Навигация
Температурный расчет с помощью вычислений информационной математики
23432
знака
1
таблица
15
изображений
Постановка задачи.
По длинной квадратного сечения трубе течет горячая жидкость. Труба наполовину погружена в ледяную ванну, так, что температура нижней половины поверхности трубы равна 00 С. Верхняя плоскость трубы имеет постоянную температуру 100 0 С. На участке между ледяной ванной и верхней плоскостью температура наружной поверхности трубы изменяется линейно по высоте от 0 0 С до 100 0 С. Жидкость внутри трубы имеет температуру 200 0 С.
Рис. 3.
Распределение
температуры
![]() в
теле трубы
удовлетворяет
уравнению
в
теле трубы
удовлетворяет
уравнению
С погрешностью не более 0,5 0 С вычислить распределение температуры в теле трубы.
| Дискретизация | Метод конечных разностей | + |
| задачи | Метод конечных элементов | |
| Решение | Метод Гаусса | |
| системы | Метод Зейделя | + |
| линейных | Метод последовательной верхней релаксации | |
| уравнений | Метод релаксация по строкам | |
| Вывод | Библиотечная графическая подпрограмма | |
| результатов | Алфавитно-цифровой, мозаичный | + |
Математическая формулировка задачи.
Решить диф.уравнение в частных производных:
с задаными началиными условиями на границах области дифференцирования.
При решении уравнения приблизительно заменю производные второго порядка конечно-разностными отношениями:
в результате чего диф.уравнение преобразуется в 5-ти диаганальную систему алгеброических уравнений n-го порядка.
Систему алгеброических уравнений буду решать методом Зейделя.
Погрешность решения задачи найду по формуле:
где,
![]() и
и ![]() -решения,полученные
для одной и той
же точки с разными
шагами.
-решения,полученные
для одной и той
же точки с разными
шагами.
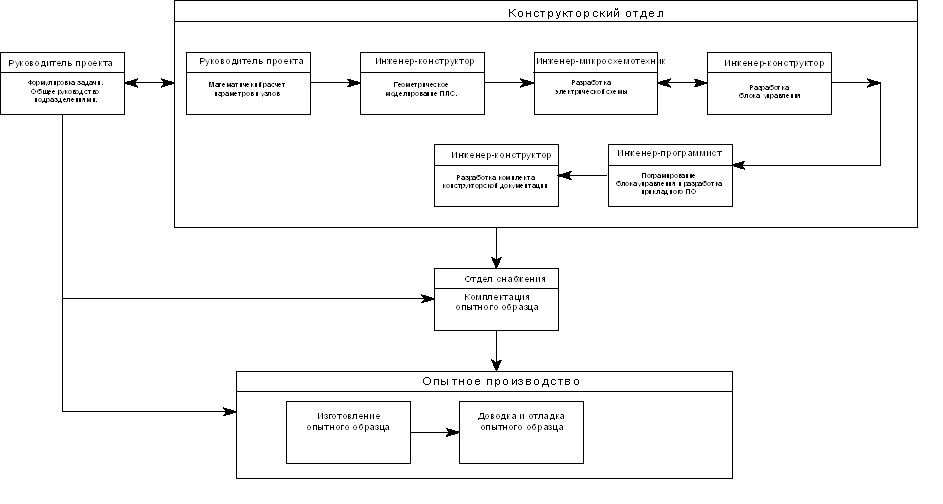
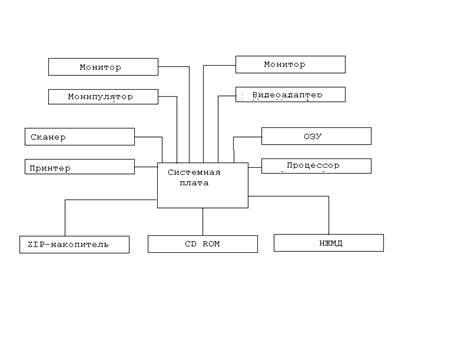
Функциональная
схема.
Метод конечных разностей.
Описание метода.
Так назван метод решения краевых задач, основанный на приближенной замене производных, входящих в дифференциальные уравнения и краевые условия, нонечно-разностными отношениями. Эта замена позволяет свести краевую задачу к задаче решения системы алгебраических уравнений.
Конечные разности и производные.Пусть некоторая функция y(x) задана на отрезке [a,b]. Будем считать, что она непрерывна и многократно дифференцируема на этом отрезке. Разделим отрезок на равные части длиною h и обозначим точки деления x0,x1,...,xi,...,xn.Значения функции в этих точках обозначим соответственно y0,y1,...,yi,...,yn.Первой центральной разностью в i-й точке (i=1,2,...,n-1) называют разность:
С помощью этой разности можно приближенно вычислить значение первой производной у` в i-й точке.
Разложим функцию y(x) в степенной ряд. приняв за центр разложения точку xi и ограничившись четырьмя членами:

где
![]()
Аналогично
найдем значение
ф-ции и в точке![]() ,отстоящей
от центра разложения
на шаг (-h):
,отстоящей
от центра разложения
на шаг (-h):

где
![]() .
.
Подставляя получим:
Таким образом,производная y` приближонно заменяется конечно-разностным отношением с ошибкой порядка h*h:
Второй центральной разностью ф-ции y(x) в i-й точке называют величину:
![]()
С помощью этой разности можно приближонно вычислить значение второй производной y`` в i-й точке.Используем теперь 5 членов разложения в ряд Тейлора:
Таким образом,вторая производная y`` с ошибкой порядка h*h может быть приближонно заменена конечно-разностным отношением:
При определении разностей в i -и точке использовались значения функции в точках, расположенных симметрично относительно xi . Поэтому эти разности называются центральными.
Существуют также левые и правые разности, использующие точки, расположенные соответственно левее и правее точки xi. С помощью этих разностей можно также приближенно вычислять значения производных, но погрешность при этом будет больше -порядка h.
Разностные системы уравнений составляются в следующем порядке.
1. Исходное дифференциальное уравнение преобразуют к такой форме, чтобы затем получить из него наиболее простую разностную систему уравнений. При этом учитывают, что коэффициенты при производных войдут в разностную схему одновременно в несколько ее членов и затем будут распространены на всю систему уравнений. Поэтому желательно иметь единичные коэффициенты при производных в исходном уравнении.
2. На интервале интегрирования исходного уравнения устанавливают равномерную сетку с шагом h и записывают разностную схему, приближенно заменяя производные соответствующими центральными конечно-разностными отношениями.
3.Применяя разностную схему для узлов сетки записывают разностные уравнения. При этом можно получить уравнения содержащие так называемые внеконтурные неизвестные, то есть неизвестные в точках, лежащих за пределами установленной сетки.
4.В разностной форме записывают краевые условия и составляют полную систему разностных уравнений.
Оценка погрешности решения краевой задачи
Решение разностной системы уравнений дает приближенное решение краевой задачи. Поэтому возникает вопрос о точности этого приближенного решения.
Для линейных краевых задач доказана теорема о том, что порядок точности решения краевой задачи не ниже порядка точности аппроксимации производных конечно-разностными отношениями. Оценку погрешности производят приемом Рунге. Краевую задачу решают дважды: с шагом сетки h и с шагом сетки H=kh, погрешность решения с малым шагом h оценивают по формуле:
где y(h) и y(H) - решения, полученные для одной и той же точки -xi отрезка интегрирования с разными шагами. Относительную погрешность E оценивают по формуле:
Если при составлении разностной системы уравнений используются левые или правые разности, то погрешность решения будет выше, порядка 0(h), и для ее оценки в формулах следует заменить k*k на k .
Применение метода конечных разностей для решения уравнений в частных проиэводных
Для применения разностного метода в области изменения независимых переменных вводят некоторую сетку. Все производные, входящие в уравнение и краевые условия, заменяют разностями значений функции в узлах сетки и получают таким образом алгебраическуго систему уравнений. Решая эту систему, находят приближенное решение задачи в узлах сетки.
Блок схема.
Подпрограмма МКР.
c------------------------------------------------------------------
c ПОДПРОГРАММА СОСТАВЛЕНИЯ СИСТЕМЫ УРАВНЕНИЙ
c МЕТОДОМ КОНЕЧНЫХ РАЗНОСТЕЙ
c
c real H-шаг по оси X
c real K-шаг по оси Y
c real N-количество уравнений(примерное число,желательно N=M*P)
c real y(6,N)-выходной массив уравнений,содержащий следующие поля:
c y(1,N)-номер точки по оси X
c y(2,N)-номер точки по оси Y
c y(3,N)-коэфициен уравнения для Q(y(1,N)-1,y(2,N))
c y(3,N)=h^2/(2*(h^2+k^2))
c y(4,N)-коэфициен уравнения для Q(y(1,N),y(2,N)-1)
c y(4,N)=k^2/(2*(h^2+k^2))
c y(5,N)-коэфициен уравнения для Q(y(1,N)+1,y(2,N))
c y(5,N)=h^2/(2*(h^2+k^2))
c y(6,N)-коэфициен уравнения для Q(y(1,N),y(2,N)+1)
c y(6,N)=k^2/(2*(h^2+k^2))
c integer M-число узлов по оси X
c integer P-число узлов по оси Y
c real Q(M,P)-массив значений Y
c integer N-выходное количество получившихся уравнений
c------------------------------------------------------------------
subroutine mkr(H,K,N,y,M,P,q)
integer M,P,IIX,IIY,NN,N,KR1,KR2,KR3
real y(6,N),H,K,q(M,P),HX,KY
c-----------------------------------------------------------------
c подсчитываю коэфициенты
c h^2/(2*(h^2+k^2))
c и
c k^2/(2*(h^2+k^2))
c-----------------------------------------------------------------
HX=H**2/(2*(H**2+K**2))
KY=K**2/(2*(H**2+K**2))
c-----------------------------------------------------------------
c составление уравнений
c и
c присваивание начальных значений
c
c nn-счетчик уровнений
c iix-номер текущего узла по оси X
c iiy-номер текущего узла по оси Y
c-----------------------------------------------------------------
NN=0
KR1=((P-1)/8)*3+1
KR2=((P-1)/8)*5+1
KR3=((M-1)/4)*3+1
do IIY=2,P-1
do IIX=2,M
if (NN.eq.N)then
print *,'ПЕРЕПОЛНЕНИЕ МАССИВА Y'
stop
endif
c-----------------------------------------------------------------
c проверка границы трубы с жидкостью
c-----------------------------------------------------------------
if ((IIY.ge.KR1).and.(IIY.le.KR2).and.(IIX.ge.KR3)) then
q(IIX,IIY)=200.
c-----------------------------------------------------------------
c проверка симметрии
c-----------------------------------------------------------------
elseif (((IIY.lt.KR1).or.(IIY.gt.KR2)).and.(IIX.eq.M)) then
q(IIX,IIY)=6
NN=NN+1
y(1,NN)=IIX
y(2,NN)=IIY
y(3,NN)=2*HX
y(4,NN)=KY
y(5,NN)=0
y(6,NN)=KY
c-----------------------------------------------------------------
c составление уравнений во внутренних точках фигуры
c-----------------------------------------------------------------
else
q(IIX,IIY)=5
NN=NN+1
y(1,NN)=IIX
y(2,NN)=IIY
y(3,NN)=HX
y(4,NN)=KY
y(5,NN)=HX
y(6,NN)=KY
endif
enddo
enddo
c-----------------------------------------------------------------
c присваивание начальных значений на границе фигуры
c------------------------------------------------------------------
KY=0
KR1=P/2+1
do IIY=1,P
if (IIY.le.KR1)then
q(1,IIY)=0
else
q(1,IIY)=500*KY-100
endif
KY=KY+K
enddo
do IIX=1,M
q(IIX,1)=0
q(IIX,P)=100
enddo
N=NN
end
ТЕСТ
Для тестирования составлю разностную систему с шагом вдоли оси X и Y=0.05
Неизвестные значения в узлах матрицы находящихся внутри фигуры высчитываются по формуле:

Неизвестные значения в узлах матрицы находящихся на оси симметрии высчитываются по формуле:

МЕТОД ЗЕЙДЕЛЯ.
Метод Зейделя относится к числу итерационных методов, в которых принципиально отсутствует фактор накопления погрешностей. Поэтому он широко применяется для решения больших систем уравнений. Будем рассматривать корни решаемой системы как компоненты некоторого вектора у . Основная идея всех итерационных методов заключается в том, что берется приближенное значение вектора у и по формулам, составленным на основании решаемых уравнений, вычисляется новое приближенное значение вектора у . Назовем эти приближенные значения y(k) и y(k+1) соответственно. Поскольку исходное приближение выбиралось произвольно, то у(k+1)в свою очередь может послужить исходным для получения по тем же формулам нового приближения y(k+2) . Очевидно, этот процесс можно продолжать сколь угодно долго. Говорят, что процесс итераций сходится, если получаемая при этом последовательность векторов у(k) (к=0,1,2,...} имеет своим пределом вектор y,являющийся точным решением системы:
На практике невозможно достигнуть этого предела, но можно приблизиться н нему с любой наперед заданной точностью. Так и поступают задаются некоторой погрешностью, вектором начального приближения и получают последовательные приближения до тех пор, пока действительная погрешность корней не станет меньше заданной.
Различные методы отличаются друг от друга способом вычисления очередного приближения, но во всех методах существуют две главные проблемы:
обеспечение сходимости процесса итераций;
оценка достигнутой погрешности.
Пусть дана линейная система
Предполагая, что диагональные коэффициенты
aii0 (i=1,2,..,n)
разрешим первое уравнение относительно y1 , второе - относительно y2 и т.д.
Тогда получим эквивалентную систему
где
 при ij
при ij
и
![]() при i=j (i,j=1,2,...,n)
при i=j (i,j=1,2,...,n)
Такую систему будем в дальнейшем называть приведенной.
Метод Зейделя заключается в следующем. Выбрав вектор начального приближения
y(ср)=(y1,y2,...,yn)
подставим его компоненты в правую часть первого уравнения системы и вычислим первую компоненту y`1 нового вектора y`(ср) . В правую часть второго уравнения подставим компоненты (y`1,y2,y3,...,yn) и вычислим вторую компоненту y`2'нового вектора. В третье уравнение подставим (y`1,y`2,y3,...,yn) и т.д. Очевидно,подстановкой в каждое уравнение мы, дойдя до последнего уравнения, обновим все компоненты исходного вектора и получим первое приближение к решению
y`(ср)=(y`1,y`2,y`3,...,y`n)
Далее , взяв в качестве исходного вектор у`(ср) , выполним вторую итерацию и получим y``(ср). Этот процесс будем продолжать до достижения заданной степени точности.
Оценка погрешности приближений процесса Зейделя
Для оценки погрешности прежде всего вычисляют показатель скорости сходимости
То есть для
каждой строки
матрицы коэффициентов
системы ![]() вычисляется
сумма модулей
коэффициентов,
лежащих правее
главной диагонали
вычисляется
сумма модулей
коэффициентов,
лежащих правее
главной диагонали ![]() :
:
и сумма модулей коэффициентов, лежащих левее главной диагонали:
Для каждой i-й строки (i =1,2,...,n ) вычисляется отношение
и в качестве ![]() берется
максимальное
из этих отношений.
Чем меньше
окажется
берется
максимальное
из этих отношений.
Чем меньше
окажется ![]() ,
тем большей
будет скорость
сходимости.
,
тем большей
будет скорость
сходимости.
Для процесса Зейделя справедлива следующая оценка погрешности К-го приближения:
 (i,j=1,2,...,n)
(i,j=1,2,...,n)
то есть модуль
отклонения
любого i -го корня
системы в К-м
приближении
от точного
значения того
же корня ![]() не больше, чем
умноженное
на множитель
не больше, чем
умноженное
на множитель ![]() максимальное
из приращений
корней, полученных
в результате
перехода от
(K-1)
-го приближения
к К-му.
максимальное
из приращений
корней, полученных
в результате
перехода от
(K-1)
-го приближения
к К-му.
Если задаться
абсолютной
погрешностью ![]() и
потребовать
выполнения
условия
и
потребовать
выполнения
условия
 (j=1,2,...,n)
(j=1,2,...,n)
то выполнится и условие
![]() (i=1,2,3,...,n),
(i=1,2,3,...,n),
то есть заданная
степень точности
на К-й итерации
будет достигнута.
На практике
это означает,
что после каждой
итерации необходимо
выделить тот
корень, изменение
которого по
сравнению с
предыдущим
значением
оказалось
наибольшим
по модулю. Модуль
приращения
этого корня
необходимо
умножить на
![]() и сравнить
результат с
выбранной
абсолютной
погрешностью
и сравнить
результат с
выбранной
абсолютной
погрешностью![]() .
.
Достаточные условия сходимости процесса Зейделя
Если модули коэффициентов системы удовлетворяют хотя бы одному из условий
 (i,j=1,2,3,...,n)
(i,j=1,2,3,...,n)
то процесс Зейделя для соответствующей приведенной системы сходится к её единственному решению при любом выборе начального вектсра y(ср) Такие системы называют системами с диагональным преобладанием.
Метод Зейдедя имеет свойство, позволяющее обеспечить сходимость процесса для любых систем уравнений с неособенной матрицей коэфициентов.
Если обе части систем с неособенной матрицей коэфициентов А=[aij] умножить слева на транспонировнную матриц A*[aij] , то будет получена новая, равносильная исходной система, которая называется нормальной. Процесс Зейделя для приведенной системы, полученной из нормальной, всегда сходится независимо от выбора нача льного приближения.
Блок схема.
Подпрограмма метода Зейделя.
c-----------------------------------------------------------------
cПОДПРОГРАММА РЕШЕНИЯ СИСТЕМЫ УРАВНЕНИЙ МЕТОДОМ ЗЕЙДЕЛЯ
c
с integer N-входное количество уравнений
c real y(6,N)-входной массив уравнений,содержащий следующие поля:
c y(1,N)-номер точки по оси X
c y(2,N)-номер точки по оси Y
c y(3,N)-коэфициен уравнения для Q(y(1,N)-1,y(2,N))
c y(3,N)=h^2/(2*(h^2+k^2))
c y(4,N)-коэфициен уравнения для Q(y(1,N),y(2,N)-1)
c y(4,N)=k^2/(2*(h^2+k^2))
c y(5,N)-коэфициен уравнения для Q(y(1,N)+1,y(2,N))
c y(5,N)=h^2/(2*(h^2+k^2))
c y(6,N)-коэфициен уравнения для Q(y(1,N),y(2,N)+1)
c y(6,N)=k^2/(2*(h^2+k^2))
c integer M-число узлов по оси X
c integer P-число узлов по оси Y
c real Q(M,P)-входной массив начальных значений Y
c real Q(M,P)-выходной массив вычисленых значений Y
c real E-погрешность вычислений
c------------------------------------------------------------------
subroutine zeidel(N,y,M,P,q,E)
integer N,M,P,I,S
real y(6,N),q(M,P),E,EI,NEXTQ
c------------------------------------------------------------------
c вычисление коэфициента сходимости процесса
c mj=y(5,1)+y(6,1)
c и выражения
c km=mj/(1-mj)
C НО Т.К. MJ=0.5 ТО KM=1 И СЛЕДОВАТЕЛЬНО ЕГО МОЖНО ОПУСТИТЬ
c-----------------------------------------------------------------
c KM=(y(5,1)+y(6,1))/(1-y(5,1)+y(6,1))
c------------------------------------------------------------------
c итерации
c S-счетчик итераций
c------------------------------------------------------------------
S=0
Похожие работы
... быть выведены на печать. На экране рисунки могут быть статическими (неподвижными) или динамическими (движущимися). В последнее время машинная графика выделилась в самостоятельный раздел информатики с многочисленными приложениями. Средствами машинной графики создается не только печатная продукция, но и рекламные ролики на телевидении, мультфильмы. Объясним, как кодируется изображение в памяти ...
... хранение больших массивов измерительной информации. Следствием этого является схожесть структур, обязательное использование ЭВМ и соответствующего ПМО. Заключение В работе рассмотрены примеры измерительных информационных систем для исследования объектов различной физической природы. Литература 1. Автоматизация физических исследований и эксперимента: компьютерные измерения и виртуальные ...
... ранее компьютерных технологий, применяемых на этапах разработки объекта машиностроительного профиля, приведена в Приложении А. Глава 2. Современные компьютерные технологии при проектировании высокомоментного линейного привода с цифровым программным управлением Привод линейный синхронный представляет собой комплектный привод прямого действия на базе однокоординатного синхронного линейного ...
... выданных книг, фиксацию возврата книг, просмотра и распечатки отчета задолжников, списание формуляров в архив. 3.5 Расчет вычислительных ресурсов, необходимых для функционирования автоматизированной информационной библиотечной системы АРМ администратора, каталогизатора и библиотекаря объединены (разделение нецелесообразно, так как новые поступления литературы и периодики невелики). Для ...
0 комментариев