Навигация
Спутниковая система ГЛОНАСС
41338
знаков
4
таблицы
3
изображения
Содержание







1. Исторические сведения…………………………………….………..3
2. Структура спутниковых радионавигационных систем…………6
2.1. Подсистема космических аппаратов………………………………7
2.2. Наземный командно-измерительный комплекс………………….8
2.3. Навигационная аппаратура потребителей СРНС………..………9
2.4. Взаимодействие подсистем СРНС в процессе определения
текущих координат спутников…………………………………..………9
3. Основные навигационные характеристики НС…………….……10
4. Решение навигационной задачи……………………………………..13
5. СРНС ГЛОНАСС………………………………………………………14
5.1. Структура и основные характеристики……………………………14
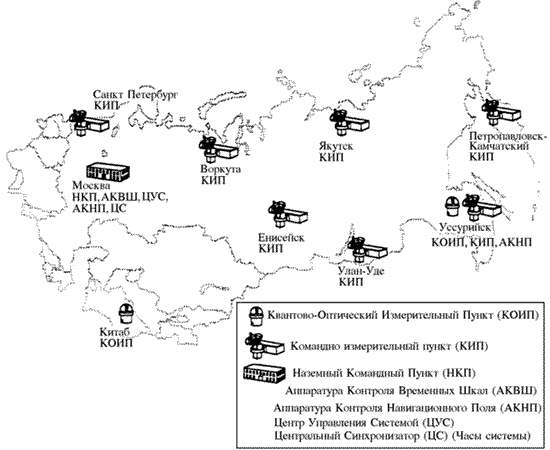
5.2. Назначение и состав подсистемы контроля и управления……..16
5.2.1. Центр управления системой……………………………………..16
5.2.2. Контрольные станции…………………………………………….17
5.2.3. Эфемеридное обеспечение………………………………………..18
5.2.4. Особенности формирования эфемеридной
информации в ГЛОНАСС……………………………………………….18
ЛИТЕРАТУРА……………………………………………………………..19
1. Исторические сведения
Развитие отечественной спутниковой радионавигационной системы (СРНС) ГЛОНАСС имеет уже практически сорокалетнюю историю, начало которой положено, как чаще всего считают, запуском 4 октября 1957 г. в Советском Союзе первого в истории человечества искусственного спутника Земли (ИСЗ). Измерения доплеровского сдвига частоты передатчика этого ИСЗ на пункте наблюдения с известными координатами позволили определить параметры движения этого спутника.
Обратная задача была очевидной: по измерениям того же доплеровского сдвига при известных координатах ИСЗ найти координаты пункта наблюдения.
Научные основы низкоорбитальных СРНС были существенно развиты в процессе выполнения исследований по теме "Спутник" (1958—1959 гг.). Основное внимание при этом уделялось вопросам повышения точности навигационных определений, обеспечения глобальности, круглосуточности применения и независимости от погодных условий.
Проведенные работы позволили перейти в 1963 г. к опытно-конструкторским работам над первой отечественной низкоорбитальной системой, получившей в дальнейшем название "Цикада".
В 1979 г. была сдана в эксплуатацию навигационная система 1-го поколения "Цикада" в составе 4-х навигационных спутников (НС), выведенных на круговые орбиты высотой 1000 км, наклонением 83° и равномерным распределением плоскостей орбит вдоль экватора. Она позволяет потребителю в среднем через каждые полтора-два часа входить в радиоконтакт с одним из НС и определять плановые координаты своего места при продолжительности навигационного сеанса до 5 ... 6 мин.
В ходе испытаний было установлено, что основной вклад в погрешность навигационных определений вносят погрешности передаваемых спутниками собственных эфемерид, которые определяются и закладываются на спутники средствами наземного комплекса управления. Поэтому наряду с совершенствованием бортовых систем спутника и корабельной приемоиндикаторной аппаратуры, разработчиками системы серьезное внимание было уделено вопросам повышения точности определения и прогнозирования параметров орбит навигационных спутников.
Была отработана специальная схема проведения измерений параметров орбит средствами наземно-комплексного управления, разработаны методики прогнозирования, учитывающие все гармоники в разложении геопотенциала.
Проведены работы по уточнению координат измерительных средств и вычислению коэффициентов согласующей модели геопотенциала, предназначенной специально для определения и прогнозирования параметров навигационных орбит. В результате точность передаваемых в составе навигационного сигнала собственных эфемерид была повышена практически на порядок и составляет в настоящее время на интервале суточного прогноза величину » 70 ... 80 м, а среднеквадратическая погрешность определения морскими судами своего местоположения уменьшилась до 80 ... 100 м.
Для оснащения широкого класса морских потребителей разработаны и серийно изготавливаются комплектации приемоиндикаторной аппаратуры "Шхуна" и "Челн". В дальнейшем спутники системы "Цикада" были дооборудованы приемной измерительной аппаратурой обнаружения терпящих бедствие объектов, которые оснащаются специальными радиобуями, излучающими сигналы бедствия на частотах 121 и 406 Мгц. Эти сигналы принимаются спутниками системы "Цикада" и ретранслируются на специальные наземные станции, где производится вычисление точных координат аварийных объектов (судов, самолетов и др.).
Дооснащенные аппаратурой обнаружения терпящих бедствие спутники "Цикада" образуют системы "Коспас". Совместно с американо-франко-канадской системой "Сарсат" они образуют единую службу поиска и спасения, на счету которой уже несколько тысяч спасенных жизней.
Успешная эксплуатация низкоорбитальных спутниковых навигационных систем морскими потребителями привлекла широкое внимание к спутниковой навигации. Возникла необходимость создания универсальной навигационной системы, удовлетворяющей требованиям всех потенциальных потребителей: авиации, морского флота, наземных транспортных средств и космических кораблей.
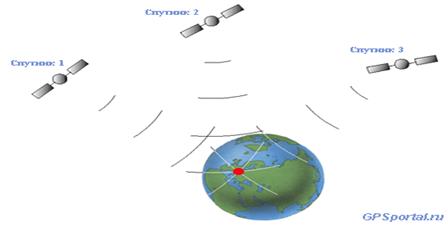
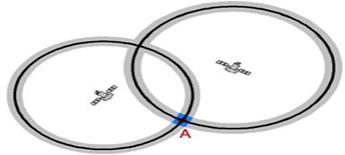
Выполнить требования всех указанных классов потребителей низкоорбитальные системы в силу принципов, заложенных в основу их построения, не могли. Перспективная спутниковая навигационная система должна обеспечивать потребителю в любой момент времени возможность определять три пространственные координаты, вектор скорости и точное время. Для получения потребителей трех пространственных координат беззапросным методом требуется проведение измерений навигационного параметра не менее чем до четырех спутников, при этом одновременно с тремя координатами местоположения потребитель определяет и расхождение собственных часов относительно шкалы времени спутниковой системы.
Исходя из принципа навигационных определений, выбрана структура спутниковой системы, которая обеспечивает одновременную в любой момент времени радиовидимость потребителей, находящимся в любой точке Земли, не менее четырех спутников, при минимальной общем их количестве в системе. Это обстоятельство ограничило высоту орбиты навигационных спутников 20 тыс. км, (дальнейшее увеличение высоты не ведет к расширению зоны радиообзора, а, следовательно, и к уменьшению необходимого количества спутников в системе). Для гарантированной видимости потребителем не менее четырех спутников, их количество в системе должно составлять 18, однако оно было увеличено до 24-х с целью повышения точности определения собственных координат и скорости потребителя путем предоставления ему возможности выбора из числа видимых спутников четверки, обеспечивающей наивысшую точность.
Одной из центральных проблем создания спутниковой системы, обеспечивающей беззапросные навигационные определения одновременно по нескольким спутникам, является проблема взаимной синхронизации спутниковых шкал времени с точностью до миллиардных долей секунды (наносекуд), поскольку рассинхронизация излучаемых спутниками навигационных сигналов в 10 нс вызывает дополнительную погрешность в определении местоположения потребителя до 10 ... 15 м.
Решение задачи высокоточной синхронизации бортовых шкал времен потребовало установки на спутниках высокостабильных бортовых цезиевых стандартов частоты с относительной нестабильностью 1•1013 и наземного водородного стандарта с относительной нестабильностью 1×1014, а также создания наземных средств сличения шкал с погрешностью 3 ... 5 нс.
С помощью этих средств и специального математического обеспечения производится определение расхождений бортовых шкал времени с наземной шкалой и их прогнозирование для каждого спутника системы. Результат прогноза в виде поправок к спутниковым часам относительно наземных закладываются на соответствующие спутники и передаются ими в составе цифровой информации навигационного сигнала. Потребителями таким образом устанавливается единая шкала времени. Расхождение этой шкалы с наземной шкалой времени системы не превышает 15 ... 20 нс.
Второй проблемой создания высокоорбитальной навигационной систем является высокоточное определение и прогнозирование параметров орбит навигационных спутников.
Достижение необходимой точности эфемерид навигационных спутнике потребовало проведения большого объема работ по учету факторов второго порядка малости, таких как световое давление, неравномерность вращения Земли и движение ее полюсов, а также исключение действия на спутник в полете реактивных сил, вызванных негерметичностью двигательных установок газоотделением материалов покрытий.
Для экспериментального определения параметров геопотенциала на орбиты навигационных спутников были запущены два пассивных ИЗС "Эталон ("Космос-1989" и "Космос-2024"), предназначенных для измерения параметров их движения высокоточными квантово-оптическими измерительным средствами. Благодаря этим работам достигнутая в настоящее время точность эфемерид навигационных спутников при прогнозе на 30 ч составляет: вдоль орбиты — 20 м; по бинормали к орбите — 10 м; по высоте 5 м (СКО).
Летные испытания высокоорбитальной отечественной навигационной
системы, получившей название ГЛОНАСС, были начаты в октябре 1982 г. запуском спутника "Космос-1413"..."
В 1995 г. было завершено развертывание СРНС ГЛОНАСС до ее штатного состава (24 НС). В настоящее время предпринимаются большие усилия по поддержанию группировки.
Разработаны самолетная аппаратура АСН-16, СНС-85, АСН-21, наземная аппаратура АСН-15 (РИРВ), морская аппаратура "Шкипер" и "Репер" (РНИИ КП) и др.
Основным заказчиком и ответственным за испытания и управление системами являются Военно-космические силы РФ.
В рассматриваемый период времени в США также проведены интенсивные разработки СРНС. В 1958 г. в рамках создания первого поколения атомных ракетных подводных лодок "Полярис" была создана система "Транзит" (аналог СРНС "Цикада"), введенная в строй в 1964 г.
В начале 70-х годов начаты работы по созданию СРНС второго поколения — ОР5/"Навстар" (аналога отечественной системы ГЛОНАСС). Спутниковая радионавигационная система GPS полностью развернута в 1993 г.
В соответствии с Постановлением Правительства РФ № 237 от 7 марта 1995 г. основными направлениями дальнейших работ являются:
· модернизация СРНС ГЛОНАСС на основе модернизированного спутника ГЛОНАСС-М с повышенным гарантийным сроком службы (пять лет«и более вместо трех в настоящее время) и более высокими техническими характеристиками, что позволит повысить надежность и точность системы в целом;
· внедрение технологии спутниковой навигации в отечественную экономику, науку и технику, а также создание нового поколения навигационной аппаратуры потребителей, станций дифференциальных поправок и контроля целостности;
· разработка и реализация концепции российской широкозонной дифференциальной подсистемы на базе инфраструктуры Военно-космических сил ее взаимодействия с ведомственными региональными и локальными дифференциальными подсистемами, находящимися как на территории России, так и за рубежом;
· развитие сотрудничества с различными международными и зарубежными организациями и фирмами в области расширения использования возможностей навигационной системы ГЛОНАСС для широкого круга потребителей;
· решение вопросов, связанных с использованием совместных навигационных полей систем ГЛОНАСС и GPS в интересах широкого круга потребителей мирового сообщества: поиск единых подходов к предоставлен услуг мировому сообществу со стороны космических навигационных систем, согласование опорных систем координат и системных шкал времени; выработка мер по недопущению использования возможностей космических навигационных систем в интересах террористических режимов и группировок.
Работы в указанных направлениях ведутся в соответствии с требованиями, выдвигаемыми различными потребителями (воздушными, морскими речными судами, наземными и космическими средствами, топогеодезическими, землеустроительными и другими службами).
Структура спутниковых радионавигационных систем
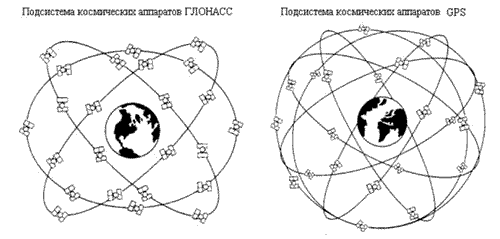
Структура, способы функционирования и требуемые характеристики подсистем СРНС во многом зависят от заданного качества навигационного обеспечения и выбранной концепции навигационных измерений. Для достижения таких важнейших качеств, как непрерывность и высокая точность навигационных определений, в глобальной рабочей зоне в составе современной СРНС типа ГЛОНАСС и GPS функционируют три основные подсистемы (рис. 1):
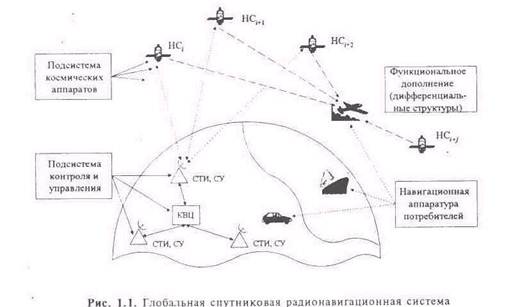
Ø космических аппаратов (ПКА), состоящая из навигационных ИСЗ (в дальнейшем ее называем сетью навигационных спутников (НС) или космическим сегментом);
Ø контроля и управления (ПКУ) (наземный командно-измерительный комплекс (КИК) или сегмент управления);
Ø аппаратура потребителей (АП) СРНС (приемоиндикаторы (ПИ) или сегмент потребителей). Разнообразие видов приемоиндикаторов СРНС обеспечивает потребности наземных, морских, авиационных и космических (в пределах ближнего космоса) потребителей.
Основной операцией, выполняемой в СРНС с помощью этих сегментов, является определение пространственных координат местоположения потребителей и времени, т. е. пространственно-временных координат (ПВК). Эту операцию осуществляют в соответствии с концепцией независимой навигации, предусматривающей вычисление искомых навигационных параметров непосредственно в аппаратуре потребителя. В рамках этой концепции в СРНС выбран позиционный способ определения местоположения потребителей на основе беззапросных (пассивных) дальномерных измерений по сигналам нескольких навигационных искусственных спутников Земли с известными координатами.
Выбор концепции независимой навигации и использование беззапросных измерений обеспечили возможность достижения неограниченной пропускной способности СРНС. По сравнению с зависимой навигацией, не предусматривающей процедуры вычислений ПВК в ПИ СРНС, произошло усложнение аппаратуры потребителей. Однако современные достижения в области технологий сделали возможной реализацию таких подходов при решении проблемы навигационных определений в СРНС.
Высокая точность определения местоположения потребителей обусловлена многими факторами, включая взаимное расположение спутников и параметры их навигационных сигналов. Структура космического сегмента обеспечивает для потребителя постоянную видимость требуемого числа спутников.
В настоящее время считается целесообразным введение в состав СРНС региональных дополнительных систем, обеспечивающих реализацию наиболее строгих требований потребителей. Эти структуры позволяют существенно повысить точность обсерваций, обнаруживать и идентифицировать нарушения в режимах работы СРНС, недопустимое ухудшение качества ее функционирования и своевременно предупреждать об этом потребителей, т. е. они могут осуществлять контроль целостности системы и поддерживать режим дифференциальных измерений.
Похожие работы
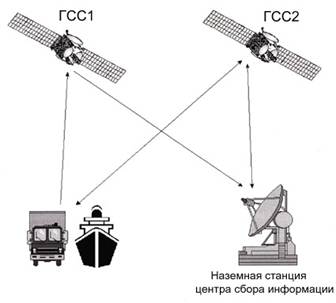
... контроль за перемещением подвижных объектов в центре сбора информации о местоположении и движении объектов или, как иногда это называют, сопровождение подвижных объектов. Спутниковые системы местоопределения подвижных объектов базируются на использовании радиолиний, обеспечивающих передачу сигналов между подвижным объектом, искусственным спутником Земли (ИСЗ) и наземной станцией, При этом ...
... КА системы, альманахи КА, специальные сообщения, параметры, описывающие связь времени GPS с UTC, и прочее. Алгоритмы приема и измерения параметров спутниковых радионавигационных сигналов К сегменту потребителей систем GPS и ГЛОНАСС относятся приёмники сигналов спутников. По измерениям параметров этих сигналов решается навигационная задача. Приёмник можно разделить на три функциональные части ...
... , что считается другими государствами её главным недостатком. Более известна под названием GPS. Единственная полностью работающая спутниковая навигационная система. · ГЛОНАСС Глобальная навигационная спутниковая система (ГЛОНАСС) – советская и российская спутниковая система навигации, разработанная по заказу Министерства обороны СССР. Принадлежит министерству обороны России. Является попыткой ...
... " компьютерные модели эпидемических процессов, которые вместе с информационными моделями составляют "интеллектуальное ядро" ГИС нового класса. 4. Знакомимся с ДубльГИС Одной из самых распространенных социально-направленных ГИС является ДубльГИС. [5]ДубльГИС — бесплатный электронный справочник предприятий с интерактивной картой города. Выпускается одноимённой фирмой и её франчайзи в 35 ...
0 комментариев