Навигация
Построить механические характеристики при частотном регулировании с постоянной мощностью в диапазоне 3:1
17703
знака
3
таблицы
25
изображений
3.3. Построить механические характеристики при частотном регулировании с постоянной мощностью в диапазоне 3:1.
3.4. Рассчитать и построить = f(M), также рассчитать сопротивление добавочного резистора при ЭДТ с независимым возбуждением, если характеристика должна проходить через точку = н, – М = 1,2Мн.
ОГЛАВЛЕНИЕ
МИНИСТЕРСТВО ОБЩЕГО И ПРОФЕССИОНАЛЬНОГО 1
ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ 1
ЛИПЕЦКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ 1
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЕМ ПАРАЛЛЕЛЬНОГО ВОЗБУЖДЕНИЯ 9
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЕМ ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕНИЯ 27
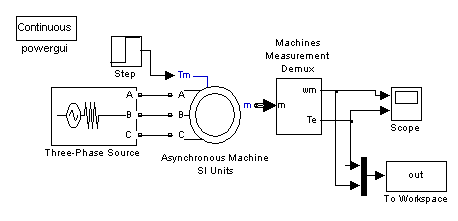
ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ДВИГАТЕЛЕМ 37
ВВЕДЕНИЕ
Автоматизация и электрификация всех отраслей народного хозяйства приводит к облегчению труда рабочих, к уничтожению существенного различия между трудом умственным и физическим, к дальнейшему повышению материального благосостояния людей.
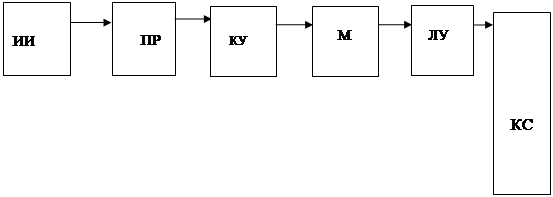
Всякое развитое машинное устройство состоит из трех существенно различных частей: машины-двигателя, передаточного механизма, наконец, машины-орудия или рабочей машины.
Назначение первых двух элементов: двигателя с его системой управления и передаточного механизма, куда могут входить валы, шкивы, ремни, шестерни и т. п., заключается в том, сообщить движение исполнительному механизму.
Следовательно, первая и вторая части машинного устройства служат для приведения в движение рабочей машины. Поэтому их объединяют общим названием «привод».
Сегодня электрический привод представляет собой электромеханическое устройство, предназначенное для приведения в движение рабочего органа машины и управления её технологическим процессом. Он состоит из трёх частей: электрического двигателя, осуществляющего электромеханическое преобразование энергии, механической части, передающей механическую энергию рабочему органу машины. И системы управления, обеспечивающей оптимальное по тем или иным критериям управление технологическим процессом. Характеристики двигателя и возможности системы управления определяют производительность механизма, точность выполнения технологических операций, динамические нагрузки механического оборудования и рад других факторов.
Целью курсовой работы является приобретения навыков расчёта автоматизированного электропривода.
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЕМ ПАРАЛЛЕЛЬНОГО ВОЗБУЖДЕНИЯ
1.1. Построение нагрузочной диаграммы двигателя постоянного тока
Известны следующие параметры механизма:
J=3,6 Нмс2- суммарный момент инерции механизма, приведенный к валу двигателя (с учетом момента инерции самого двигателя) при нагрузке Mc1 и Mc2.
Mc=21Нм - статический момент.
доп=67с-2 - допустимое ускорение.
р=105с-1 - рабочая скорость.
Цикл работы механизмов состоит из подъема груза с моментом Мс1 и опускание с моментом Мс2, а также подъем грузозахватывающего устройства с моментом Мс3 и опускание с Мс4.
Операции содержат режимы пуска, установившейся работы, предварительного понижения скорости и торможения. Продолжительность включения ПВ%=65%, при одинаковом времени пауз.
Характерной особенностью электроприводов инерционных механизмов циклического действия является значительная динамическая нагрузка двигателей в переходных процессах. Относительное время переходных процессов в цикле для этих механизмов также весьма значительно. Поэтому при выборе электродвигателя по нагреву необходимо учитывать динамические нагрузки уже на этапе предварительного выбора. Уменьшение времени переходных процессов обычно ограничено допустимым ускорением (например, по условиям механической прочности). Так как реализация этого ограничения возлагается на привод, то максимальный момент электропривода в переходных процессах также должен быть ограничен.
Определяем эти моменты:
 Нм;
Нм;
![]() Нм;
Нм;
![]() Нм;
Нм;
![]() Нм.
Нм.
Суммарный момент инерции при моментах Мс3 и Мс4:
![]() Нмс2.
Нмс2.
Момент двигателя равен:
![]() Нм.
Нм.
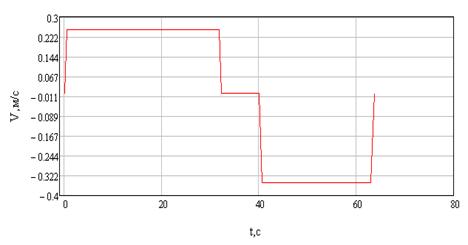
Для построения нагрузочной диаграммы Мс = f(t) и тахограммы = f(t) необходимо определить время пуска, установившейся работы, предварительного понижения скорости и торможения при различных моментах.
Время переходных процессов определяем с использованием основного уравнения движения из формулы:
 с;
с;
![]() с;
с;
 с;
с;
 с;
с;
![]() с;
с;
 с;
с;
![]() с;
с;
 с;
с;
 с;
с;
![]() с;
с;
 с;
с;
 с;
с;
![]() с;
с;
 с.
с.
Время простоя определяется из выражения:
 .
.
Тогда время простоя t0/4 равно:
 с.
с.
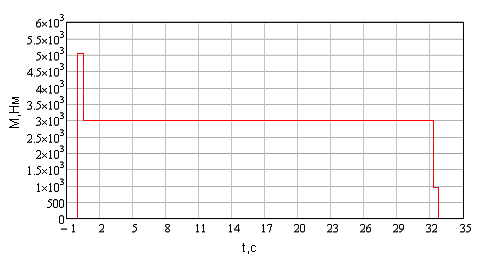
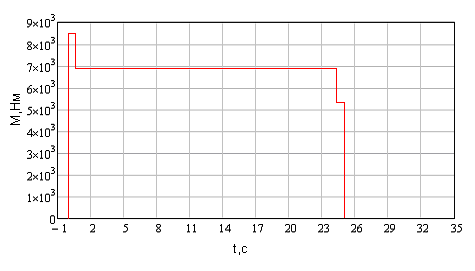
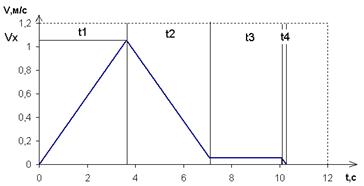
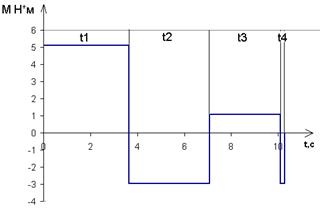
По полученным данным построим нагрузочную диаграмму двигателя (рис. 1.1).
.
Рис. 1.1. Нагрузочная диаграмма двигателя постоянного тока
Похожие работы
... при механических, климатических и специальных воздействиях окружающей среды; - специальные требования по защите информации. Построение «автоматизированной системы информационной поддержки наладочных работ электропривода» Дано: 1 Объект информатизации 2 Ограничения 3 Критерий 4 База данных 5 Классификатор характеристик 6 Пакет программ ...
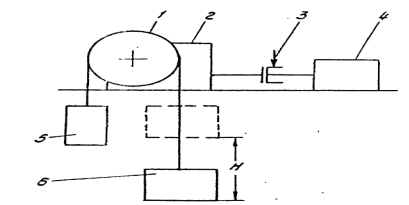
... режим работы, обеспечить выполнение требований по ускорению лифта и возможность его работы с разными грузами на подъем и на спуск. Кинематическая схема электропривода приведена на рисунке 1. Рисунок 1 - Кинематическая схема электропривода грузового лифта:1 – канатоведущий шкив; 2 –редуктор; 3 – тормозной шкив; 4 – двигатель; 5 – клеть; 6 – противовес. Технические данные транспортера ( ...
... требованиям по перегрузке. 2. Выбор системы управления 2.1 Технико-экономическое обоснование По кривым на рис. 1.3 [2] (с. 12) определяем, что для скорости передвижения тележки V=0.68 м/с и точности остановки v=20 мм требуется обеспечить диапазон регулирования D=1:10. Данному диапазону и установленной мощности электродвигателя удовлетворяют следующие системы управления [2] (табл. ...
... до (1000-1500:1 и выше. Нельзя представить себе ни одного современного производственного механизма, в любой области техники, который не приводился бы в действие автоматизированным электроприводом. В электроприводе основным элементом, непосредственно преобразующим электрическую энергию в механическую является электрический двигатель, который чаще всего управляется при помощи соответствующих ...
0 комментариев