Навигация
Определение параметров рулевой трапеции
39698
знаков
7
таблиц
12
изображений
1.4 Определение параметров рулевой трапеции
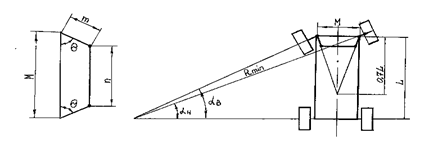
Вначале рассчитывается максимальный средний угол поворота управляемых колес, необходимый для движения автомобиля с минимальным радиусом. Согласно схемы, изображенной на рис.2.
 (1)
(1)
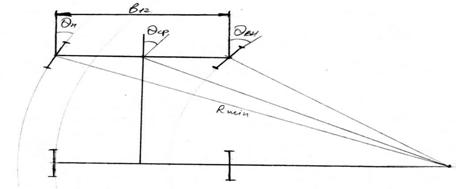
Рис. 2.Схема поворота автомобиля с абсолютно жесткими колесами.
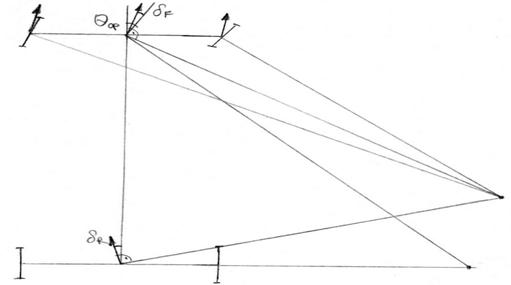
Рис. 3.Схема поворота автомобиля с податливыми колесами.
Для того, чтобы управляемые жесткие колеса катились при повороте без проскальзывания, их мгновенный центр поворота должен лежать на пересечении осей вращения всех колес. При этом наружный qн и внутренний qвн углы поворота колес связаны зависимостью:
![]() (2)
(2)
где l0 – расстояние между точками пересечения осей шкворней с опорной поверхностью. Поскольку эти точки практически совпадают для переднеприводных автомобилей с центрами контакта колес с дорогой (что обусловлено малым плечом обкатки и продольным углом наклона шкворня),
![]() (3)
(3)
Обеспечить такую зависимость возможно лишь при помощи довольно сложной кинематической схемы привода, однако, рулевая трапеция позволяет максимально приблизиться к ней.
Вследствие податливости шин в боковом направлении колеса под действием боковых сил катятся с уводом. Схема поворота автомобиля с податливыми колесами приведена на рис. 3. Для высокоэластичных шин форму трапеции приближают к прямоугольнику с тем, чтобы повысить эффективность работы наружнего, более нагруженного колеса. На некоторых автомобилях трапеция спроектирована таким образом, что до угла поворота »100 колеса остаются примерно параллельными. Но при больших углах поворота колес кривая фактических углов поворота вновь достигает кривой требуемых углов по Аккерману. Благодаря этому износ шин при парковании и поворотах уменьшается.
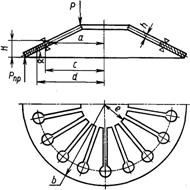
Подбор параметров трапеции начинается с определения угла наклона боковых рычагов трапеции. В настоящее время этот угол обычно подбирается на основании опыта проектирования предшествующих моделей.
Для проектируемого рулевого управления принимаем l=84,190.
Далее определяется длина поворотного рычага трапеции. Эту длину принимают возможно большей по условиям компоновки. Увеличение длины поворотного рычага позволяет снизить усилия, действующие в рулевом управлении, как следствие, повысить долговечность и надежность рулевого управления, а также снизить его податливость.
В нашем случае длина поворотного рычага принята равной 135,5 мм.
Очевидно, что с увеличением длины поворотного рычага возрастает ход рейки, необходимый для достижения заданного максимального угла поворота управляемых колес.
Потребный ход рейки определяется графическим методом либо расчетным путем. Также графическим либо расчетным путем определяется кинематика рулевой трапеции.
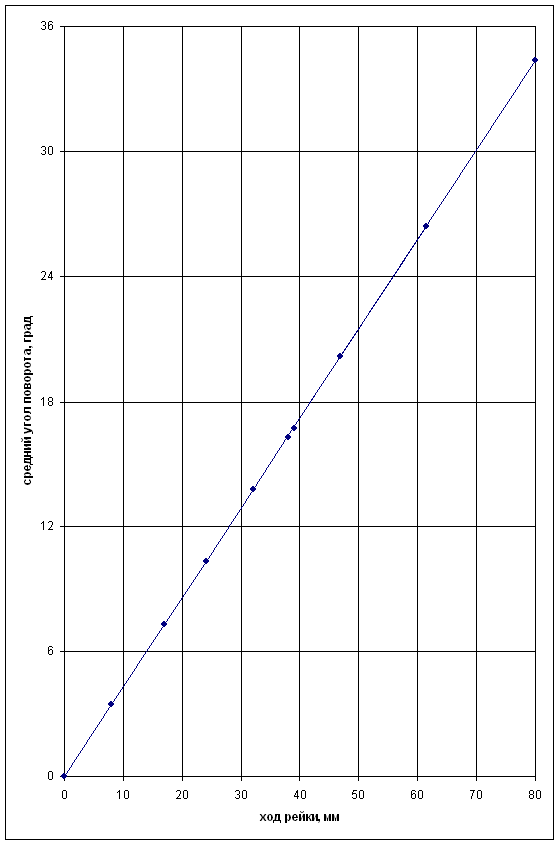
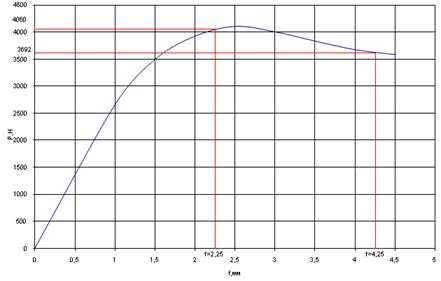
Рис. 4. Зависимость среднего угла поворота управляемых колес от хода рейки
На рис. 4 показан график зависимости среднего угла поворота колес от хода рейки. Данные для построения графика получены с помощью программы WKFB5M1, которая применяется в отделе общей компоновки и отделе ходовой части и отделе тормозов УПШ ДТР ВАЗа для расчета кинематики подвески МакФерсон и реечного рулевого управления. По графику определяем, что для обеспечения угла поворота колес q=34,320 необходим ход рейки в одну сторону равный 75,5 мм. Полный ход рейки l=151 мм.
На рис. 5 показана зависимость разности углов поворота наружнего и внутреннего колес в функции угла поворота внутреннего колеса. Здесь же приведена рассчитанная по Аккерману кривая требуемого изменения разности углов поворота колес.
Показателем, служащим для оценки кинематики рулевого привода, является разность углов поворота колес при угле поворота внутреннего колеса, равном 200:
![]() (4)
(4)
1.5 Передаточное отношение рулевого управления
Общее кинематическое передаточное отношение рулевого управления, определяемое передаточными числами механизма Uр.м. и привода Uр.п. равно отношению полного угла поворота рулевого колеса к углу поворота колес от упора до упора:
![]() (5)
(5)
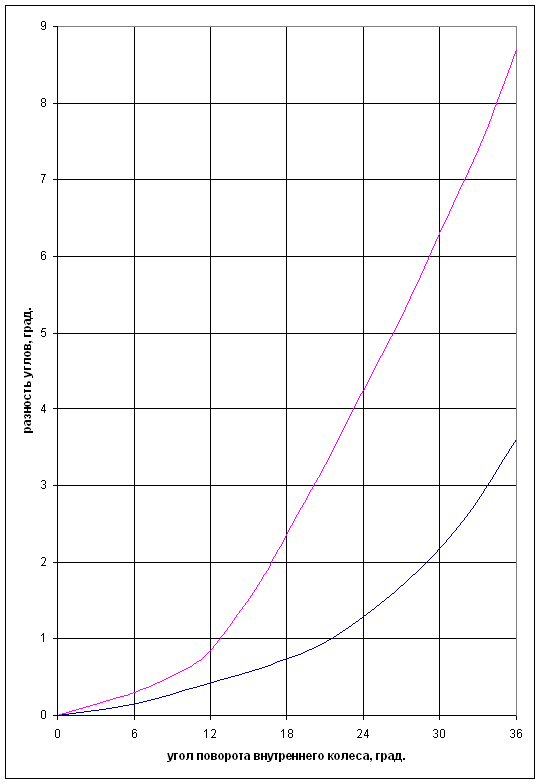
Рис. 5.Зависимость разности углов поворота колес от угла поворота внутреннего колеса:
1-рассчитанная по соотношению Аккермана
2-для проектируемого автомобиля
Для легковых автомобилей с механическим рулевым управлением qр.к.max=10800…14400 (3…4 оборота рулевого колеса), при наличии усилителя qр.к.max=7200…10800 (2…3 оборота рулевого колеса).
Обычно количество оборотов рулевого колеса определяется в этих пределах по результатам расчета зубчатого зацепления "шестерня-рейка". В нашем случае расчеты показали оптимальное число оборотов, равное 3,6 (12960).
Тогда общее передаточное число равно:
![]() (6)
(6)
Известно, что
![]() (7)
(7)
Поскольку для проектируемого автомобиля принят рулевой механизм с постоянным передаточным числом, Uр.м. постоянно для любого угла поворота руля:
![]()
Передаточное число рулевого привода не является величиной постоянной и уменьшается с увеличением угла поворота руля, что неблагоприятно сказывается на усилии на рулевом колесе при парковании.
Зависимость кинематического передаточного отношения проектируемого рулевого управления приведена на рис.6
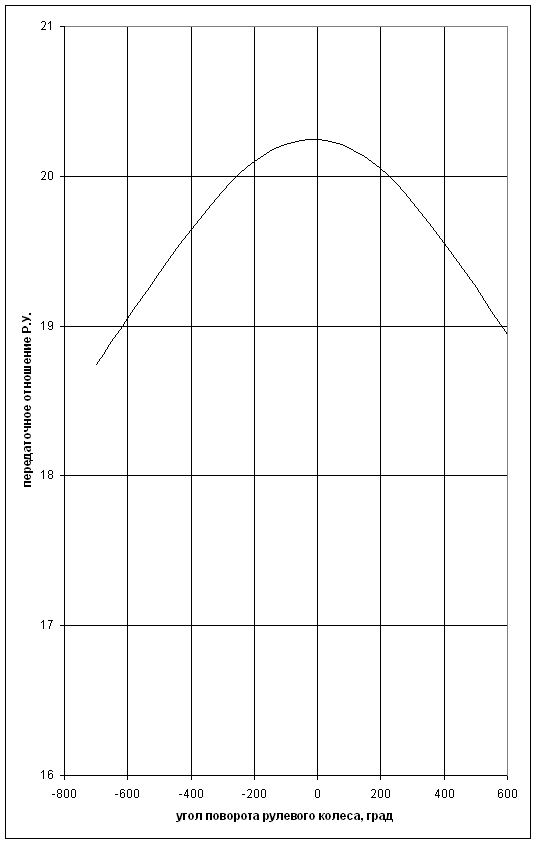
Рис. 6. Зависимость передаточного отношения рулевого управления от угла поворота руля.
Похожие работы
... =0,2м После подстановки данных в формулу (2.7) получим: 2.3 Прочностной расчет рулевого механизма и рулевого привода Прочностной расчет рулевого механизма. В автомобиле Москвич 2140 в качестве рулевого механизма применяют глобоидную пару «червяк-ролик». Осевое усилие на винте определяется по формуле: ;(2.8) где: - начальный радиус винтовой линии червяка по наименьшему сечению; ...
... 500х400 860х360 1,26 0,86 1,71 2,3 4,3 1,41 3,42 3,3 6,5 1,8 2,5 1,26 0,86 1,71 2,3 4,3 1,41 3,42 3,3 6,5 1,8 2,5 26,04 14. ТЕХНИЧЕСКОЕ ОБСЛУЖИВАНИЕ ХОДОВОЙ ЧАСТИ И РУЛЕВОГО УПРАВЛЕНИЯ Ходовая часть состоит из: остова, переднего моста, колесного движетеля и подвески. Передними колесами трактора управляют ...
... дорожный просвет и повышается уровень шума при работе главной передачи. КПД цилиндрической пары — не менее 0,98. 1.4 Дифференциалы трансмиссии автомобиля Анализ и оценка конструкции дифференциала автомобиля На автомобиле ВАЗ-2108 применяется симметричный конический сателитный дифференциал. Симметричные конические дифференциалы наиболее распространенные (их часто называют простыми). ...
... 90 Угол преодолеваемого подъема, не менее, % 25 Внешний габаритный радиус поворота, м 9,8 Перечень регламентных работ технического обслуживания автомобиля КамАЗ 53212 Техническое обслуживания ТО-1 для автомобиля КамАЗ 53212 представленная далее проводится согласно "Положению о текущем ремонте и обслуживании подвижного состава". Согласно данному положению первое техническое обслуживание ...
0 комментариев