Навигация
Автоматизированный электропривод
18432
знака
8
таблиц
0
изображений
Расчётно-пояснительная записка к курсовому проекту по дисциплине «Автоматизированный электропривод»
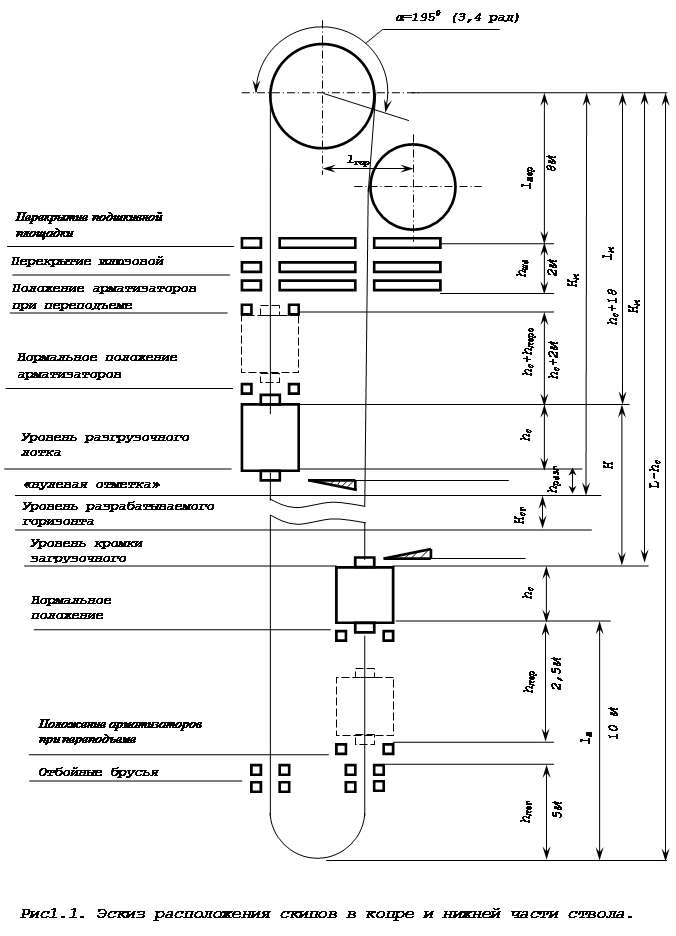
Тема: Разработать электропривод механизма передвижения мостового крана.
Выполнил студент: Барулин Ю.В.
Российский химико-технологический университет имени Д.И.Менделеева.
Новомосковский институт
Кафедра «Электротехники»
Новомосковск 2004 г.
Задание
Разработать электропривод механизма передвижения мостового крана.
Механизм включает двигатель постоянного тока, торможение включением сопротивления в цепь якоря. Вращение ротора двигателя передаётся через редуктор ходовым колесом, имеющем диаметр D=0.4м и цапф Dц=0,008м.Тележка перемещает кран с грузом mг=28 т на расстоянии перемещения L=18 м, скорость передвижения v=19 м/мин, а вес самой тележки mт=6 т, К.П.Д. передач механизма n=0,65.
Кроме того, при расчёте электропривода задаются продолжительностью включения ПВ=34% и приведённым к валу двигателя моментом энерции механизма I1=25% от момента инерции ротора электродвигателя.
Цикл работы тележки включает перемещение груза на расстояние и возвращение назад без груза. Разработать схему управления, которая должна обеспечивать ступенчатый пуск, электрическое торможение, снижение скорости перед остановкой до (20-30)% от номинальной, фиксацию механизма электромеханическим тормозом при отключении двигателя от сети.
Срок сдачи проекта
Дата выдачи задания
Введение
Эффективность средств производства, которыми располагает человеческое общество, в значительной степени определяется совершенством способов получения энергии, необходимой для выполнения механической работы в производственных процессах. Производственные механизмы, без которых нельзя в настоящее время представить себе ни одно производство прошли длительный путь своего развития, прежде чем приняли вид современного автоматизированного электропривода, приводящего в движение бесчисленное множество рабочих машин и механизмов в промышленности, транспорте, в сельском хозяйстве и в бытовой технике и автоматически управляющего их технологическими процессами.
Пределы использования по мощности современного электропривода весьма велики - от десятков тысяч киловатт в единичном двигателе до долей ватта.
Современный автоматизированный электропривод представляет собой сложную электромеханическую систему, предназначенную для приведения в движение рабочего органа машины и управления её технологическим процессом. Он состоит из трёх частей: электрического двигателя, осуществляющего электромеханическое преобразование энергии, механической части, передающей механическую энергию рабочему органу машины, и системы управления, обеспечивающей оптимальное по тем или иным критериям управление технологическим процессом. Диапазон изменения номинальных частот вращения электропривода имеет весьма широкие пределы. Использование средств дискретной техники в системах управления приводами постоянно тока расширяет диапазон регулирования скорости до (1000-1500:1 и выше. Нельзя представить себе ни одного современного производственного механизма, в любой области техники, который не приводился бы в действие автоматизированным электроприводом. В электроприводе основным элементом, непосредственно преобразующим электрическую энергию в механическую является электрический двигатель, который чаще всего управляется при помощи соответствующих преобразовательных и управляющих устройств с целью формирования статистических и динамических характеристик электропривода, отвечающих требованиям производственных механизмов.
Речь идёт об обеспечении с помощью автоматизированного электропривода оптимального режима работы машин, при котором достигается наибольшая производительность при высокой точности.
Многообразие производственных процессов обуславливает различные виды и характеры движения рабочих органов машины, а следовательно, и электроприводов. По виду движения электроприводы могут обеспечить: вращательное однонаправленное движение, вращательное реверсивное и поступательное реверсивное движение. Характеристики двигателя и возможности системы управления определяют производительность механизма, точность выполнения технологических операций.
Свойства электромеханической системы оказывают решающее влияние на важнейшие показатели рабочей машины и в значительной мере определяют качество и экономическую эффективность технологических процессов. Развитие автоматизированного электропривода ведёт к совершенствованию конструкций машин, к коренным изменениям технологических процессов, к дальнейшему прогрессу во всех отраслях народного хозяйства, поэтому теория электропривода- техническая наука, изучающая общие свойства электромеханических систем, законы управления их движением и способы синтеза таких систем по заданным показателям имеет важнейшее практическое значение.
Системы автоматического управления электроприводами постоянного и переменного тока, в которых используются все достижения полупроводниковой техники, а так же возможности электронной вычислительной техники, позволяют существенно упростить конструкции производственных механизмов, повысить их точность и поднять производительность, т.е. способствовать техническому прогрессу. Широкая автоматизация механизмов на базе следящих систем электроприводов, систем с цифровым программным управлением и средств комплексной автоматизации – обширная и весьма важная развивающаяся область автоматизированного электропривода.
1.Расчёт статистических нагрузок и мощности ДТП
1.1Статистическая нагрузка при движении тележки с грузом
Рс1=кg(mт+mг) (мDц/2+f)v/nD/2
где к-коэффициент, учитывающий трение
(к=1,2 1,3). Принимаем к=1,25
g-ускорение свободного падения, Н*м2;
mт-масса тележки, кг;
mг-масса груза, кг;
f-коэффициент трения качения. Принимаем в зависимости от диаметра колеса. принимаем f=0.0005
м-коэффициэнт трения;
Dц-диаметр цапфа;
V-скорость передвижной тележки, м/с;
D-диаметр колёс, м;
n-номинальный КПД передачи механизма.
Рс1=1,25*9,81(6000+28000)(0,25*0,08/2+0,0005)*0,32/0,65*0,4/2=10776Вт=10,78кВт
Мощность двигателя при движении тележки без груза определяется аналогично, с учётом что mг=0
Рс2=кgmт(мDц/2+f)V/n*D/2
Рс2=1,25*9,81*6000(0,25*0,08/2+0,0005)*0,32/0,65*0,4/2=1902Вт=1,9кВт
Время работы с грузом и без груза
tp1=tp2=L/V,
где L-расстояние перемещения, м
tp1=tp2=18/0.32=56.8c
Время цикла при заданной продолжительности включения
tц=(tp1+tp2)*100% / ПВ%?
где ПВ% заданная продолжительность включения
tц=(56,8+56,8)*100% / 34%=334 c
Время пауз
tп1=tп2=(tц-(tp1+tp2))/2
tп1=tп2=(334-(56,8+56,8))/2=110,2с
Так как время цикла меньше 10 минут, то режим работы повторно-кратковременный
Эквивалентная среднеквадратичная мощность за время работы
Рэ= (Р2с1*tp1+P2c2*tp2)/(tp1+tp2)
Рэ= (10,782*56,8+1,92*56,8)/(56,8+56,8) =7,74кВт
Эквивалентная мощность , приведённая к стандартной ПВ%
Pэк=Кз*Рэ* ПВ/ПВст ,
где Кз-коффициэнт запаса (Кз=1,1 1,3). Принимаем Кз=1,2;
ПВст-стандартная продолжительность включения, ПВст=40%
Рэк=1,2*7,74 34/40 =8,56 кВт
Выбор двигателя постоянного тока (ДПТ)
Согласно [4] номинальная мощность выбираемого двигателя должна быть эквивалентной мощности,
Рэк >Рэн. Выбираем D32
Рном=12кВт; nном=800 мин-1; Uном=220В; Кa =0.28 Ом;
Iном=57А; Iв=1,85А; Р при ПВ=40%=9,5кВт; Iдв=0,425кг*м2
Номинальная угловая скорость
wн=2пn/60,
где n-номинальная частота вращения,
wн=2*3.14*800/60=83.37
Передаточное отношение редуктора
ip=(wн*D/2)/V*60
ip=(83.37*0.4/2)/0.32*60=0.87
2.Расчёт и построение эл./механических характеристик
Похожие работы
... lдв - перегрузочная способность выбранного двигателя. 2. СИЛОВЫЕ ЭЛЕМЕНТЫ ЭЛЕКТРОПРИВОДА Основная задача второго этапа проектирования - выбор комплектного тиристорного электропривода из серии КТЭУ для подъемной установки, принятой на первом этапе проектирования. 2.1. Исходные данные для расчета динамики электропривода Двигатель Тип П2-800-255-8КУ4 Номинальная ...
... силовой преобразовательный агрегат, силовой трансформатор и реакторы, выполнить расчет элементов системы автоматического управления электроприводом, выполнить компьютерное моделирование системы автоматизированного электропривода в типовых режимах. Требования к электроприводу: 1. Обеспечение работы механизма по следующему циклу: • подход детали к резцу с пониженной скоростью; • ...
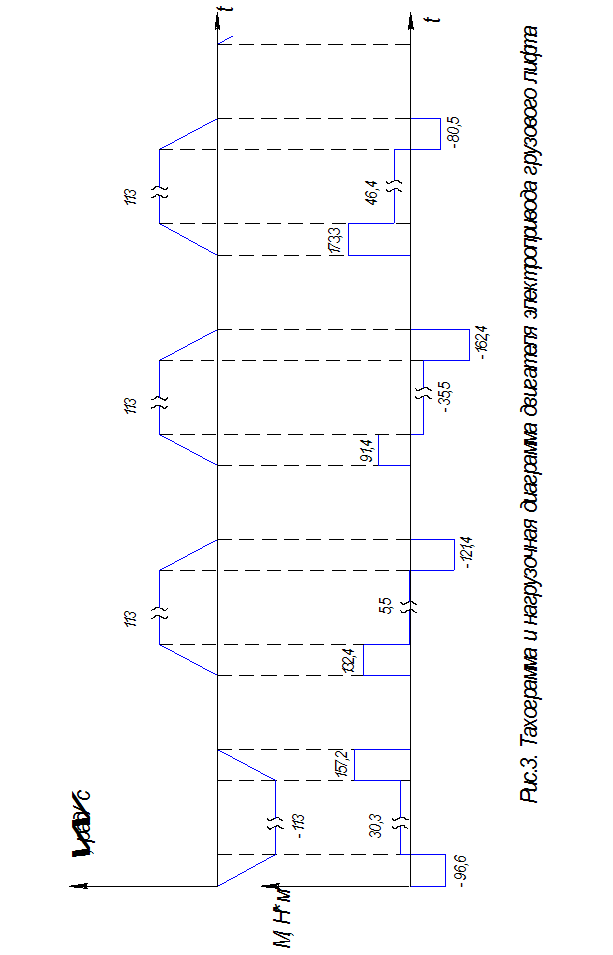
... числа редуктора Расчет передаточного числа редуктора выполняется так, чтобы максимальной скорости рабочего органа механизма соответствовала номинальная скорость двигателя. Для привода грузового лифта: Расчет и построение нагрузочной диаграммы двигателя Для проверки предварительно выбранного двигателя по нагреву выполним построение упрощенной нагрузочной диаграммы двигателя (т.е. ...
... требованиям по перегрузке. 2. Выбор системы управления 2.1 Технико-экономическое обоснование По кривым на рис. 1.3 [2] (с. 12) определяем, что для скорости передвижения тележки V=0.68 м/с и точности остановки v=20 мм требуется обеспечить диапазон регулирования D=1:10. Данному диапазону и установленной мощности электродвигателя удовлетворяют следующие системы управления [2] (табл. ...
0 комментариев