n, p, m, n - постійні.
Тоді випливаючи формулі (1.4) одержимо рівність:
(2 (1x+ (2) (ax+by+a1x2+2b1xy+c1y2) + (cx+dy+a2x2+2b2xy+c2y2) = (y+ (1x2+ (2x+ (3) (px+my+n).
Дорівнюючи коефіцієнти при однакових ступенях xm yn ліворуч і праворуч, одержимо рівності:
(2a1-p) (1= 0 (1.51), (4b1-m) (1= 0 (1.52), 2 (1c1= 0 (1.53)
(2a-n) (1+ (a1-p) (2+a2= 0 (1.61)
2 (1b+ (2b1-m) (2+2b2+p= 0 (1.62)
(2c1+c2-m= 0 (1.63), (a-n) (2-p (3n+c= 0 (1.71)
(2b- (3m+d-n= 0 (1.72), (3n= 0 (1.73)
Нехай (1 (0, тоді з рівностей (1.51), (1.52), (1.53), (1.63) і (1.73) одержуємо, що
P=2a1, m=4b1, c1=0, c2=4b1, n=0 (1.8)
Зі співвідношень (1.61), (1.62) і (1.71) знайдемо вираження коефіцієнтів кривій (1.3) через коефіцієнти системи (1.1) у наступному виді:
a1![]() , (1.9)
, (1.9)
a2![]() , (1.10)
, (1.10)
a3. ![]() (1.11)
(1.11)
Рівність (1.72) з урахуванням отриманих виражень (1.9) - (1.11), дасть умову, що зв'язує коефіцієнти a, b, c, d, a1, a2, b1, b2:
![]() (1.12)
(1.12)
Отже, установлена наступна теорема:
Теорема 1.1 Система (1.1) має приватний інтеграл (1.3), коефіцієнти якого виражаються формулами (1.9) - (1.11), за умови, що коефіцієнти системи зв'язані співвідношенням (1.12) і c1= 0, c2= 4b1, a1 (0, 2b1a-a1b (0.
1.2 Побудова квадратичної двовимірної стаціонарної системи із приватним інтегралом у вигляді окружності або гіперболи
Нехай тепер система (1.1) поряд з інтегралом (1.3) має інтеграл у вигляді:
y2+ (x2+ (x+ (y+ (=0 (1.13)
Будемо розглядати тепер систему:
 (1.14)
(1.14)
Відповідно до формули (1.4), де L
(x,y) = m1x+n1y+p1,m1, n1, p1 - постійні для системи (1.1), маємо:
(2a1-m1) (2= 0 (1.151)
(4b1-n1) (+2a1= 0 (1.152)
m1= 4b2 (1.153)
n1=8b1 (1.154)
(2a-p1) (+ (a1-m1) (+a2 (=0 (1.161)
2b (+ (2b1-n1) (+ (2b2-m1) (+2c= 0 (1.162)
(4b1-n1) (+2d-p1= 0 (1.163)
(a-p1) (+c (+m1 (= 0 (1.171)
b (+ (d-p1) (-n1 (= 0 (1.172)
p1 (= 0 (1.173)
Припустимо, що крива не проходить через початок координат, тобто ( (0.Нехай ( (0, тоді з рівностей (1.151), (1.153), (1.154) і (1.173) одержуємо, що
m1=4b2, n1=8b1, a1=2b2, p1=0 (1.18)
А зі співвідношень (1.161), (1.163) і (1.171) знайдемо вираження коефіцієнтів кривій (1.13) через коефіцієнти системи (1.1) у наступному виді:
![]() (1.19),
(1.19), ![]() (1.20)
(1.20)
![]() (1.21),
(1.21), ![]() (1.22)
(1.22)
Підставляючи коефіцієнти (, (, (і (у рівності (1.162) і (1.172), одержимо дві умови, що зв'язують коефіцієнти a, b, c, d, a2, b1, b2:
![]() (1.23)
(1.23)
![]() (1.24)
(1.24)
Отже, установлена наступна теорема:
Теорема 1.2 Система (1.14) має приватний інтеграл (1.13), коефіцієнти якого виражаються формулами (1.19) - (1.22), за умови, що коефіцієнти системи зв'язані співвідношеннями (1.23), (1.24) і b1 (0, b2 (0, a1=2b2.
1.3 Необхідні й достатні умови існування в системи (1.1) двох часток інтегралів (1.3), (1.13)У розділах 1.1-1.2 ми одержали, що система (1.1) буде мати дві частки інтеграла у вигляді кривих другого порядку за умови, що коефіцієнти системи зв'язані співвідношеннями:
![]()
![]() (1.25)
(1.25)
![]()
Причому b1 (0, b2 (0, a1 (0, b1a-b2b (0.
Виражаючи c з першого рівняння системи (1.25), одержимо
![]() (1.26)
(1.26)
Підставимо (1.26) у друге й третє рівняння системи (1.25).
Одержимо два співвідношення, що зв'язують параметри a, b, d, a2, b1, b2:
 .
.
Нехай ![]() і
і
 (1.27)
(1.27)
З першого рівняння системи (1.27) одержимо
![]()
Підставляючи ![]() в друге рівняння системи (1.27), знайдемо
в друге рівняння системи (1.27), знайдемо
![]() .
.
Зі співвідношень (1.25) при умовах (1.27) одержуємо, що коефіцієнти системи (1.1) визначаються наступними формулами:
![]() (1.28)
(1.28)
![]() (1.29)
(1.29)
![]() (1.30)
(1.30)
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() (1.31)
(1.31)
Рівності (1.9) - (1.11), (1.19) - (1.22) за умови, що мають місце формули (1.28) - (1.31), дадуть наступні вираження для коефіцієнтів інтегралів (1.3) і (1.13):
a1![]() (1.32)
(1.32)
a2![]() (1.33)
(1.33)
a3![]() (1.34)
(1.34)
s![]() (1.35)
(1.35)
b![]() (1.36)
(1.36)
g![]() (1.37)
(1.37)
d![]() (1.38)
(1.38)
Теорема 1.3 Система (1.1) має приватні інтеграли виду (1.3) і (1.13) з коефіцієнтами, певними формулами (1.32) - (1.38), за умови, що коефіцієнти системи (1.1) виражаються через параметри по формулах (1.28) - (1.31).
Нехай
 (1.39)
(1.39)
З першого рівняння системи (1.39) знайдемо
![]() ,
, ![]() .
.
Підставляючи ![]() в друге рівняння системи (1.39), одержимо рівність:
в друге рівняння системи (1.39), одержимо рівність:
![]() (1.40)
(1.40)
Оскільки ![]() , те розглянемо два випадки:
, те розглянемо два випадки: ![]() , тоді
, тоді ![]() .
.
Зі співвідношень (1.25) при умовах (1.39) і (1.40) одержуємо, що коефіцієнти системи (1.1) визначаються наступними формулами:
![]() ,
, ![]() ,
, ![]() (1.41)
(1.41)
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() (1.42)
(1.42)
Рівності (1.9) - (1.11), (1.19) - (1.22) за умови, що мають місце формули (1.41) - (1.42), дадуть наступні вираження для коефіцієнтів інтегралів (1.3) і (1.13):
a1![]() (1.43),a2
(1.43),a2![]() (1.44)
(1.44)
a3![]() (1.45), s
(1.45), s![]() (1.46)
(1.46)
(=0 (1.47)
g![]() (1.48),
(1.48),
d![]() (1.49)
(1.49)
Теорема 1.4 Система (1.1) має приватні інтеграли виду (1.3) і (1.13) з коефіцієнтами, певними формулами (1.43) - (1.49), за умови, що коефіцієнти системи (1.1) виражаються через параметри по формулах (1.41) - (1.42).
б) ![]() (1.50),
(1.50),![]() (1.51)
(1.51)
З (1.50) знайдемо ![]() :
:
![]()
Зі співвідношень (1.25) при умовах (1.39) і (1.50) - (1.51) одержуємо, що коефіцієнти системи (1.1) визначаються наступними формулами:
![]() ,
, ![]() - будь-яке число,
- будь-яке число, ![]() (1.52)
(1.52)
![]() ,
, ![]() ,
, ![]() ,
, ![]()
![]() ,
, ![]() (1.53)
(1.53)
Рівності (1.9) - (1.11) і (1.19) - (1.22) за умови, що мають місце формули (1.52) - (1.53), дадуть наступні вираження для коефіцієнтів інтегралів (1.3) і (1.13):
(1=0 (1.54), a2![]() (1.55)
(1.55)
a![]()
![]() (1.56)
(1.56)
s![]() (1.57)
(1.57)
b![]() (1.58)
(1.58)
g![]() (1.59)
(1.59)
d![]() (1.60)
(1.60)
Теорема 1.5 Система (1.1) має приватні інтеграли виду (1.3) і (1.13) з коефіцієнтами, певними формулами (1.54) - (1.60), за умови, що коефіцієнти системи (1.1) виражаються через параметри по формулах (1.52) - (1.53).
2. Якісне дослідження побудованих класів систем 2.1 Дослідження системи (1.1) з коефіцієнтами, заданими формулами (1.28) - (1.31)
Будемо проводити наше дослідження в припущенні, що ![]() ,
, ![]() ,
, ![]() .
.
Нехай ми маємо систему (1.1), коефіцієнти якої визначаються відповідно до формул (1.28) - (1.31), тоді система (1.1) запишеться у вигляді:
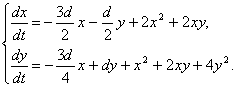 (2.1)
(2.1)
Інтегральні криві в цьому випадку мають вигляд:
![]() (2.2)
(2.2)
 (2.3)
(2.3)
Знайдемо стани рівноваги системи (2.1). Дорівнявши праві частини системи нулю й виключивши змінну y, одержимо наступне рівняння для визначення абсцис станів рівноваги:
![]() (2.4)
(2.4)
З (2.4) одержуємо, що
![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Ординати крапок спокою мають вигляд:
![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Отже, маємо крапки
![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Досліджуємо поводження траєкторій на околицях станів рівноваги ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
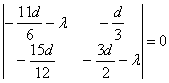
Досліджуємо крапку ![]() .
.
Складемо характеристичне рівняння в крапці ![]() .
.
Звідси
![]() ,
, ![]() (2.5)
(2.5)
![]() ,
, ![]()
Отже, характеристичне рівняння прийме вид:
 =
= =0.
=0.
![]() ,
,
Або
![]() .
.
Характеристичними числами для крапки![]() системи (2.1) будуть
системи (2.1) будуть
![]() .
.
Коріння ![]() - дійсні, різних знаків не залежно від параметра d. Отже, крапка
- дійсні, різних знаків не залежно від параметра d. Отже, крапка ![]() - сідло.
- сідло.
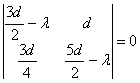
Досліджуємо крапку
![]() .
.
Складемо характеристичне рівняння в крапці
![]() .
.
Згідно
рівностям (2.5) характеристичне рівняння прийме вид:
![]() ,
,
Або
![]() .
.
Характеристичними числами для крапки ![]() системи (2.1) будуть
системи (2.1) будуть
![]() ,
,
тобто
![]() ,
, ![]() .
.
Коріння ![]() - дійсні й одного знака, що залежать від параметра d. Якщо d (0, то крапка
- дійсні й одного знака, що залежать від параметра d. Якщо d (0, то крапка ![]() - нестійкий вузол, якщо d (0, то крапка
- нестійкий вузол, якщо d (0, то крапка ![]() - стійкий вузол. Досліджуємо крапку
- стійкий вузол. Досліджуємо крапку ![]() .
.
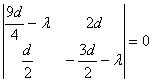
Застосовуючи рівності (2.5), складемо характеристичне рівняння в крапці
![]() :
:
![]()
Характеристичними числами для крапки
![]()
системи (2.1) будуть ![]() , тобто
, тобто ![]() ,
, ![]() . Коріння
. Коріння ![]() - дійсні й одного знака, що залежать від параметра d. Якщо d<0, то крапка
- дійсні й одного знака, що залежать від параметра d. Якщо d<0, то крапка ![]() - стійкий вузол, якщо d>0, то крапка
- стійкий вузол, якщо d>0, то крапка ![]() - нестійкий вузол.
- нестійкий вузол.
Досліджуємо крапку
![]() .
.
Складемо характеристичне рівняння в крапці
![]() .
.
Застосовуючи рівності (2.5), одержимо:
![]() ,
,
Або
![]()
Характеристичними числами для крапки
![]()
системи (2.1) будуть
![]() ,
,
тобто
![]() ,
, ![]() .
.
Коріння ![]() - дійсні й різні знаки не залежно від параметра d. Виходить, крапка
- дійсні й різні знаки не залежно від параметра d. Виходить, крапка ![]() - сідло.
- сідло.
Досліджуємо нескінченно - вилучену частину площини наприкінці осі oy. Перетворення
![]() [7]
[7]
переводить систему (2.1) у систему:
 (2.6)
(2.6)
де ![]() .
.
Для дослідження станів рівноваги на кінцях осі y, нам необхідно досліджувати тільки крапку ![]() . Складемо характеристичне рівняння в крапці
. Складемо характеристичне рівняння в крапці![]() .
.
![]() Одержимо, що
Одержимо, що
![]()
![]()
Коріння ![]() - дійсні й одного знака. Отже, крапка
- дійсні й одного знака. Отже, крапка ![]() - стійкий вузол.
- стійкий вузол.
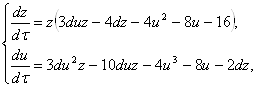
Досліджуємо нескінченно - вилучену частину площини поза кінцями осі oy перетворенням [7] ![]() Це перетворення систему (2.1) переводить у систему:
Це перетворення систему (2.1) переводить у систему:
 (2.7)
(2.7)
де ![]() .
.
Вивчимо нескінченно - вилучені крапки на осі U, тобто при z=0. Маємо:
![]()
![]()
Одержуємо, що ![]() . Отже, станів рівноваги поза кінцями осі oy немає.
. Отже, станів рівноваги поза кінцями осі oy немає.
Тепер дамо розподіл станів рівноваги системи (2.1) у вигляді таблиці 1.
Таблиця 1.
| d |
|
|
|
| ∞ |
| x=0 | |||||
| (-∞; 0) | сідло | невуст. вузол | вуст. вузол | сідло | вуст. вузол |
| (0; +∞) | сідло | вуст. вузол | невуст. вузол | сідло | вуст. вузол |
Положення кривих (2.2), (2.3) і розташування щодо їхніх станів рівноваги при d (0 і d (0 дається відповідно мал.1 (а, б).
Поводження траєкторій системи в цілому при d (0 і d (0 дається мал.4 (а, б) додатка А: Поводження траєкторій системи (2.1).
Досліджуючи вид кривих (2), (2.3) і розташування щодо їхніх станів рівноваги, переконуємося, що система (2.1) не має граничних циклів, тому що Воробйов А.П. [5] довів, що для систем, праві частини яких є поліноми другого ступеня, граничний цикл може оточувати тільки крапку типу фокуса. З огляду на розташування станів рівноваги відносно кривих (1.3) і (1.13), що є інтегралами системи (2.1), характер стану, містимо, що для системи (2.1) не може існувати граничних циклів, що оточують кілька станів рівноваги.
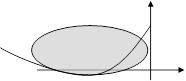
а (d (0)
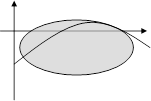
б (d (0)
Мал.1
2.2 Дослідження системи (1.1) з коефіцієнтами, заданими формулами (1.41) - (1.42)
Будемо проводити наше дослідження в припущенні, що
![]()
![]()
![]()
Нехай ми маємо систему (1.1), коефіцієнти якої визначаються формулами (1.41) - (1.42). Тоді система (1.1) буде мати вигляд:
 (2.8)
(2.8)
Інтегральні криві в цьому випадку мають вигляд:
![]() (2.9)
(2.9)
![]() (2.10)
(2.10)
Приватний інтеграл (1.13) у цьому випадку перетворюється у дві прямі (2.10)
0 комментариев