Навигация
Сглаживание исходных данных
40911
знаков
0
таблиц
5
изображений
3. Сглаживание исходных данных
На первичную информацию, выдаваемую ИК, могут накладываться локальные возмущения, искажающие характер этой информации. Причин этих локальных возмущений в основном две.
Первой причиной становятся случайные погрешности ИК, которые, как и для любых СИ, определяются только свойствами ИИС.
Второй причиной являются локальные неоднородности ИО, которые не зависят от свойств СИ и не учитываются в рамках используемых физических и математических моделей ИО. Наличие таких возмущений не является принципиально новым. Например, при измерении действующего значения напряжения сети переменного тока с помощью вольтметра на результате измерения сказываются шумы и помехи, накладывающиеся на это напряжение. Однако влияние этих шумов незначительно, поскольку они усредняются за счет инерционности вольтметра. В этом случае быстродействие ИК (в целом положительный фактор) приводит к отрицательным последствиям — фиксации в "мгновенных" отсчетах значений шумов.
Другой пример локальных воздействий, обусловленных свойствами ИО, — локальные флуктуации температуры воздуха за счет турбулентных потоков. К локальным неоднородностям относится шероховатость, имеющая масштабы порядка микрометров и долей микрометров, и волнистость поверхности, имеющая существенно большие масштабы.
Получая с ИК большое количество отсчетов, детально описывающих изменения исследуемой физической величины, можно построить оптимальные алгоритмы обработки этой информации, обеспечивающие наилучшее подавление этих локальных возмущений. Однако объем передаваемой и обрабатываемой информации при этом может оказаться нерационально большим. Для уменьшения этого объема производится сглаживание информации. В результате сглаживания ее объем уменьшается в несколько раз, а иногда и в десятки раз. Сразу отметим, что вводя предварительное сглаживание, мы отказываемся от оптимальной обработки исходной информации. Поэтому используемые субоптимальные алгоритмы обработки сглаженной информации дадут несколько худшие результаты. Это ухудшение обычно оказывается незначительным. Однако при выборе алгоритма сглаживания наличие этого ухудшения нужно иметь в виду и хотя бы ориентировочно оценивать его величину.
Наиболее часто производится сглаживание первичной информации во времени. В этом случае алгоритм обработки, называемый иногда оператором текущего среднего, очень прост:
 (5)
(5)
Это соотношение записано в дискретной форме. Однако с целью теоретического анализа удобнее записать его для непрерывного времени:
 (6)
(6)
Соотношение (6) является приближением к (5), поскольку на практике в большинстве случаев обработка ведется в дискретной форме, хотя иногда и используется сглаживание аналоговых сигналов с помощью интегрирующих RС-цепочек, интегрирующих операционных усилителей или других аналоговых фильтров. Алгоритмы (5) и (6) физически реализуемы и могут работать в реальном времени, поскольку для расчета усредненного значения используются значения (отсчеты) сигнала только в предшествующие моменты времени. Однако это приводит к задержке информативной составляющей на время T/2 или на М/2 отсчетов. От этого недостатка свободен алгоритм
который в силу своей физической нереализуемости может применяться только к накопленному массиву данных. Поэтому информация все равно будет получаться с запаздыванием, но будет привязана к правильному моменту времени.
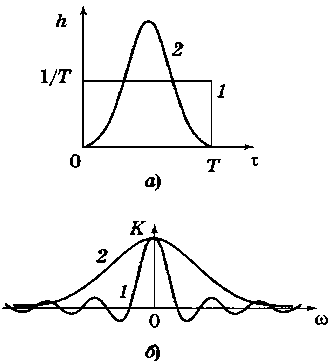
Алгоритм текущего среднего как в дискретном, так и в непрерывном виде очень прост. Однако он имеет некоторый недостаток. Весовая функция, соответствующая линейному оператору (6) , имеет вид 1, показанный на рис. 5, а, и записывается как
Взяв преобразование Фурье, получим комплексную частотную характеристику, соответствующую этой весовой функции.
![]()
Модуль этой частотной характеристики показан на рис. 5, б (кривая 1). Из ее графика видно, что частотная характеристика (8) существенно неравномерна и на частотах, кратных π/Т, обращается в нуль, то есть сигнал на этих частотах полностью подавляется.
Для улучшения качества сглаживания используются другие весовые функции, отличные от прямоугольной. Тогда оператор текущего среднего в общем случае примет вид
 (9)
(9)
Весовая функция в (7) должна удовлетворять условию
 (10)
(10)
которое обеспечивает для постоянного сигнала коэффициент передачи, равный единице. Обычно весовую функцию берут симметричной относительно середины интервала [0; Т], например полином второй или четвертой степени. Получаемая частотная характеристика все равно остается неравномерной и имеет нулевые провалы, но на более высоких частотах. Очень часто в качестве весовой функции оператора текущего среднего используется усеченное нормальное распределение (кривая 2 на рис. 5, а), поскольку преобразование Фурье от нормального распределения имеет ту же форму, а значит, модуль частотной характеристики монотонно убывает и она практически не обращается в нуль (кривая 2 на рис. 5, б).
При замене интеграла (9) суммой отсчеты усредняются с весовыми коэффициентами, близкими к отсчетам весовой функции. Некоторое уточнение требуется для строгого выполнения модифицированного условия (10), в соответствии с которым сумма весовых коэффициентов должна равняться единице.
К задачам сглаживания примыкает задача фильтрации информационного сигнала с энергетическим спектром Sx(w) на фоне шума с энергетическим спектром Sn(w). Частотная характеристика фильтра, обеспечивающего наименьшую среднеквадратичную погрешность воспроизведения информативной составляющей, задается соотношением
![]() (11)
(11)
Фазовая характеристика такого фильтра должна быть максимально близка к линейной.
Практическое применение соотношения (11) осложнено необходимостью располагать априорной информацией о спектрах информационной составляющей и локальных возмущений. Однако из этой формулы можно сделать один качественный вывод. Поскольку спектр шума, как правило, более широкополосный, чем спектр информативной составляющей, частотная характеристика, задаваемая (11), соответствует фильтру нижних частот, то есть и в этом случае производится сглаживание первичной информации.
Аналогично с помощью многократных интегралов или многократных сумм можно записать алгоритмы сглаживания по пространству.
Сглаженные функции изменяются медленнее по сравнению с исходными. Поэтому при их дискретизации можно использовать больший интервал, что и уменьшает объем передаваемых данных. Однако следует иметь в виду, что если введение поправок или линеаризация всегда приводят к положительным результатам, то к сглаживанию нужно относиться с осторожностью. При сильном сглаживании можно потерять быстро изменяющиеся компоненты, важные для описания ИО.
Для уменьшения объема обрабатываемых данных сглаживание может проводиться на центральной ЭВМ. Однако это не приведет к уменьшению загрузки каналов связи. В целях уменьшения объема передаваемых данных для сглаживания должны использоваться микропроцессорные устройства, встроенные в ИК.
Выводы
В процессе выполнения контрольной работы мы ознакомились с:
- типовыми алгоритмами сбора измерительной информации;
- введением поправок;
- сглаживанием исходных данных.
Литература
1. Автоматизация физических исследований и эксперимента: компьютерные измерения и виртуальные приборы на основе Lab VIEW / под ред. П. А. Бутыркина. — М.: ДМК-Пресс, 2005.— 264 с.
2. Анисимов Б. В., Голубкин В. Н. Аналоговые и гибридные вычислительные машины. — М.: Высшая школа, 1990., — 289 с.
3. Атамалян Э. Г. Приборы и методы измерения электрических величин. — М.: Дрофа, 2005. — 415 с.
4. Ацюковский В. А. Основы организации системы цифровых связей в сложных информационно-измерительных комплексах. — М.: Энергоатомиздат, 2001. — 97 с.
5. Барский А. Б. Нейронные сети. Распознавание, управление, принятие решений. — М.: Финансы и статистика, 2004. — 176 с.
6. Батоврин В., Бессонов А., Мошкин В. Lab VIEW: Практикум по электронике и микропроцессорной технике. — М.: ДМК-Пресс, 2005 —182 с.
7. Вентцелъ Е. С, Овчаров Л. А. Теория вероятностей и ее инженерные приложения. — М.: Высшая школа, 2007. — 491 с.
8. Волкова В. Н., Денисов А. А. Теория систем. — М.: Высшая школа, 2006. — 511 с.
9. ГОСТ Р 8.596—2002. ГСИ. Метрологическое обеспечение измерительных систем. Основные положения.
10. ГОСТ 16263—70. ГСИ. Метрология. Термины и определения.
11. ГОСТ 26016—81. Единая система стандартов приборостроения. Интерфейсы, признаки классификации и общие требования.
12. ГОСТ 8.437—81. ГСИ. Системы информационно-измерительные. Метрологическое обеспечение. Основные положения.
13. Грановский В. А. Системная метрология: метрологические системы и метрология систем. — СПб.: ГНЦ РФ ЦНИИ "Электроприбор", 1999. — 360 с.
14. Гутников В. С. Интегральная электроника в измерительных устройствах. — Л., 1988. — 304 с.
15. Демидович В. П., Марон И. А. Основы вычислительной математики. — М.: Наука, 1970. — 654 с.
16. Деч Р. Нелинейные преобразования случайных процессов. — М.: Советское радио, 1965. — 208 с.
17. Джексон Р. Г. Новейшие датчики. — М.: Техносфера, 2007.— 384 с.
18. Измерение электрических и неэлектрических величин / Н. Н. Ев-тихиев, Я. А. Купершмидт, В. Ф. Папуловский, В. Н. Скуго-ров; под общ. ред. Н. Н. Евтихиева. — М.: Энергоатомиздат,1990. — 352 с.
19. Информационно-измерительная техника и технологии / В. И. Калашников, С. В. Нефедов, А. Б. Путилин и др.; под ред. Г. Г. Ра-неева. — М.: Высшая школа, 2002. — 454 с.
20. Калабеков В. В. Цифровые устройства и микропроцессорные системы. — М.: Радио и связь, 1997. — 336 с.
21. Карабутов Н. Н. Адаптивная идентификация систем. Информационный синтез. — М.: Едиториал УРСС, 2006. — 384 с.
22. Киреев В. И., Пантелеев А. В. Численные методы в примерах и задачах. — М.: Высшая школа, 2008. — 480 с.
23. Корнеенко В. П. Методы оптимизации. — М.: Высшая школа, 2007. — 664 с.
24. Максимей И. В. Имитационное моделирование на ЭВМ. — М.: Радио и связь, 1988. — 230 с.
25. Мезон С, Циммерман Г. Электронные цепи, сигналы и системы. — М.: Иностранная литература, 1963. — 594 с.
26. Метрологическое обеспечение измерительных информационных систем (теория, методология, организация) / Е. Т. Удовиченко, А. А. Брагин, А. Л. Семенюк и др. — М.: Издательство стандартов, 1991. — 192 с.
27. МИ 2438—97. ГСИ. Системы измерительные. Метрологическое обеспечение. Общие положения.
28. Мячев А. А., Степанов В. Н. Персональные ЭВМ и микроЭВМ. Основы организации. — М.: Радио и связь, 1991. — 320 с.
29. Новоселов О. Н., Фомин А. Ф. Основы теории и расчета информационно-измерительных систем. — М.: Машиностроение,
1991. — 336 с.
30. Островский Ю. И. Голография и ее применение. — М.: Наука, 1976. — 256 с. дискретизация погрешность генератор линеаризация
31. Пантелеев А. В., Летова Т. А. Ме— М.: Высшая школа, 2008. — 544 с.тоды и задачах.
32. Потапов А. С. Распознавание образов и машинное восприятие. — СПб.: Политехника, 2007. — 546 с.
33. Путилин А. Б. Вычислительная техника и программирование в измерительных системах. — М.: Дрофа, 2006. — 416 с.
34. РМГ 29—99. Метрология. Основные термины и определения.
35. Рубичев Н. А., Фрумкин В. Д. Достоверность допускового контроля качества. — М.: Издательство стандартов, 1990. — 172 с.
36. Руководство по выражению неопределенности измерения / под ред. В. А. Слаева. — СПб.: ГП "ВНИИМ им Д. И. Менделеева", 1999. — 126 с.
37. Самарский А. А., Михайлов А. П. Математическое моделирование. — М.: Наука; Физматлит, 1997. — 428 с.
38. Советов Б. Я., Цехановский В. В. Информационные технологии. — М.: Высшая школа, 2008. — 263 с.
39. Уайлд Д. Дж. Методы поиска экстремума. — М.: Наука, 1967. — 268 с.
40. Ушаков И. А. Курс теории надежности систем. — М.: Дрофа, 2008. — 240 с.
41. Фомин Я. А. Теория выбросов случайных процессов. — М.: Связь, 1980. — 216 с.
42. Фрайден Дж. Современные датчики: справочник. — М.: Техносфера, 2005. — 592 с.
43. Фрумкин В. Д., Рубичев Н. А. Теория вероятностей и статистика в метрологии и измерительной технике. — М.: Машиностроение, 1987— 168 с.
44. Хартман К. и др. Планирование эксперимента в исследовании технологических процессов. — М.: Мир, 1977. — 562 с.
45. Цапенко М. П. Измерительные информационные системы. — М.: Энергоатомиздат, 1985. — 357 с.
46. Чистяков В. П. Курс теории вероятностей .— М.: Дрофа, 2007. — 256 с.
Похожие работы
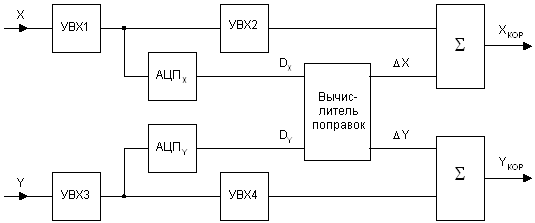
... аналоговой коррекции энергетической зависимости X и Y преобразования продолжаются только в цифровой форме. Обобщенная структурная схема цифрового канала измерительной информации изображена на рис.8. Рисунок 8. Канал аппаратной цифровой обработки. АЦП Х, Y, Z размещаются в модуле детектора в непосредственной близости от аналоговых источников. Это сводит к минимуму примесь всевозможных помех. ...
... проектируется исходя из решаемых задач и технико-экономических ограничений, а затем полученные результаты могут быть отнесены к конкретному классу. Практическая эффективность этой классификации невелика. 2. Общие принципы построения и применения ИИС Создаваемая ИИС должна обеспечивать достижение поставленных перед ней целей. Эти цели могут быть достигнуты различными способами. Поэтому должны ...
... хранение больших массивов измерительной информации. Следствием этого является схожесть структур, обязательное использование ЭВМ и соответствующего ПМО. Заключение В работе рассмотрены примеры измерительных информационных систем для исследования объектов различной физической природы. Литература 1. Автоматизация физических исследований и эксперимента: компьютерные измерения и виртуальные ...
еоценить значение МП и микроЭВМ при создании автоматизированных средств измерений, предназначенных для управления, исследования, контроля и испытаний сложных объектов. Развитие науки и техники требует постоянного совершенствования средств измерительной техники, роль которой неуклонно возрастает. Основные понятия и определения Понятия и определения, используемые в измерительной технике, ...
0 комментариев