Навигация
Анализ известных конструкций рулевого управления. Обоснование
39698
знаков
7
таблиц
12
изображений
1.3 Анализ известных конструкций рулевого управления. Обоснование
выбора реечного управления
Рулевое колесо через свой вал передает на рулевой механизм вращающий момент, развиваемый водителем, и преобразует его в силы растяжения с одной стороны, и силы сжатия с другой, которые через боковые тяги воздействует на поворотные рычаги рулевой трапеции. Последние закреплены на поворотных цапфах и поворачивают их на требуемый угол. Поворот происходит вокруг шкворневых осей.
Рулевые механизмы делятся на механизмы с вращательным и возвратно-поступательным движением на выходе. На легковые автомобили устанавливаются рулевые механизмы трех видов: "червяк-двухгребневый ролик", "винт-гайка с циркулирующими шариками" – с вращательным движением на выходе, и "шестерня-рейка" – с вращательно-поступательным.
Рулевой механизм "винт-гайка с циркулирующими шариками" является достаточно совершенным, но и наиболее дорогим из всех рулевых механизмов. В винтовой паре этих механизмов имеет место не трение скольжения, а трение качения. Гайка, являясь одновременно и рейкой, находится в зацеплении с зубчатым сектором. Ввиду малого угла поворота сектора, у такого механизма легко реализовать переменное передаточное отношение с повышением его по мере увеличения угла поворота руля за счет установки сектора эксцентриситетом либо применением переменного шага зубчатого зацепления. Высокий КПД, надежность, стабильность характеристик при больших нагрузках, высокая износостойкость, возможность получения беззазорного соединения обусловили практическое исключительное применение этих механизмов на автомобилях большого и высшего классов, отчасти и среднего класса.
На легковых автомобилях малого и особо малого классов применяются рулевые механизмы вида "червяк-ролик" и "шестерня-рейка". При зависимой подвеске передних колес, которая в настоящее время применяется только на автомобилях повышенной и высокой проходимости, необходим рулевой механизм только с вращательным движением на выходе. По подавляющему числу показателей механизмы вида "червяк-ролик" уступают механизму "шестерня-рейка" и ввиду удобства компоновки на переднеприводных автомобилях последние механизмы получили исключительно широкое применение.
Преимуществами рулевого управления вида "шестерня-рейка" являются:
· Простота конструкции;
· Малые затраты на изготовление;
· Легкость хода благодаря высокому КПД;
· Автоматическое устранение зазоров между зубчатой рейкой и шестерней, а также равномерное собственное демпфирование;
· Возможность шарнирного крепления боковых поперечных тяг непосредственно к рулевой рейке;
· Низкая податливость рулевого управления и, как следствие, его высокое быстродействие;
· Малый объем, требуемый для установки этого рулевого управления (благодаря чему на всех переднеприводных автомобилях, выпускающихся в Европе и Японии, установлено именно оно).
· Отсутствие маятникового рычага (включая и его опоры) и средней тяги;
· Высокий КПД вследствие малого трения как в рулевом механизме, так и в рулевом приводе за счет уменьшения количества шарниров.
К недостаткам относятся:
· Повышенная чувствительность к ударам вследствие малого трения, большого обратного КПД;
· Повышенная нагрузка от усилий со стороны боковых тяг;
· Повышенная чувствительность к колебаниям рулевого управления;
· Ограниченная длина боковых тяг (при их шарнирном закреплении к концам рулевой рейки);
· Зависимость угла поворота колес от хода зубчатой рейки;
· Повышенные усилия во всем рулевом управлении из-за иногда слишком коротких поворотных рычагов рулевой трапеции;
· Уменьшение передаточного отношения при увеличении угла поворота колес, вследствие чего маневрирование на стоянке требует больших усилий;
· Невозможность применения этого рулевого управления в автомобилях с зависимой подвеской передних колес.
Наиболее широкое применение нашли следующие типы исполнения реечного рулевого управления:
Тип 1 – боковое расположение шестерни (слева или справа в зависимости от расположении рулевого колеса) при креплении боковых тяг к концам зубчатой рейки;
Тип 2 – среднее расположение шестерни при таком же креплении рулевых тяг;
Тип 3 – боковое расположение шестерни при креплении боковых тяг к середине зубчатой рейки;
Тип 4 – экономичный укороченный вариант: боковое расположение шестерни при креплении обоих боковых тяг к одному концу зубчатой рейки.
Конструкция реечного рулевого управления типа 1 является самой простой и требующей минимум места для его размещения. Поскольку шарниры крепления боковых тяг закреплены на концах зубчатой рейки. Рейка нагружена, в основном, осевыми усилиями. Радиальные усилия, которые зависят от углов между боковыми тягами и осью рейки, невелики.
Практически у всех переднеприводных автомобилей с поперечным расположением двигателя поворотные рычаги рулевой трапеции направлены назад. Если при этом вследствие изменения высоты внешних и внутренних шарниров боковых тяг требуемый наклон при движении на повороте не достигается, то, как при ходе сжатия, так и при ходе отбоя схождение становится отрицательным. Предотвращение нежелательного изменения схождения возможно у автомобиля, у которого рулевой механизм расположен низко, а боковые тяги несколько длиннее нижних поперечных рычагов подвески. Более благоприятным случаем является переднее расположение рулевой трапеции, которое практически достижимо только для автомобилей классической компоновки. В этом случае поворотные рычаги рулевой трапеции должны быть развернуты наружу, внешние шарниры боковых тяг входят глубоко в колеса, боковые тяги могут быть выполнены более длинными.
Реечное рулевое управление типа 2, в котором шестерня установлена в средней плоскости автомобиля, применяется только на автомобилях со средним или задним расположением двигателя, поскольку среднее расположение двигателя влечет за собой такой недостаток, как большой требуемый объем для рулевого управления из-за необходимости в "изломе" рулевого вала.
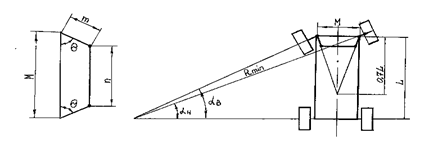
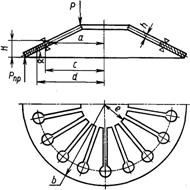
В случае, если рулевой механизм должен быть расположен относительно высоко, при использовании подвески МакФерсон неизбежно крепление боковых тяг к середине зубчатой рейки. Схема, иллюстрирующая основы выбора длины боковых тяг для подвески МакФерсон, приведена на рис.1. В таких случаях внутренние шарниры этих тяг крепятся в средней плоскости автомобиля непосредственно к рейке или связанному с ней элементу. При этом конструкция рулевого механизма должна предотвращать скручивание зубчатой рейки воздействующими на нее моментами. Это предъявляет особые требования к направляющим рейки и поводков, так как при слишком малых зазорах в них рулевое управление будет очень трудным (из-за высокого трения), при слишком больших возникают стуки. Если поперечное сечение зубчатой рейки не круглое, а Y-образное, то дополнительные меры по предотвращению кручения рейки вокруг продольно оси можно не предусматривать.
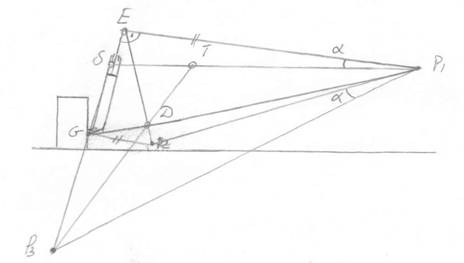
Рис. 1. Определение длины боковой тяги.
Рулевое управление типа 4, которое устанавливается на легковые автомобили фирмы Фольксваген, отличается легкостью хода и недорого в изготовлении. К недостаткам следует отнести повышенные нагрузки отдельных деталей и возможное в результате этого снижение жесткости.
Для предотвращения вызываемого изгибающим моментом прогиба/скручивания зубчатая рейка имеет относительно большой диаметр – 26 мм.
На практике выбор типа реечного рулевого управления производится из компоновочных соображений. В нашем случае из-за отсутствия места для размещения рулевого механизма внизу, принято верхнее расположение рулевого механизма. Это обуславливает применение рулевого управления типов 3,4. для обеспечения прочности и жесткости конструкции окончательно принимается верхнее расположение рулевого механизма и тип 3 рулевого управления.
Следует признать, что такая компоновка рулевого управления не является самой удачной. Высокое расположение рулевого механизма обуславливает его большую податливость из-за прогиба амортизационных стоек. При этом наружное колесо прогибается в сторону положительного развала, внутреннее – в сторону отрицательного. В результате колеса дополнительно наклоняются в направлении, куда их уже стремятся наклонить боковые силы при движении в повороте.
Кинематический расчет рулевого привода.
Кинематический расчет заключается в определении углов поворота управляемых колес, нахождении передаточных чисел рулевого механизма, привода и управления в целом, выборе параметров рулевой трапеции, а также в согласовании кинематики рулевого управления и подвески.
Похожие работы
... =0,2м После подстановки данных в формулу (2.7) получим: 2.3 Прочностной расчет рулевого механизма и рулевого привода Прочностной расчет рулевого механизма. В автомобиле Москвич 2140 в качестве рулевого механизма применяют глобоидную пару «червяк-ролик». Осевое усилие на винте определяется по формуле: ;(2.8) где: - начальный радиус винтовой линии червяка по наименьшему сечению; ...
... 500х400 860х360 1,26 0,86 1,71 2,3 4,3 1,41 3,42 3,3 6,5 1,8 2,5 1,26 0,86 1,71 2,3 4,3 1,41 3,42 3,3 6,5 1,8 2,5 26,04 14. ТЕХНИЧЕСКОЕ ОБСЛУЖИВАНИЕ ХОДОВОЙ ЧАСТИ И РУЛЕВОГО УПРАВЛЕНИЯ Ходовая часть состоит из: остова, переднего моста, колесного движетеля и подвески. Передними колесами трактора управляют ...
... дорожный просвет и повышается уровень шума при работе главной передачи. КПД цилиндрической пары — не менее 0,98. 1.4 Дифференциалы трансмиссии автомобиля Анализ и оценка конструкции дифференциала автомобиля На автомобиле ВАЗ-2108 применяется симметричный конический сателитный дифференциал. Симметричные конические дифференциалы наиболее распространенные (их часто называют простыми). ...
... 90 Угол преодолеваемого подъема, не менее, % 25 Внешний габаритный радиус поворота, м 9,8 Перечень регламентных работ технического обслуживания автомобиля КамАЗ 53212 Техническое обслуживания ТО-1 для автомобиля КамАЗ 53212 представленная далее проводится согласно "Положению о текущем ремонте и обслуживании подвижного состава". Согласно данному положению первое техническое обслуживание ...
0 комментариев