Навигация
Расчет электроприводов постоянного и переменного тока
17703
знака
3
таблицы
25
изображений
МИНИСТЕРСТВО ОБЩЕГО И ПРОФЕССИОНАЛЬНОГО
ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
ЛИПЕЦКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра электрооборудования
КУРСОВАЯ РАБОТА
по курсу: «Автоматизированный электропривод»
на тему: «Расчет электроприводов постоянного и переменного тока»
Выполнил студент
гр. ЭО – 95 Васин А.В.
____________________
«__» __________ 1999
Принял ассистент
Захаров К. Д.
____________________
____________________
«__» _________ 1999
Липецк 1999
ЗАДАНИЕ
1. Электропривод с двигателем постоянного тока параллельного возбуждения
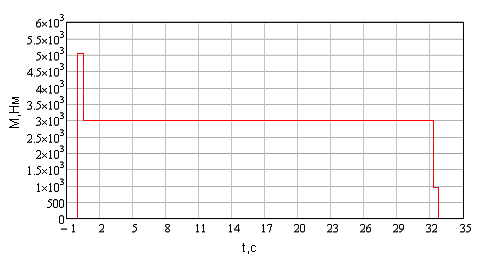
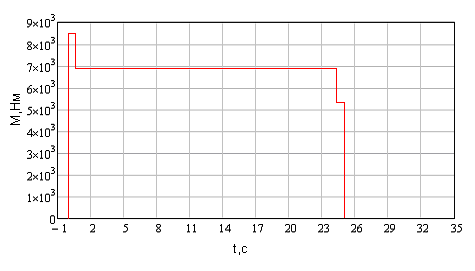
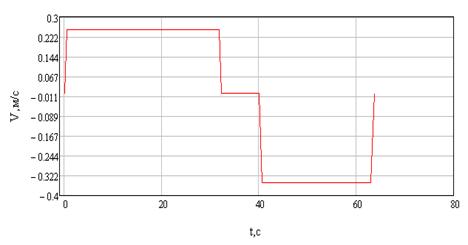
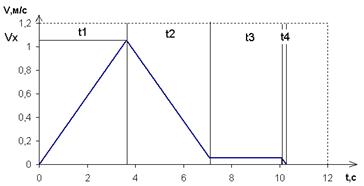
1.1. По исходным данным (табл.1), используя нагрузочную диаграмму и тахограмму механизма (рис.1), построить нагрузочную диаграмму двигателя. Известны следующие параметры механизма:
J— суммарный момент инерции механизма, приведенный к валу двигателя (с учетом момента инерции самого двигателя) при нагрузке Мс1 и Мс2;
J’=0,2J — суммарный момент инерции при Мс3 и Мс4.
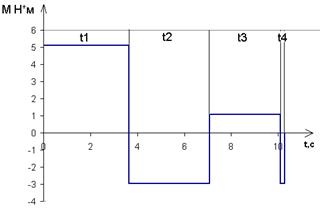
Цикл работы механизмов состоит из следующих операций: подъем груза с Мс1=Мс/ и опускание с Мс2=Мс, а также подъем грузозахватывающего устройства с Мс3=0,3Мс1 и опускание с Мс4=0,3Мс2 (при активном моменте статическом; кпд передачи =0,8).
Операции содержат режимы пуска, установившейся работы, предварительного понижения скорости и тормржения (см. рис.1). Продолжительность включения ПВ%=65% при одинаковом времени пауз.
Время установившейся работы на естественной характеристике tуст =2tпуск1; время работы на пониженной скорости составляет 0,5tпуск1. Максимально допустимое ускорение электропривода не должно превышать |доп| в режиме торможения с Мс3. Во всех остальных переходных режимах момент двигателя должен быть одинаковым, равным Мдоп=2,5Мн.
1.2. По нагрузочной диаграмме выбрать двигатель постоянного тока параллельного возбуждения из серии машин длительного режима работы, имеющих угловую скорость р.
1.3. Построить механические =f(M) и электромеханические =f(I) характеристики электродвигателя для следующих случаев: пуск в N=2 ступеней, торможение противовключением, получение пониженной скорости =0,3р шунтированием цепи якоря и возвращение в режим =0 (остановка) путем торможения противовключением. Определить параметры резисторов.
1.4. Определить пределы, в которых будет изменяться механическая характеристика в естественной схеме включения при колебаниях напряжения питания в пределах 20%.
1.5. Построить характеристику динамического торможения =f(I), обеспечивающую замедление с ускорениями, не превышающими |доп|. Мс=0,5Мн. Определить параметры тормозного резистора.
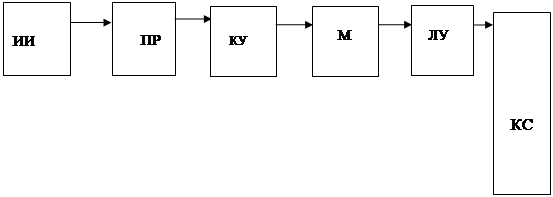
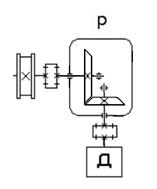
1.6. Изобразить структурную схему двухмассовой системы механизма передвижения тележки. Приняв J1=Jдв, J2=3J1, 12=1,2 с-1, построить АЧХ при воздействии возмущения на вал механизма.
1.7. Рассчитать и построить механическую характеристику разомкнутой системы УП-Д, если еп=220 В; внутреннее сопротивление управляемого преобразователя rп=2rяд.
1.8. Изобразить структурную схему и рассчитать уравнение статической механической характеристики в системе УП-Д с замкнутой обратной связью по скорости. Определить коэффициент обратной связи по скорости Кос и задающий сигнал Uзс, если статическая механическая характеристика проходит через точки Мн, н и имеет жесткость в 10 раз большую, чем в разомкнутой системе. Преобразователь считать инерционным звеном с коэффициентом усиления Кп=100, постоянной времени Тп=0,01 с и с внутренним сопротивлением rп=2rяд.
2. Электропривод с двигателем постоянного тока последовательного возбуждения.
2.1. Согласно заданному варианту выбрать двигатель последовательного возбуждения тихоходного исполнения.
2.2. Рассчитать и построить естественные =f(I), =f(M) и диаграмму пусковых характеристик, определить параметры резисторов при пуске в N=3 ступеней.
2.3. Рассчитать и построить реостатные =f(I), =f(M), если известны координаты рабочей точки: =0,6н, Мс=Мн. Определить величину добавочного резистора.
2.4. Рассчитать и построить =f(I), =f(M) при питании двигателя пониженным напряжением U=0,5Uн.
2.5. Рассчитать и построить =f(M) динамического торможения с самовозбуждением, позволяющего производить спуск груза (нагрузка Мс=1,5Мн). Расчет производить для двух случаев: скорость спуска груза равна р1=-0,8н и р=-0,3н.
3. Электропривод с асинхронным двигателем.
3.1. Производственный механизм — вентилятор. По заданному варианту рассчитать мощность двигателя и выбрать по каталогу двигатель с фазовым ротором крановой или краново-металлургической серии.
3.2. Рассчитать и построить естественные и реостатные =f(M) и =f(I2), если механическая характеристика проходит через точку с=0,5н, Мс=Мн. Определить параметры резистора. Построить пусковую диаграмму при пуске в 2;3;3;4 ступени. Определить параметры пусковых резисторов.
Похожие работы
... при механических, климатических и специальных воздействиях окружающей среды; - специальные требования по защите информации. Построение «автоматизированной системы информационной поддержки наладочных работ электропривода» Дано: 1 Объект информатизации 2 Ограничения 3 Критерий 4 База данных 5 Классификатор характеристик 6 Пакет программ ...
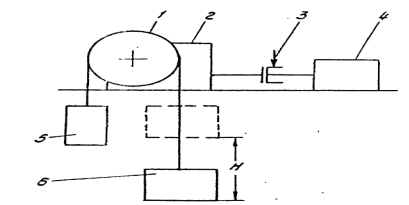
... режим работы, обеспечить выполнение требований по ускорению лифта и возможность его работы с разными грузами на подъем и на спуск. Кинематическая схема электропривода приведена на рисунке 1. Рисунок 1 - Кинематическая схема электропривода грузового лифта:1 – канатоведущий шкив; 2 –редуктор; 3 – тормозной шкив; 4 – двигатель; 5 – клеть; 6 – противовес. Технические данные транспортера ( ...
... требованиям по перегрузке. 2. Выбор системы управления 2.1 Технико-экономическое обоснование По кривым на рис. 1.3 [2] (с. 12) определяем, что для скорости передвижения тележки V=0.68 м/с и точности остановки v=20 мм требуется обеспечить диапазон регулирования D=1:10. Данному диапазону и установленной мощности электродвигателя удовлетворяют следующие системы управления [2] (табл. ...
... до (1000-1500:1 и выше. Нельзя представить себе ни одного современного производственного механизма, в любой области техники, который не приводился бы в действие автоматизированным электроприводом. В электроприводе основным элементом, непосредственно преобразующим электрическую энергию в механическую является электрический двигатель, который чаще всего управляется при помощи соответствующих ...
0 комментариев