Тема данной курсовой работы – " Сравнительный анализ алгоритмов построения выпуклой оболочки на плоскости". Для сравнения взяты четыре алгоритма: обход методом Грэхема, быстрый метод, метод “разделяй и властвуй” и динамический метод. Задача этой работы – раскрыть эти алгоритмы и провести исследования эффективности их.
Программная часть для курсовой работы выполнена на Borland Delphi 4.
Оглавление
Аннотация 2
Введение 4
Предварительная разработка алгоритма построения выпуклой оболочки 7
Метод обхода Грэхема 9
Быстрые методы построения выпуклой оболочки. 11
Алгоритмы типа “разделяй и властвуй”. 12
Динамические алгоритмы построения выпуклой оболочки 14
Сравнительный анализ алгоритмов построения выпуклой оболочки 17
Выводы 20
Заключение 21
Приложение Unit1.pas 22
Литература 34
ВведениеМножество различных задач вычислительной геометрии связано с построением выпуклой оболочки. В настоящий момент эта задача хорошо исследована и имеет широкое применение в распознавании образов1, обработке изображений2, а так же в задачах в задаче раскроя и компоновки материала3.
Само понятие выпуклой оболочки является довольно простым и интуитивно понятным. Если представить резиновый шнур, натянутый на множество точек, то это и будет выпуклая оболочка для данного множества точек. Но, не смотря на свою простоту, оно не конструктивно, поэтому далее будут рассмотрены способы построения эффективных алгоритмов для построения выпуклой оболочки. Так как алгоритмы для решения нашей задачи, как правило, являются подзадачами других, более сложных задач, то интерес представляют только алгоритмы имеющие сложность O(N log N).
Само понятие выпуклой оболочки является довольно простым и интуитивно понятным. Если представить резиновый шнур, натянутый на множество точек, то это и будет выпуклая оболочка для данного множества точек. Но, не смотря на свою простоту, оно не конструктивно, поэтому далее будут рассмотрены способы построения эффективных алгоритмов для построения выпуклой оболочки. Так как алгоритмы для решения нашей задачи, как правило, являются подзадачами других, более сложных задач, то интерес представляют только алгоритмы имеющие сложность O(N log N).
Для начала, несколько определений:
Определение 1. Область D принадлежащая пространству E2, будет называться выпуклой, если для любой пары точек q1 иq2 из D отрезок q1q2 целиком принадлежит D.
Определение 2. Выпуклой оболочкой множества точек S, принадлежащих пространству E2, называется граница наименьшей выпуклой области в E2, которая охватывает S.
Далее будем иметь дело только с множествами, состоящими из конечного числа точек. Поэтому чтобы охарактеризовать структуру выпуклой оболочки нам нужно обобщить понятия выпуклого многоугольника.
Определение 3. Полиэдральным множеством или политопом называется пересечение конечного множества замкнутых полупространств.
Следующая теорема характеризует выпуклые оболочки в нужном нам плане.
Теорема 14. Выпуклая оболочка конечного множества точек в Ed является выпуклым политопом. Наоборот, каждый выпуклый политоп является выпуклой оболочкой конечного множества точек.
Прежде чем переходить к описанию алгоритмов следует произвести постановку задач и определить нижние оценки для решения их. Так как алгоритмы имеют дело с границей выпуклой оболочки множества L conv(L), то введем для нее обозначение CH(L) и будем ее также называть выпуклой оболочкой.
Сформулируем две основные задачи:
Задача ВО1. (Выпуклая оболочка). В E2 задано множество S, содержащее N точек. Требуется построить их выпуклую оболочку (т.е. полное описание границы CH(S)).
Задача ВО2. (Открытый алгоритм для выпуклой оболочки). На плоскости задана последовательность из N точек p1, …, pN. Требуется найти выпуклую оболочку таким образом, чтобы, после обработки точки pi имелась CH({p1, …, pi}).
Рассмотрим ВО1. То, что вершины многоугольника, являющегося выпуклой оболочкой, следуют в определенном порядке, указывает на связь с задачей сортировки. В самом деле, следующая теорема показывает то, что решение ВО1 должно быть в состоянии выполнить сортировку.
Теорема 2. Задача сортировки за линейное время сводится к задаче построения выпуклой оболочки, и, следовательно, для нахождения упорядоченной выпуклой оболочки для N точек на плоскости требуется время (N log N).
Доказательство. Сведем задачу сортировки N положительных действительных чисел x1,.., xN к задаче ВО1. Поставим в соответствие числу xi точку (xi, xi2) и присвоим ей номер i. Выпуклая оболочка этого множества, представленная в стандартном виде будет представлять собой упорядоченное относительно значения абсциссы множество всех точек из исходного. Из него за линейное время можно получить отсортированный список.
Очевидно, что если мы можем решать ВО2, то мы можем решить и ВО1, по-этому задача ВО1 может быть сведена к ВО2 за линейное время. Следовательно, нижняя оценка для ВО2 не ниже (N log N).
Предварительная разработка алгоритма построения выпуклой оболочкиДля начала рассмотрим несколько малопродуктивных алгоритмов построения выпуклой оболочки.
Определение 3. Точка p выпуклого множества S называется крайней, если не существует пары точек a, b S таких, что p лежит на открытом отрезке ab.
Очевидно, что подмножество крайних точек E является наименьшим подмножеством S, выпуклая оболочка которого, является выпуклой оболочкой множества S, или conv(E)=conv(S). Поэтому нам необходимо для нахождения выпуклой оболочки выполнить два шага:
Определить крайние точки.
Упорядочить эти точки так, чтобы они образовали выпуклый многоугольник.
Теорема 3. Точка p не является крайней точкой множества S только тогда когда она лежит в некотором треугольнике, вершинами которого принадлежат S, но сама она не является вершиной этого треугольника.
Эта теорема дает возможность построить алгоритм проверки крайности точки. Если мы имеем дело с множеством S мощности N, то можно построить O(N3) треугольников. Проверка принадлежности точки треугольнику выполняется за постоянное количество операций. Следовательно, за время O(N3) можно определить, является ли точка крайней, а за O(N4) и для всех точек.
Следующая теорема показывает, – в каком порядке должны быть точки в конечном множестве.
Теорема 4. Последовательные вершины выпуклого многоугольника располагаются в порядке, соответствующем изменению угла относительно любой внутренней точки.
Упорядочить крайние точки множества можно относительно их центроида. Центроид множества для N точек вычисляется за время O(N) арифметических операций. Грэхем предложил использовать для этого только три любые неколлинеарные точки множества S. В худшем случае это требует время O(N), но почти всегда это первые три точки.
Упорядочить их можно за время O(N log N). Таким образом, мы решаем задачу ВО1 за время O(N4).
Метод обхода Грэхема
Приведенный выше алгоритм является неэффективным, поэтому необходим способ более быстрого построения выпуклой оболочки. Для этого нам необходим другой подход.
Грэхэм в одной из первых своих работ сумел показать, как можно, предварительно отсортировав точки относительно полярного угла с центром в какой-нибудь внутренней точке, можно найти крайние точки за линейное время5.
Пусть центр координат в какой-нибудь внутренней точке. Упорядочим точки относительно полярного угла, а если таковые совпадают относительно расстояния от центра координат. Так как обе точки лежат на одной прямой проходящей через центр координат, то для сравнения нам нет необходимости вычислять расстояние, а можно сравнивать сумму абсолютных значений координат.
Отсортированные точки следует поместить в двусвязный список. Так как внутренние точки принадлежат некоторому треугольнику (Opq), где p и q – соседние вершины точке выпуклой оболочки. Суть алгоритма в последовательном просмотре отсортированного списка и удалении внутренних вершин. Оставшиеся точки будут являться вершинами выпуклой оболочки.
Просмотр начнем с точки являющейся вершиной ВО. Для этого можно взять точку с минимальной абсциссой, а если их несколько, то и минимальной ординатой и пометить как начальную. После чего, обходим список, начиная с нее, против часовой стрелки и проверяем внутренний угол для текущей точки. Если он больше либо равен , то удаляем вершину, а иначе переходим к следующей. Так как за каждый просмотр мы или удаляем одну вершину, или переходим к следующей, а просмотр заканчиваем при достижении вершины начало, которая не удалится, то мы выполняем не более N шагов. Рассмотренный метод называют методом обхода Грэхема.
Теорема 5. Выпуклая оболочка N точек на плоскости может быть найдена за время O(N log N) при памяти O(N) с использованием только арифметических операций и сравнений.
Доказательство. Из предыдущего алгоритма видно, что в нем используются только арифметические операции и сравнения. Для нахождения внутренней точки и обхода требуется линейное время, а на сортировку уходит O(N log N). Для представления списка нам достаточно O(N) памяти.
Так как выше было доказано, что нижняя оценка для алгоритма решающего эту задачу равна O(N log N), то получаем, что обход Грэхема имеет оптимальное время выполнения. Но он является оптимальным в худшем случае, а поведение его в среднем мы не изучили. Этот алгоритм имеет несколько недостатков.
В нем используются тригонометрические функции, а так как их вычисление связано с большими затратами по времени, то желательно от них избавиться. Эндрю предложил метод решения этой проблемы6.
Если на плоскости заданы N точек, то существует самая левая и самая правая точки, и они являются вершинами выпуклой оболочки. Прямая, проходящая через эти точки делит множество на две части. Это точки, которые лежат выше и точки, которые ниже прямой. Оба множества порождают соответствующие им части выпуклой оболочки, причем они являются монотонными ломаными относительно оси x. Поэтому, отдельно отсортировав эти множества по значению абсциссы, производится обход Грэхема.
Недостатками алгоритма являются и то, что он не открытый, а так же не допускает разбиение исходной задачи на подзадачи для параллельной обработки.
Быстрые методы построения выпуклой оболочки.
Для построения выпуклой оболочки можно создать алгоритмы построения выпуклой оболочки, напоминающие быструю сортировку. Такие алгоритмы называются быстрыми методами построения оболочки.
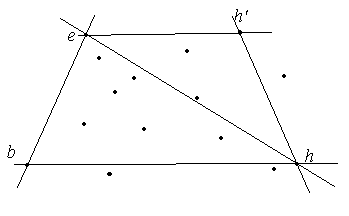
Рис. 1: h – самая удаленная от bl точка.
Суть алгоритма состоит в том, что исходное множество S из N точек разбивается на два подмножества, каждое из которых будет содержать одну из двух ломаных, которые при соединении образуют выпуклую оболочку. Для начала нужно определить две точки, которые будут являться соседними вершинами выпуклой оболочки. Можно взять самую левую вершину, пусть это будет b, и самую левую относительно b из оставшихся, пусть это будет e. После чего нужно найти точку h максимально удаленную от прямой be. Все точки, лежащие в треугольнике bel исключаются из дальнейшего рассмотрения. Остальные точки будут делиться на два подмножества: точки, которые лежать левее bh и eh, и точки, которые лежат правее и bh, и eh. Каждое из них содержит ломаные которые в сочетании с e, b и h дают выпуклую оболочку. С каждым из них проделываем то же самое. В подмножестве точек S’, лежащих левее bh и eh выбираем h’, максимально удаленную от eh, которая делит его на три части. Из них одна выбрасывается, а остальные делятся опять. Это реализуется рекурсивной процедурой, которая для данного ей множества возвращает соответствующую часть выпуклой оболочки.
В случае, когда мощность каждого, из подмножеств, на которое делится множество, не превосходит некоторой константы умноженной на мощность множества, получаем сложность алгоритма, как и в быстрой сортировке O(N log N). Но в худшем случае может потребоваться время O(N 2).
Алгоритмы типа “разделяй и властвуй”.
В данном алгоритме, в отличие от предыдущего, множество S разбивается на два равномощных подмножества S’ и S’’, а затем рекурсивно строятся отдельно оболочки для каждого из них и объединяются.
CH(S) = CH(S’ S’’) = CH(CH(S’) CH (S’’))
Сложность этого метода состоит в эффективном нахождении слияния двух выпуклых оболочек. Следующий алгоритм слияния был предложен Шеймосом7:
Пусть у нас есть выпуклые многоугольники P’ и P’’. Нам требуется найти P – их слияние. Этого берется любая внутренняя точка p для P’ и проверяется на принадлежность P’’. Если она принадлежит, то по теореме 4 мы имеем два упорядоченных относительно полярного угла к p множества. За время равное сумме точек в них мы можем из них получить один упорядоченный список. После чего, используя обход Грэхема за такое же время получить требуемый выпуклый многоугольник.
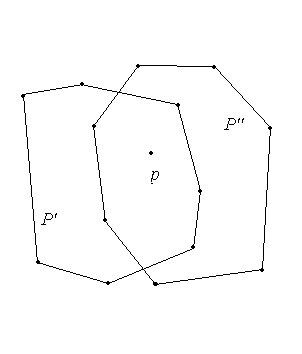
Рис. 2: Так как точка p внутри обоих многоугольников, то вершины, как одного, так и второго, упорядочены относительно полярного угла к p.
В случае, когда p не принадлежит P’’, придется найти левую и правую опорные прямые из p к P’’, pl и pr соответственно. Опорной прямой к выпуклому многоугольнику P будем называть прямую l, проходящую через некоторую вершину этого многоугольника, таким образом, что внутренность P находится по одну сторону от l. Для этого нам достаточно время O(N). Все вершины P’’ между l и r, при движении от l к r против часовой стрелки, убираем из рассмотрения и выполняем те действия, которые выполняли в случае принадлежности.
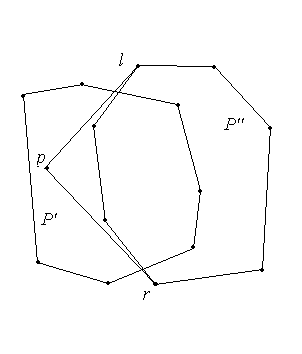
Рис. 3: Так как точка p внутри одного многоугольника, то удаляем все видимые из p вершины второго многоугольника.
Как видно, и в этом случае на слияние требуется время O(N), где N – это общее количество точек в многоугольниках. Отсюда следует теорема:
Теорема 6. Выпуклая оболочка объединения двух выпуклых многоугольников может быть найдена за время, пропорциональное суммарному числу их вершин.
Динамические алгоритмы построения выпуклой оболочки
Все приведенные алгоритмы не являются открытыми, так как требуют изначально знать все точки множества S. Но в некоторых случаях требуется иметь алгоритм способный при поступлении новой точки изменять выпуклую оболочку. В данном случае мы имеем дело с задачей ВО2.
Очевидно, что решение задачи существует. Можно каждый раз после поступления точки использовать обход Грэхема и получить алгоритм со сложностью O(N2 log N), но хотелось бы не приносить в жертву оценку O(N log N).
Для этого следует обратить внимание на то, что каждую новую точку алгоритм должен или отбрасывать, или вставлять его в список точек образующих выпуклую оболочку. Чтобы получить это оценку, мы на каждую точку должны тратить время O(log N), то есть мы должна находить место вставки и вставлять точку за O(log N). Такой алгоритм построил Препарата8.
В этом алгоритме необходимо быстро находить опорные прямые к выпуклому многоугольнику P и проходящие через некоторую точку p. После этого одну из цепей, на которые разбивают опорные точки границу выпуклого многоугольника, заменить на p.
Будем называть опорную прямую pl левой, если многоугольник P лежит справа от pl, и соответственно прямую pr правой, если слева. Точки l и r будем называть опорными. Так же будем различать вогнутые вершины, т.е. те для которых отрезок, соединяющий их и p, пересекает внутренность многоугольника. А те, которые ни вогнутые и ни опорные будут выпуклыми.
При поверке какой-то вершины на вогнутость или выгнутость мы можем определить, где искать опорную точку. Тык же мы должны иметь возможность быстро удалить цепочку вершин и вставить место нее p. Для этого нам нужно хранить многоугольник не писком, как это делалось в предыдущих алгоритмах, а AWL или другим сбалансированным деревом.
В этом дереве T переход к левому потомку будет соответствовать движению по часовой стрелке по выпуклой оболочке, а для правого против часовой стрелки. Для каждого узла в этом дереве мы должны иметь возможность получать доступ к самой левому узлу. Если рассмотреть корневой узел дерева M и m – самый левый узел, то они разбивают границу выпуклого многоугольника на две цепи, причем одна хранится в левом поддереве M, а вторая в правом. В зависимости от типа вершины М и m, а также от того, какой угол (mpM) – левый или правый, можно определить в каком поддереве находится опорная вершина.
Рассмотрим поиск левой опорной вершины. Если (mpM) – левый а m – вогнутая или то (mpM) – правый а M – выпуклая, то поиск нежно продолжать в левом поддереве, иначе – в правом. Аналогично и для правой опорной вершины.
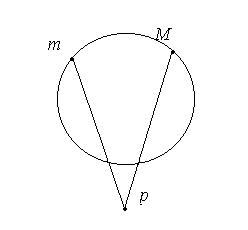
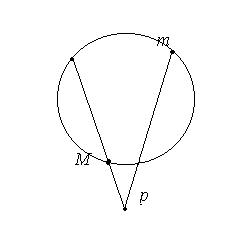
Рис. 4: Два варианта для m, M и p.
Таким способом мы находим за время O(log i) левую и правую опорные прямые. После этого за время O(log i) мы можем удалить все выпуклые вершины и сбалансируем дерево. Отсюда следует теорема:
Теорема 7. Выпуклая оболочка множества из N точек на плоскости может быть найдена с помощью открытого алгоритма за время (N log N) и со временем коррекции (log N).
Сравнительный анализ алгоритмов построения выпуклой оболочки
Так как теоретически показали, что время работы всех алгоритмов в среднем O(log N), то следует ожидать при тестировании почти всегда результаты отличающиеся на константу.
Проведем исследования зависимости времени работы алгоритмов от размеров задачи при равномерном распределении точек:
Рис. 5: Зависимость время выполнения алгоритмов при равномерном случайном расположении точек (Nq^.y)) then
begin
e:=q;
cut(q,e);
ins(b,e);
end else
begin
e:=p;
cut(p,e);
ins(b,e);
end;
end;
if pnil then
begin
e:=p;
inss(b,e,e^.prev);
end;
if qnil then
begin
e:=q;
inss(b,e,e^.prev);
end;
end;
procedure sort2(var b:prec;e:prec);
var p,q:prec;
x:tp;
begin
if b=e then exit;
if b^.next=e then
begin
if (b^.xabs(t^.x-x)+abs(t^.y-y))) then r:=t;
t:=t^.n;
until t=l2;
l2:=r;
l1^.p^.n:=nil;
l2^.p^.n:=nil;
r:=l1;
l:=l2;
ls:=nil;
while (rnil) and (lnil) do
begin
if (r^.a(m^.x-p^.x)*(m^.n^.y-p^.y)))
then
begin
l:=m;
exit;
end;
if (n^.n=n) or
(((n^.n^.x-p^.x)*(n^.y-p^.y)=(n^.x-p^.x)*(n^.n^.y-p^.y)) and (abs(n^.x-p^.x)=abs(n^.n^.x-p^.x)+abs(n^.n^.x-n^.x)) and (abs(n^.y-p^.y)=abs(n^.n^.y-p^.y)+abs(n^.n^.y-n^.y))) or
(((n^.p^.x-p^.x)*(n^.y-p^.y)>(n^.x-p^.x)*(n^.p^.y-p^.y)) and ((n^.n^.x-p^.x)*(n^.y-p^.y)>(n^.x-p^.x)*(n^.n^.y-p^.y)))
then
begin
l:=n;
exit;
end;
if m^.nm then
begin
fm:=((m^.n^.x-p^.x)*(m^.y-p^.y)>(m^.x-p^.x)*(m^.n^.y-p^.y)) or
((m^.p^.x-p^.x)*(m^.y-p^.y)(n^.x-p^.x)*(n^.n^.y-p^.y)) or
((n^.p^.x-p^.x)*(n^.y-p^.y)(n^.x-p^.x)*(m^.y-p^.y);
if (m^.lnil) and ((f and not(fn)) or (not(f) and fm)) then
getleft(m^.l,n,l)
else if m^.rnil then
getleft(m^.r,m^.n,l);
end;
end;
procedure getright(m,n:prec;var l:prec);
var fm,fn,f:boolean;
begin
l:=nil;
if ((p^.x=m^.x) and (p^.y=m^.y)) or ((p^.x=n^.x) and (p^.y=n^.y)) then exit;
if ((p^.x=m^.p^.x) and (p^.y=m^.p^.y)) or ((p^.x=n^.p^.x) and (p^.y=n^.p^.y)) then exit;
if (m^.n=m) or
(((m^.p^.x-p^.x)*(m^.y-p^.y)=(m^.x-p^.x)*(m^.p^.y-p^.y)) and (abs(m^.x-p^.x)=abs(m^.p^.x-p^.x)+abs(m^.p^.x-m^.x)) and (abs(m^.y-p^.y)=abs(m^.p^.y-p^.y)+abs(m^.p^.y-m^.y))) or
(((m^.p^.x-p^.x)*(m^.y-p^.y)m^.kl+1 then
begin
k:=m^.r;
if k^.kl>k^.kr then
k:=k^.l;
if k^.u^.r=k then
k^.u^.r:=k^.r
else
k^.u^.l:=k^.r;
if k^.u^.r=k then
k^.u^.kr:=k^.kr
else
k^.u^.kl:=k^.kr;
if k^.rnil then k^.r^.u:=k^.u;
r:=m^.r;
kr:=m^.kr;
m^.r:=k^.l;
m^.kr:=k^.kl;
if k^.lnil then k^.l^.u:=m;
k^.r:=r;
k^.kr:=kr;
r^.u:=k;
k^.l:=m;
m^.u:=k;
if unil then
begin
if u^.l=m then
u^.l:=k
else
u^.r:=k;
end
else t:=k;
k^.u:=u;
balance(m,t,false);
end;
if f then balance(u,t,true);
end;
procedure ins(m,d:prec);
begin
if m^.rnil then m^.r^.u:=d;
d^.r:=m^.r;
d^.l:=nil;
d^.u:=m;
m^.r:=d;
balance(d,t,true);
end;
procedure cutl(l:prec;var dl,dr:prec);
var
r,c:prec;
begin
r:=l;
dl:=nil;
if r^.lnil then
begin
dl:=r^.l;
dl^.u:=nil;
r^.l:=nil;
r^.kl:=0;
end;
while rnil do
begin
c:=r^.u;
if cnil then
begin
if c^.r=r then
begin
if c^.unil then
begin
if c^.u^.l=c then
begin
c^.u^.l:=r;
r^.u:=c^.u;
end
else
begin
c^.u^.r:=r;
r^.u:=c^.u;
end;
end else
begin
dr:=r;
r^.u:=nil;
end;
c^.r:=dl;
if dlnil then dl^.u:=c;
dl:=c;
dl^.u:=nil;
continue;
end;
end;
r:=r^.u;
end;
balance(l,dr,true);
end;
procedure cutr(r:prec;var dl,dr:prec);
var
l,c:prec;
begin
l:=r;
dr:=nil;
if l^.rnil then
begin
dr:=l^.r;
dr^.u:=nil;
l^.r:=nil;
end;
while lnil do
begin
c:=l^.u;
if cnil then
begin
if c^.l=l then
begin
if c^.unil then
begin
if c^.u^.l=c then
begin
c^.u^.l:=l;
l^.u:=c^.u;
end
else
begin
c^.u^.r:=l;
l^.u:=c^.u;
end;
end else
begin
dl:=l;
l^.u:=nil;
end;
c^.l:=dr;
if drnil then dr^.u:=c;
dr:=c;
dr^.u:=nil;
continue;
end;
end;
l:=l^.u;
end;
balance(r,dl,true);
end;
procedure add(p:prec);
var l,r,d:prec;
begin
getleft(t,n,l);
if lnil then
begin
getright(t,n,r);
if (n=r) or ((n^.x-r^.x)*(l^.y-r^.y)timew;
str((now-time)/kkk*24*60*60:0:6,strr);
TimeL.Caption:=strr+'s';
PaintBox1.Refresh;
end;
procedure TForm1.Button1Click(Sender: TObject);
begin
while snnil do
begin
tt:=sn^.n;
dispose(sn);
sn:=tt;
end;
while cnnil do
begin
tt:=cn^.n;
dispose(cn);
cn:=tt;
end;
halt;
end;
procedure TForm1.Button3Click(Sender: TObject);
var
i:integer;
t:pr;
begin
randomize();
while cnnil do
begin
t:=cn^.n;
dispose(cn);
cn:=t;
end;
while snnil do
begin
t:=sn^.n;
dispose(sn);
sn:=t;
end;
mx:=0;
my:=0;
new(t);
t^.n:=cn;
cn:=t;
t^.x:=0;
t^.y:=10;
if mx
Похожие работы

... процессов и явлений, использовать графику машины для повышения наглядности изучаемого материала. Использование пакетов прикладных учебных программ, готового программного обеспечения является одной из самых важных компонентов формирования компьютерной грамотности. При этом значительно расширяются межпредметные связи между многими учебными дисциплинами, особенно между математикой и информатикой. ...
... мальне значення показникунадійності, при якому приймається рішення про орєінтованийзвязок назвем порогом показника надійності і позначимо (). Для можливості порівняння результатів у різних парах змінних в одній задачі системного синтезу корисно ввести відносний показник надійності. Відносним показником надійності ηij приняття рішення про напрям звязку між змінними xj → xi (стрілка в ...
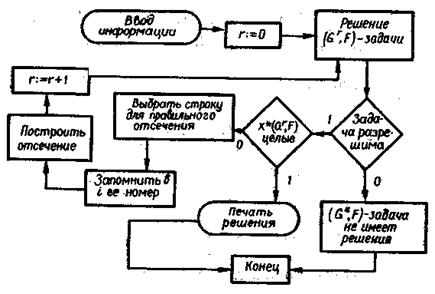
... принадлежит границе многогранника (многоугольника) условий, что было характерно для задач линейного программирования. 2. Теоретические основы методов отсечения Запишем общую задачу целочисленного программирования: в области, определенной условиями (11) (12) - целые, (13) максимизировать функцию (14) ...
... В: (2.3) Теперь будет сформулирована простая задача спектральной оценки. Особое внимание будет уделено моделированию свойств процесса сбора данных, которые являются общими для многих задач обработки решеток. Эти свойства включают измерение корреляционной функции при конечном числе неравномерно распределенных точек и ограничения на область пространства частоты-воктора волны, в ...
0 комментариев