Навигация
1.2. Выбор двигателя
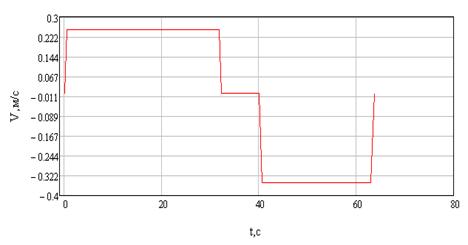
Двигатель постоянного тока параллельного возбуждения выбрать из серии машин длительного режима работы, имеющих рабочую угловую скорость р.
Так как для механизма, работающего с циклической нагрузкой, необходимо выбрать двигатель продолжительного режима, то для этого определяем эквивалентный по нагреву момент:

где Мсi – момент статической нагрузки, соответствующие i-му участку рабочего цикла нагрузочной диаграммы; ti – время работы двигателя на i-м участке; кз = 1,1…1,3 – коэффициент учитывающий отличие нагрузочной диаграммы двигателя от диаграммы статической нагрузки.
Расчётная
мощность двигателя
![]() Вт. Исходя из
Pр ир
по каталогу
[1] выбираем
двигатель П51
с параметрами:
приведёнными
в табл.1.1.
Вт. Исходя из
Pр ир
по каталогу
[1] выбираем
двигатель П51
с параметрами:
приведёнными
в табл.1.1.
Таблица 1.1
Основные параметры двигателя типа П51
| Pн = 3,2 кВт | Uн = 220 [В] | rя+rдп = 1,051 Ом |
| nн = 1000 об/мин | Iн = 18,3 А | rпар = 168 Ом |
| J = 0,35 кгм2 | ||
![]() [c-1].
[c-1].
 [НМ].
[НМ].
1.3. Построение механических и электромеханических характеристик электродвигателя постоянного тока
Построим =f(М) или =f(I) электродвигателя для каждого режима
Пуск в 3 ступени (рис.1.3), торможение противовключением, получение пониженной скорости =0,2р шунтированием цепи якоря (рис.1.4) и возвращение в режим =0 (остановка) путем торможения противовключением (рис. 1.5). Определить параметры резисторов.
Приведём rя+rдп и rпар к рабочей температуре 75С:
rя+rдп=1,0511,22=1,282 Ом ( далее примем rя=1,282Ом );
rпар=1681,22=205,0 Ом.
Постоянная двигателя:
 Вб;
Вб;
 А;
А;
 А.
А.
Скорость идеального х.х.:
 c-1.
c-1.
Скорость в установившемся режиме:
 c-1.
c-1.
Электромеханические характеристики изображены на рис.1.2.
Расчёт пускового реостата аналитическим методом:
![]() А.
А.
Полное сопротивление:
 Ом;
Ом;
 .
.
Ток переключения:
 А..
А..
![]() Ом;
Ом;
![]() Ом;
Ом;
![]() Ом.
Ом.
Сопротивления резисторов:
![]() Ом;
Ом;
![]() Ом;
Ом;
![]() Ом.
Ом.
Получение пониженной скорости =0,2р шунтированием цепи якоря.
По характеристике шунтирования (рис.1.2) находим 0ш=40[c-1]. Через начало координат проводим прямую, параллельную естественной характеристике. В точке пересечения с характеристикой шунтирования (точка А) находим ток IА=45,7[А].
 [Ом];
[Ом];
 ;
;
 [Ом].
[Ом].
Рис.1.3. Схема пуска двигателя в 3 ступени
Рис.1.4. Шунтирование цепи якоря двигателя
Рис. 1.5. Противовключение
Рис.1.6.Естественная схема
Торможение противовключением (рис.1.5.).
II Квадрант. Скорость в точке а3:
![]() c-1;
c-1;
 ;
;
 Ом.
Ом.
IV Квадрант. Скорость в
точке а6 ![]() c-1.
c-1.
 Ом.
Ом.
1.4. Определение предела изменения =f(М) в естественной схеме при колебаниях напряжения в пределах 20%
Естественная схема включения (рис.1.6)
При неизменном
сопротивлении
цепи возбуждения
ток возбуждения
изменяется
в пределах ![]() .
.
По универсальной кривой намагничивания [1] находим:
![]() ;
;
![]() ;
;
![]() ;
;
![]()
Характеристики строим по двум точкам:
 [c-1];
[c-1]; ![]()
 [c-1];
[c-1];![]()
 [c-1];
[c-1];
![]()
 [c-1];
[c-1];
![]()
Характеристики изображены на рис.1.7.
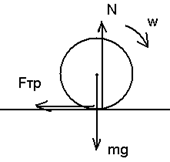
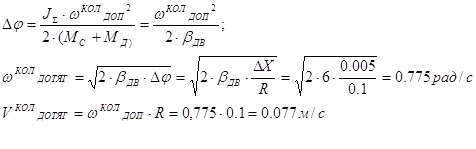
1.5. Построение характеристик электродинамического торможения = f(I), обеспечивающую замедление с ускорениями, не превышающими |доп| Мс = 0,5 Мн
Определим максимальный тормозной момент двигателя
M+Mc=-Jдвдоп;
M=- Jдвдоп-0,5Mн=![]() Нм;
Нм;
![]() ;
;
![]() ;
;
Откуда находим сопротивление rт
 Ом.
Ом.
Характеристика ЭДТ изображена на рис.1.9.
Рис. 1.8. Схема ЭДТ
Рис. 1.9. АЧХ
при воздействии
возмущения
на вал 
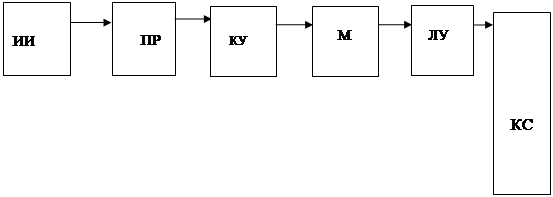
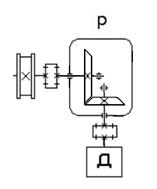
Рис. 1.10. Структурная схема двухмассовой механической системы
1.6. Структурная схема двухмассовой системы механизма передвижения тележки.Структурная схема двухмассовой механической системы представалена на (рис. 1.10.). Приняв J1=Jдв, J2=3J1, 12=1,2 с-1, строим АЧХ при воздействии возмущения на вал механизма.
АЧХ двухмассовой системы:
 ,
,
где ![]() ;
;
![]()
Результат расчета приведён в таблице 1.2, график – на рисунке 1.11.
Таблица 1.2
Значения А() и , с–1
| , [1/c] | A() | , [1/c] | A() | , [1/c] | A() | , [1/c] | A() |
| 0,01 | 71,43 | 0,90 | 1,81 | 1,21 | 70,98 | 1,70 | 0,42 |
| 0,02 | 35,72 | 1,00 | 2,34 | 1,21 | 35,27 | 1,75 | 0,36 |
| 0,03 | 23,82 | 1,03 | 2,58 | 1,22 | 17,42 | 1,80 | 0,32 |
| 0,05 | 14,31 | 1,05 | 2,90 | 1,25 | 6,72 | 1,85 | 0,28 |
| 0,10 | 7,19 | 1,08 | 3,36 | 1,30 | 3,16 | 1,90 | 0,25 |
| 0,20 | 3,67 | 1,10 | 4,07 | 1,35 | 1,99 | 1,95 | 0,22 |
| 0,30 | 2,54 | 1,13 | 5,24 | 1,40 | 1,41 | 2,00 | 0,20 |
| 0,40 | 2,01 | 1,15 | 7,61 | 1,45 | 1,07 | 2,05 | 0,18 |
| 0,50 | 1,73 | 1,18 | 14,74 | 1,50 | 0,85 | 2,10 | 0,16 |
| 0,60 | 1,59 | 1,18 | 18,31 | 1,55 | 0,69 | 2,15 | 0,15 |
| 0,70 | 1,55 | 1,19 | 36,17 | 1,60 | 0,57 | 2,20 | 0,14 |
| 0,80 | 1,61 | 1,20 | 71,88 | 1,65 | 0,49 | 2,25 | 0,13 |
Р
ис.
1.11. АЧХ при воздействии
возмущения
на вал механизма
Рис. 1.12. Характеристика УП-Д
1.7. Расчет и построение =f(М) разомкнутой системы УП-ДЕсли Eп=220 В; внутреннее сопротивление управляемого преобразователя равно: rп=2rяд.
Механическая хар-ка в системе УП-Д имеет вид:
 .
.
График строим по двум точкам:
![]() [c-1];
[c-1];
![]()
 [c-1];
[c-1];
![]()
График изображен на рис.1.12.
1.8. Структурная схема и уравнение статической механической характеристики в системе УП-Д с замкнутой обратной связью по скорости.
Определим коэффициент обратной связи по скорости Кос и задающий сигнал Uзс, если статическая механическая характеристика проходит через точки Мн, н и имеет жесткость в 10 раз большую, чем в разомкнутой системе.
Преобразователь считаем инерционным звеном с коэффициентом усиления Кп=100, постоянной времени Тп=0,01 с и с внутренним сопротивлением rп=2rяд.
 ;
;
![]() ;
;
 ;
;
 ;
;
![]() ;
;
 ;
;
 .
.
Рис. 1.13. Структурная схема системы регулирования скорости
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЕМ ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕНИЯВыбор двигателя.
Согласно заданному варианту, выбрать двигатель последовательного возбуждения тихоходного исполнения.
Тип двигателя: ДП-21.
Таблица 2.1
Основные параметры двигателя типа Д – 21
| Pн=4,5 кВт | rя+rдп=0,94 Ом |
| nн=900 об/мин | rпос=0,275 Ом |
| Iн=28 А | rдв=rя+rдп+rпос=1,215 Ом |
Естественные характеристики рассчитываем по универсальным, приведённым в справочной литературе [1]. Результаты расчётов приведены в табл.2.2., графики - на рис.2.1.,2.2.
Таблица 2.2
Результаты расчётов I, и М
 [НМ].
[НМ].
![]() [А].
[А].
Р
исунок
2.1 Естественная
электромеханическая
характеристика
Рисунок 2.2 Естественная механическая характеристика
![]() [c-1];
[c-1];
![]() [НМ].
[НМ].
Зададимся
пусковым током:![]() [А]
и током переключения:
[А]
и током переключения:![]() [А].
[А].
Полные пусковые сопротивления цепи якоря:
 [Ом];
[Ом];
 [Ом].
[Ом].
Пусковая
диаграмма
приведена на
рис.2.3. Графически
определяем
сопротивления
ступеней реостата:
![]() [Ом];
[Ом];
![]() [Ом].
[Ом].
2.3. Реостатные характеристики =f(I), =f(M)
Если известны координаты рабочей точки: с=0,4н, Mc=Мн. Определяем величину добавочного резистора:
 ;
;
 Ом.
Ом.
Расчёт ведём по формуле:
 .
.
Результаты представлены в табл.2.3., графики - на рис.2.6,2.7.
Рисунок 2.3. Пусковая диаграмма
Рис.2.4. Пуск двигателя в 2 ступени
Рис.2.5. Реостатное включение
Таблица 2.3.
Результаты расчёта
2.4. Построение =f(I), =f(M) при питании двигателя пониженным напряжением U = 0,5Uн
Расчёт ведём по формуле:
 ;
;
Результаты представлены в табл.2.4., графики - на рис.2.8,2.9.
Таблица 2.4.
Результаты расчёта
2.5. Построение =f(M) электродинамического торможения с самовозбуждением, позволяющего производить спуск груза с Мс = 2Мн
Расчет производим для двух случаев: скорость спуска груза равна р1 = н и р2 = 0,5н.
Первый режим:
р1 = н= -94,24 c-1.
Рис. 2.8 Электромеханическая характеристика при пониженом
напряжении
По универсальным характеристикам [1] для заданного Мс находим ток:
Ic=I*Iн=1,6728=46,76 A;
 ;
;
 Ом.
Ом.
При I>Iн характеристику строим по двум точкам: заданной в условии и граничной:
![]() НМ;
НМ;
 c-1.
c-1.
При I
Похожие работы
... при механических, климатических и специальных воздействиях окружающей среды; - специальные требования по защите информации. Построение «автоматизированной системы информационной поддержки наладочных работ электропривода» Дано: 1 Объект информатизации 2 Ограничения 3 Критерий 4 База данных 5 Классификатор характеристик 6 Пакет программ ...
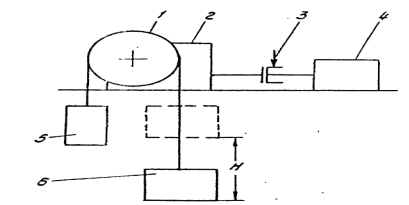
... режим работы, обеспечить выполнение требований по ускорению лифта и возможность его работы с разными грузами на подъем и на спуск. Кинематическая схема электропривода приведена на рисунке 1. Рисунок 1 - Кинематическая схема электропривода грузового лифта:1 – канатоведущий шкив; 2 –редуктор; 3 – тормозной шкив; 4 – двигатель; 5 – клеть; 6 – противовес. Технические данные транспортера ( ...
... требованиям по перегрузке. 2. Выбор системы управления 2.1 Технико-экономическое обоснование По кривым на рис. 1.3 [2] (с. 12) определяем, что для скорости передвижения тележки V=0.68 м/с и точности остановки v=20 мм требуется обеспечить диапазон регулирования D=1:10. Данному диапазону и установленной мощности электродвигателя удовлетворяют следующие системы управления [2] (табл. ...
... до (1000-1500:1 и выше. Нельзя представить себе ни одного современного производственного механизма, в любой области техники, который не приводился бы в действие автоматизированным электроприводом. В электроприводе основным элементом, непосредственно преобразующим электрическую энергию в механическую является электрический двигатель, который чаще всего управляется при помощи соответствующих ...
0 комментариев