Навигация
Составление уравнений кинетостатики для управляющих моментов
29660
знаков
6
таблиц
4
изображения
2. Составление уравнений кинетостатики для управляющих моментов.
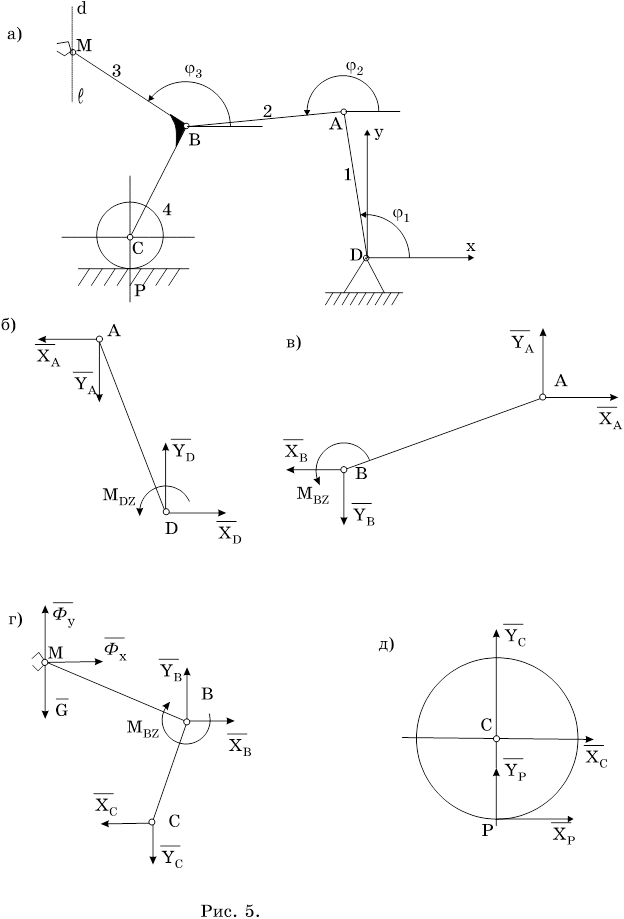
Для составления уравнений кинетостатики система освобождается от связей. На рисунке изображаются реакции связей, активные силы: сила ![]() - точки М и внутренние моменты управления МBz, MDz. По принципу Деламбера условно прикладываются к точке М силы инерции: сила инерции
- точки М и внутренние моменты управления МBz, MDz. По принципу Деламбера условно прикладываются к точке М силы инерции: сила инерции ![]() = - m
= - m![]() . Для заданного движения эта сила в проекциях определяется так:
. Для заданного движения эта сила в проекциях определяется так:
Фx=0
Фy=m´aмy=m![]() мy=m´V´p cos pt (51)
мy=m´V´p cos pt (51)
Составляются уравнения равновесия систем сил, указанных на рис. 4б, б, в, г, д.
Для звена 1 (рис 5б):
SXi=XD - XA=0
SYi=YD - YA=0 (52)
SMD=MD2+YA´r1´sin(j1 - ![]() )+XA´r1´cos(j1 -
)+XA´r1´cos(j1 - ![]() )=0
)=0
Для звена 2 (рис.5в):
SXi=XA - XB=0
SYi=YA - YB=0 (53)
SMB=MBz+XA´r2´sin(j2 -p)+YA´r2´cos(j2 -p)=0
Для звена 3 (рис.5г):
SXi=ФX + XB - XC=0
SYi=ФY - G+YB - YC=0 (54)
SMB= - MBz+(G - ФY)´2r3´sin(j3 - ![]() ) - Фx´2r2´cos(j3 -
) - Фx´2r2´cos(j3 - ![]() ) -
) -
- Xc ´r3´sin(j3 - ![]() ) +Yc´r3´cos(j3 -
) +Yc´r3´cos(j3 - ![]() )=0
)=0
Для звена 4 (рис.5д):
SXi=XP + XC=0
SYi=YP + YC=0 (55)
Так как XP=0, то из (55) XC=0
Так как ФX=0 и XC=0, то из (54) XB=0, а из (53) и (52) XA=0 и XD=0. То есть
ФX=XP=Xc=XP=XD=XA=0 (56)
Из (52), (53) YA=YB=YD
Из (54) YB - YC=G - ФY (57)
Из уравнений (52), (53), (54)
MDz=YA´r1´cosj1
MBz=YA´r2´cosj2 (58)
MBz=(ФY - G)´2r3´cosj3+YC´r3´sinj3
Из уравнений (57), (58)
YC=YA - G+ФY
YA´r2´cosj2=(ФY- G)´2r3´cosj3+YA´r3´sinj + (ФY - G)´r3´sinj3
YA(r2 cosj2 - r3sinj3)=(ФY - G)(2r3 cosj3+r3sinj3)
![]() ,
,
MBz=![]() ,
,
MDz=![]() .
(59)
.
(59)
или из уравнений (58)
MDz=MBz![]() (60)
(60)
3. Составление кинематических уравнений.
Кинематические уравнения (39) заимствуются из ранее решенных задач и с учетом того,что VMx=0; VMy=V sin kt, запишутся:
w3z= ,
,
Vcx=w3z´r3(2sinj3 - cosj3), (61)
w1z= ,
,
w2z=![]() .
.
Дополним (61) уравнениями:
![]() =w1z;
=w1z; ![]() =w2z;
=w2z; ![]() =w3z, (62)
=w3z, (62)
4. Вычисление мощности двигателей управления.
NB=MBz(w2z - w3z) (63)
ND=MDz´w1z, (64)
5. Решение задачи и обработка результатов.
Вычисления в силу уравнений (59), (60), (61), (62) проводятся на ЭВМ. Для интегрирования уравнений (61), (62) используется конечноразностная схема Эйлера с шагом интегрирования, равным шагу печати Dt=0,07c.
По результатам решения задачи строятся графики j1(t), w1z(t), w2z(t), w3z(t), MBz(t), MDz(t).
Для вычисления мощности двигателей из таблицы счета выбираются значения угловых скоростей и моментов упрвления для t=0,56c. Эти значения подставляются в (63), (64).
6. Контроль решения.
Графики не должны иметь разрывов. При t=0 и t=t3 угловые скорости близки к нулю. Результаты графоаналитической проверки для момента времени t=0,56c близки результатам счета на ЭВМ.
Литература.
1. Красковский Е.Я., Дружинин Ю.А., Филатов Е.М., Расчет и конструирование механизмов приборов и вычислительных систем. Учебное пособие для приборостроительных специальностей вузов. -M; Высш.шк., 1991-480с.
2. Механика промышленных роботов; Учебное пособие для вузов: в 3 кн./Под ред. К. В. Фролова, Е. И. Воробьева, М. Высш.шк., 1988.
3. Бурдаков С.Ф. Проектирование манипуляторов промышленных роботов и роботизированных комплексов. Учебное пособие для студентов вузов, обучающихся по специальности: ” Робототехнические системы и комплексы ”/С. Ф. Бурдаков, В. А. Дьяченко, А. Н. Тимофеев М.: Высш.шк., 1988.
4. Камышный Н. М., Автоматизация загрузки станков - М.; Машиностроение, 1977.- 287c.
5. Красников В. Д., Промышленные роботы и манипуляторы: Учебное пособие Ростов-на-Дону: Институт с/x машиностроения, 1981 - 148c.
6. Новожилов И. В., Зацепин М. Ф. Типовые расчеты по теоретической механике на базе ЭВМ. Учебное пособие для вузов. - М.: Высш.шк., 1986 - 264 с.
Похожие работы
... 8 и мультивибратор, счетчик фиксируется в последнем состоянии, а результат счета через комбинационную схему КС2 (блок 12) выводятся на шину данных BD. В таком состоянии автоматическое устройство будет находиться до прихода следующего запускающего импульса. Uо.выпр. - номинальное выпрямленное напряжение выпрямителя (входное напряжение стабилизатора); Iо.max.выпр.- максимальный ток выпрямителя;max ...
... посадок отдельных деталей. В местах посадки подшипников при вращении внутреннего кольца рекомендуют поля допусков для вала n6, m6, k6. Свободные размеры принимают по 14 квалитету. 3.2 Кинематическая схема мотор-редуктора и силы, действующие в зацеплениях зубчатых колес. Кинематическая схема трехступенчатого мотор - редуктора включает в себя червячную, коническую и цилиндрическую прямозубые ...
... . Алгоритм управления показывает, как должно изменяться управление u, чтобы обеспечить заданный алгоритм функционирования. Алгоритм функционирования в автоматической системе реализуется с помощью управляющих устройств. В основе используемых в техники алгоритмов управления лежат некоторые общие фундаментальные принципы управления, определяющие, как осуществляется увязка алгоритма управления с ...



... поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления. Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, ...
0 комментариев