Навигация
Решение навигационной задачи
41338
знаков
4
таблицы
3
изображения
4. Решение навигационной задачи
Основным содержанием навигационной задачи (НЗ) в СРНС является определение пространственно-временных координат потребителя, а также составляющих его скорости, поэтому в результате решения навигационной задачи должен быть определен расширенный вектор состояния потребителя П, который в инерциальной системе координат можно представить в виде ![]() . Элементами данного вектора служат пространственные координаты (х, у, z) потребителя, временная поправка t' шкалы времени потребителя относительно системной ШВ, а также составляющие вектора скорости
. Элементами данного вектора служат пространственные координаты (х, у, z) потребителя, временная поправка t' шкалы времени потребителя относительно системной ШВ, а также составляющие вектора скорости ![]() .
.
Элементы вектора потребителя недоступны непосредственному измерению с помощью радиосредств. У принятого радиосигнала могут измеряться те или другие его параметры, например задержка или доплеровское смещение частоты. Измеряемый в интересах навигации параметр радиосигнала называют радионавигационным (РНП), а соответствующий ему геометрический параметр — навигационным (НП), поэтому задержка сигнала t и его доплеровское смещение частоты ![]() являются радионавигационными параметрами, а соответствующие им дальность до объекта Д и радиальная скорость сближения объектов
являются радионавигационными параметрами, а соответствующие им дальность до объекта Д и радиальная скорость сближения объектов ![]() служат навигационными параметрами. Связь между этими параметрами дается соотношениями:
служат навигационными параметрами. Связь между этими параметрами дается соотношениями:
![]()
де с — скорость света; l — длина волны излучаемого НС сигнала.
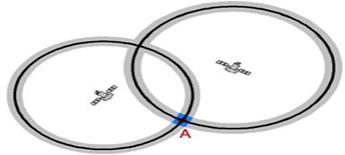
Геометрическое место точек пространства с одинаковым значением навигационного параметра называют поверхностью положения. Пересечение двух поверхностей положения определяет линию положения — геометрическое место точек пространства, имеющих два определенных значения двух навигационных параметров. Местоположение определяется координатами точки пересечения трех поверхностей положения или двух линий положения. В ряде случаев (из-за нелинейности) две линии положения могут пересекаться в двух точках. При этом однозначно найти местоположение можно, только используя дополнительную поверхность положения или иную информацию о местоположении объекта.
Для решения навигационной задачи, т. с. для нахождения вектора потребителя П, используют функциональную связь между навигационными параметрами и компонентами вектора потребителя. Соответствующие функциональные зависимости принято называть навигационными функциями. Конкретный вид навигационных функций обусловлен многими факторами: видом НП, характером движения НС и потребителя, выбранной системой координат и т.д.
Навигационные функции для пространственных координат потребителя можно определить с помощью различных разновидностей дальномерных, разностно-дальномерных, угломерных методов и их комбинаций. Для получения навигационных функций, включающих составляющие вектора скорости потребителя, используют радиально-скоростные методы.
5. СРНС ГЛОНАСС
5.1. Структура и основные характеристики
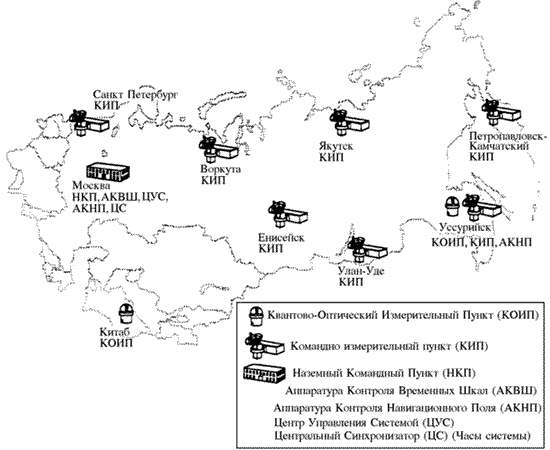
Отечественная сетевая среднеорбитальная СРНС ГЛОНАСС (ГЛОбальная НАвигационная Спутниковая Система) предназначена для непрерывного и высокоточного определения пространственного (трехмерного) местоположения вектора скорости движения, а также времени космических, авиационных, морских и наземных потребителей в любой точке Земли или околоземного пространства. В настоящее время она состоит из трех подсистем:
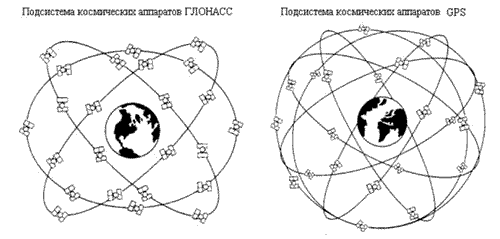
· подсистема космических аппаратов (ПКА), состоящая из навигационных спутников ГЛОНАСС на соответствующих орбитах;
· подсистема контроля и управления (ПКУ), состоящая из наземных пунктов контроля и управления;
· аппаратуры потребителей (АП).
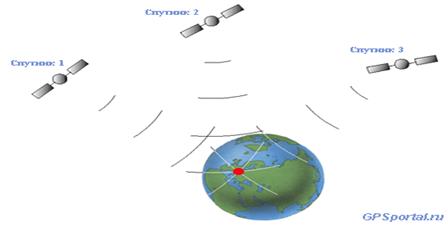
Навигационные определения в ГЛОНАСС осуществляются на основе опросных измерений в аппаратуре потребителей псевдодальности и радиальной псевдоскорости до четырех спутников (или трех спутников при использовании дополнительной информации) ГЛОНАСС, а также с учетом принятыx навигационных сообщений этих спутников. В навигационных сообщениях, передаваемых с помощью спутниковых радиосигналов, содержится информация о различных параметрах, в том числе и необходимые сведения о положении и движении спутников в соответствующие моменты времени. В результате обработки этих данных в АП ГЛОНАСС обычно определяются три (две) координаты потребителя, величина и направление вектора его земной (путевой) скорости, текущее время (местное или в шкале Госэталона Координированного Всемирного Времени UTC(SU) или, по другому, UТC(ГЭВЧ) (ГЭВЧ — Государственный эталон времени и частоты). Основные характеристики СРНС ГЛОНАСС приведены в табл. 1 — 2, где для сравнения приведены сведения об американской срсдневысотной СРНС GPS. В табл. 1 приведены общесистемные характеристики СРНС ГЛОНАСС. В табл. 2 приведены как стандартные значения характеристик СРНС, так и их оценки на основе данных, полученных в 1993—1995 гг. Последние показаны в скобках, причем для С/А-кода, кода стандартной точности) значения приводятся для вариантов работы с А/без SA (SA — Selective Availability — селективный доступ) ).
Таблица 1. Системные характеристики СРНС ГЛОНАСС
| Параметр, способ | ГЛОНАСС | GPS |
| Число НС (резерв) | 24 (3) | 24 (3) |
| Число орбитальных плоскостей | 3 | 6 |
| Число НС в орбитальной плоскости | 8 | 4 |
| Тип орбит | Круговая (е =0±0,01) | Круговая |
| Высота орбит, км | 19100 | 20145 |
| Наклонение орбит, 1рад | 64,8±0,3 | 55 (63) |
| Драконический период обращения НС | 11ч 15 мин 44 с ±5 с | 11 ч 56,9 мин |
| Способ разделения сигналов НС | Частотный | Кодовый |
| Несущие частоты навигационных радиосигналов МГц: | ||
| L1 | 1602,5625...1615,5 | 1575.42 |
| L2 | 1246,4375...1256,5 | 1227,6 ! |
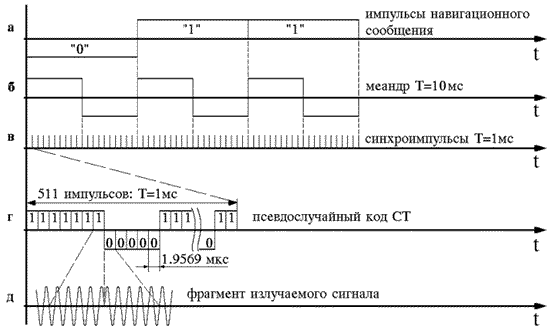
| Период повторения ПСП | 1 мс | 1 мс (С/А-код) |
| (дальномерного кода или его сегмента) | 7 дн (Р-код) | |
| Тактовая частота ПСП, МГц | 0,511 | 1,023 (С/А-код) |
| 10,23 (P,Y-код) | ||
| Скорость передачи цифровой информации | ||
| (соответственно СИ- и D- код), бит/с | 50 | 50 |
| Длительность суперкадра, мин | 2,5 | 12,5 |
| Число кадров в суперкадре | 5 | 25 ; |
| Число строк в кадре | 15 | 5 |
| Система отсчетов времени | UTC(SU) | UTC(USNO) . |
| Система отсчета пространственных | ||
| координат | ПЗ-90 | WGC-84 |
| Тип эфемерид | Геоцентрические | Модифициро- |
| координаты и их | ванные кепле- | |
| производные | ровы элементы |
Таблица 2. Точностные характеристики СРНС | ||||||
| Параметр | Точность измерений | |||||
| GPS (P=0,95) | ГЛОНАСС (P=0,997) | |||||
| Горизонтальная плоскость, м | 100 (72/18) 300 (Р=0.9999) 18 | (С/А-код) (С/А-код) (Р-, Y-код! | 60 (СТ-код) (39) | |||
| Вертикальная плоскость, м | 156 28 | (135/34) | (С/А-кол) (Р-, Y-код) | 75 (СТ-код) (67,5) | ||
| Скорость, см/с | < 200 20 | (С/А-код ) (Р-. Y-код) | 15 (С'1-код) | |||
| Ускорение, мм/с2 | 8 <19 | (С/А-код) (С/А-код ) | — | |||
| Время, мкс | 0,34 0,18 код) | (С/А-код ) (Р-, Y- | 1 (CI-код) | |||
Похожие работы
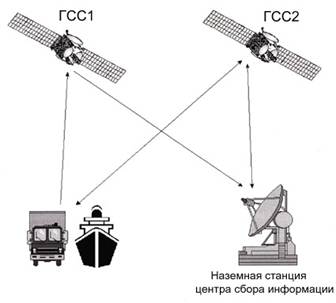



... контроль за перемещением подвижных объектов в центре сбора информации о местоположении и движении объектов или, как иногда это называют, сопровождение подвижных объектов. Спутниковые системы местоопределения подвижных объектов базируются на использовании радиолиний, обеспечивающих передачу сигналов между подвижным объектом, искусственным спутником Земли (ИСЗ) и наземной станцией, При этом ...
... КА системы, альманахи КА, специальные сообщения, параметры, описывающие связь времени GPS с UTC, и прочее. Алгоритмы приема и измерения параметров спутниковых радионавигационных сигналов К сегменту потребителей систем GPS и ГЛОНАСС относятся приёмники сигналов спутников. По измерениям параметров этих сигналов решается навигационная задача. Приёмник можно разделить на три функциональные части ...



... , что считается другими государствами её главным недостатком. Более известна под названием GPS. Единственная полностью работающая спутниковая навигационная система. · ГЛОНАСС Глобальная навигационная спутниковая система (ГЛОНАСС) – советская и российская спутниковая система навигации, разработанная по заказу Министерства обороны СССР. Принадлежит министерству обороны России. Является попыткой ...

... " компьютерные модели эпидемических процессов, которые вместе с информационными моделями составляют "интеллектуальное ядро" ГИС нового класса. 4. Знакомимся с ДубльГИС Одной из самых распространенных социально-направленных ГИС является ДубльГИС. [5]ДубльГИС — бесплатный электронный справочник предприятий с интерактивной картой города. Выпускается одноимённой фирмой и её франчайзи в 35 ...
0 комментариев