Навигация
4. АЛГОРИТМЫ ТРАССИРОВКИ
Трассировка соединений является, как правило, заключительным этапом конструкторского проектирования РЭА и состоит в определении линий, соединяющих эквипотенциальные контакты элементов, и компонентов, составляющих проектируемое устройство.
Задача трассировки – одна из наиболее трудоемких в общей проблеме автоматизации проектирования РЭА. Это связано с несколькими факторами, в частности с многообразием способов конструктивно-технологической реализации соединений, для каждого из которых при алгоритмическом решении задачи применяются специфические критерии оптимизации и ограничения. С математической точки зрения трассировка – наисложнейшая задача выбора из огромного числа вариантов оптимального решения.
Одновременная оптимизации всех соединений при трассировке за счет перебора всех вариантов в настоящее время невозможна. Поэтому разрабатываются в основном локально оптимальные методы трассировки, когда трасса оптимальна лишь на данном шаге при наличии ранее проведенных соединений.
Основная задача трассировки формулируется следующим образом: по заданной схеме соединений проложить необходимые проводники на плоскости (плате, кристалле и т.д.), чтобы реализовать заданные технические соединения с учетом заранее заданных ограничений. Основными являются ограничения на ширину проводников и минимальные расстояния между ними.
Исходной информацией для решения задачи трассировки соединений обычно являются список цепей, параметры конструкции элементов и коммутационного поля, а также данные по размещению элементов. Критериями трассировки могут быть процент реализованных соединений, суммарная длина проводников, число пересечений проводников, число монтажных слоев, число межслойных переходов, равномерность распределения проводников, минимальная область трассировки и т.д. Часто эти критерии являются взаимоисключающими, поэтому оценка качества трассировки ведется по доминирующему критерию при выполнении ограничений по другим критериям либо применяют аддитивную или мультипликативную форму оценочной функции, например следующего вида
, где F – аддитивный критерий; λi – весовой коэффициент; fi – частный критерий; p – число частных критериев.
Известные алгоритмы трассировки печатных плат можно условно разбить на три большие группы:
1) Волновые алгоритмы, основанные на идеях Ли и разработанные Ю.Л. Зиманом и Г.Г. Рябовым. Данные алгоритмы получили широкое распространение в существующих САПР, поскольку они позволяют легко учитывать технологическую специфику печатного монтажа со своей совокупностью конструктивных ограничений, Эти алгоритмы всегда гарантируют построение трассы, если путь для нее существует;
2) Ортогональные алгоритмы, обладающие большим быстродействием, чем алгоритмы первой группы. Реализация их на ЭВМ требует в 75-100 раз меньше вычислений по сравнению с волновыми алгоритмами. Такие алгоритмы применяют при проектировании печатных плат со сквозными металлизированными отверстиями. Недостатки этой группы алгоритмов связаны с получением большого числа переходов со слоя на слой, отсутствием 100%-ой гарантии проведения трасс, большим числом параллельно идущих проводников;
3) Алгоритмы эвристического типа. Эти алгоритмы частично основаны на эвристическом приеме поиска пути в лабиринте. При этом каждое соединение проводится по кратчайшему пути, обходя встречающиеся на пути препятствия.
Волновой алгоритм Ли
Данный алгоритм является классическим примером использования методов динамического программирования для решения задач трассировки печатных соединений. Основные принципы построения трасс с помощью динамического алгоритма сводятся к следующему.
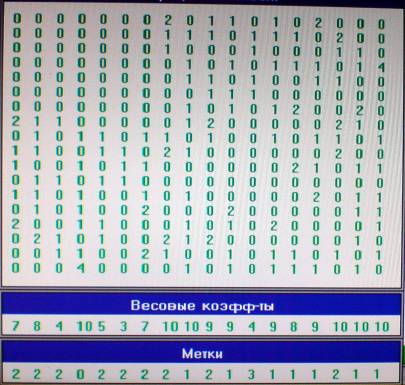
Все ячейки монтажного поля подразделяют на занятые и свободные. Занятыми считаются ячейки, в которых уже расположены проводники, построенные на предыдущих шагах, или находятся монтажные выводы элементов, а также ячейки, соответствующие границе платы и запрещенным для прокладывания проводников участкам. Каждый раз при проведении новой трассы можно использовать лишь свободные ячейки, число которых по мере проведения трасс сокращается.
На множестве свободных ячеек коммутационного поля моделируют волну влияния из одной ячейки в другую, соединяемых впоследствии общим проводником. Первую ячейку, зарождается волна влияний, называют источником, а вторую – преемником волны. Чтобы иметь возможность следить за прохождением фронта волны влияний, его фрагментам на каждом этапе присваивают некоторые веса:
,
где Pk и Pk-1 - веса ячеек k-го и (k-1)-го фронтов; - весовая функция, являющаяся показателем качества проведения пути, каждый параметр которой характеризует путь с точки зрения одного из критериев качества (длины пути, числа пересечений и т.п.). На Pk накладывают одно ограничение – веса ячеек предыдущих фронтов не должны быть больше весов ячеек последующих фронтов. Фронт распространяется только на соседние ячейки, которые имеют с ячейками предыдущего фронта либо общую сторону, либо хотя бы одну общую точку. Процесс распространения волны продолжается до тех пор, пока её расширяющийся фронт не достигнет приемника или на Θ-ом шаге не найдется ни одной свободной ячейки, которая могла бы быть включена в очередной фронт, что соответствует случаю невозможности проведения трассы при заданных ограничениях.
Если в результате распространения волна достигла приемника, то осуществляют «проведение пути», которое заключается в движении от приемника к источнику про пройденным на этапе распространения волны ячейкам, следя за тем, чтобы значения Pk монотонно убывали. В результате получают путь, соединяющий эти две точки. Из описания алгоритма следует, что все условия, необходимые для проведения пути, закладываются в правила приписания веса ячейкам.
Чтобы исключить неопределенность при проведении пути для случая, когда несколько ячеек имеют одинаковый минимальный вес, вводят понятие путевых координат, задающих предпочтительность проведения трассы. Каждое направление кодируют двоичным числом по mod q, где q – число просматриваемых соседних ячеек. При этом чем более предпочтительно то или иное направление, тем меньший числовой код оно имеет. Например, если задаться приоритетным порядком проведения пути сверху, справа, снизу и слева, то коды соответствующих путевых координат будут 00, 01, 10, и 11. Приписание путевых координат производят на этапе распространения волны. При проведении пути движение от ячейки к ячейке осуществляют по путевым координатам.
Существенными недостатками волнового алгоритма являются малое быстродействие и большой объем оперативной памяти ЭВМ, необходимый для хранения информации о текущем состоянии всех ячеек коммутационного поля, возможность построения лишь соединений типа «ввод-вывод». Попытки устранить указанные недостатки привели к созданию ряда модификаций волнового алгоритма.
Модификации алгоритма Ли
Метод встречной волны
В данном методе источниками волн являются обе ячейки, подлежащие электрическому объединению. При этом на каждом k-ом шаге поочередно строят соответствующие фронты первой и второй волн, распространяющихся из этих ячеек. Процесс продолжается до тех пор, пока какая-либо ячейка из фронта первой волны не попадет на фронт второй волны или наоборот. Проведение пути осуществляют из данной ячейки в направлении обоих источников по правилам, описанным в волновом алгоритме Ли.
Оценим число ячеек, просматриваемых на этапе распространения волны, при использовании в качестве источников одной или двух объединяемых точек. Пусть расстояние между этими точками R. Тогда для первого случая в момент достижения волной ячейки-приемника площадь просмотренной окрестности имеет величину (знак равенства соответствует отсутствию преград пути распространения волны). Для второго случая в момент встречи фронтов двух волн площадь просмотренной окрестности .
Таким образом, при использовании метода встречной волны просматриваемая площадь, а следовательно, и время, затрачиваемое на этапе распространения волны, уменьшаются примерно вдвое.
Недостатком метода является необходимость выделения дополнительного разряда памяти на каждую рабочую ячейку поля для хранения информации о принадлежности её к первой или второй волне. Однако выигрыш в повышении быстродействия выполняет указанный недостаток, поэтому данный метод используют во всех случаях, когда это позволяет объем оперативной памяти ЭВМ.
Лучевой алгоритм трассировки
В данном алгоритме, предложенным Л.Б. Абрайтисом, выбор ячеек для определения пути между соединяемыми точками A и B производят по заранее заданным направлениям, подобным лучам. Это позволяет сократить число просматриваемых алгоритмом ячеек, а следовательно, и время на анализ и кодировку их состояния, однако приводит к снижению вероятности нахождения пути сложной конфигурации, и усложняет учет конструктивных требований к технологии печатной платы.
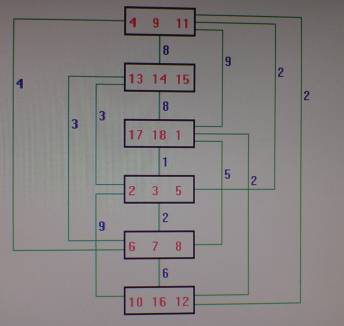
Работа алгоритма заключается в следующем. Задается число лучей, распространяемых из точек A и B, а также порядок присвоения путевых координат (обычно число лучей для каждой ячейки-источника принимается одинаковым). Лучи A(1), A(2),…, A(n) и B(1), B(2),…, B(n) считают одноименными, если они распространяются из одноименных источников A или B. Лучи A(i) и B(i) являются разноименными по отношению друг к другу. Распространение лучей производят одновременно из обоих источников до встречи двух разноименных лучей в некоторой ячейке C. Путь проводится из ячейки C и проходит через ячейки, по которым распространялись лучи.
При распространении луча может возникнуть ситуация, когда все соседние ячейки будут заняты. В этом случае считается заблокированным и его распространение прекращается.
Лучи:
A(1): вверх, влево
A(2): влево, вверх
B(1): вниз, вправо
B(2): вправо, вниз
На втором шаге луч B(1) оказывается заблокированным, а на четвертом шаге блокируется и луч A(2). Лучи A(1) и B(2) встречаются в ячейке C на восьмом шаге.
Обычно с помощью лучевого алгоритма удается построить до 70-80% трасс, остальные проводят, используя волновой алгоритм или вручную. Его применение особенно выгодно при проектировании плат с невысокой плотностью монтажа.
ИСПОЛЬЗУЕМАЯ ЛИТЕРАТУРА
Б.Н. Деньдобренко, А.С. Малика «Автоматизация конструирования РЭА»,Москва «Высшая школа» 1980.
В.М. Курейчик «Математическое обеспечение конструкторского и технологического проектирования с применением САПР»,Москва «Радио и связь» 1990.
К.К. Морзов, В.Г. Одиноков, В.М. Курейчик «Автоматизированное проектирование конструкций радиоэлектронной аппаратуры», Москва «Радио и связь» 1983. В.Н. Ильин, В.Т. Фролкин, А.И. Бутко и др.; «Автоматизация схемотехнического проектирования: Учебное пособие для вузов», Москва «Радио и связь» 1987.Похожие работы
... приводится в графической части. 3. ТРАССИРОВКА МОНТАЖНЫХ СОЕДИНЕНИЙ. 3.1 Трассировка с помощью алгоритма Прима На основании полученных ранее данных и требований задания проведем трассировку общего провода цепи питания печатной платы блока оперативной памяти методом Прима. Для этого приведём необходимый участок печатной платы в сетке с шагом 5. Вывод 1 разъёма должен быть соединён с выводами 7 ...


... на ней корпусами микросхемы (см Приложение 2). Выбирается произвольная точка, которая служит началом координат Рис. 11. Корпус микросхемы Рис. 12. Соответствие логических выводов микросхемы выводам корпуса 5. Согласно полученному эскизу печатной платы каждому выводу корпуса назначается своя координата относительно начала координат. Рис. 13 Матрица D до начала выполнения ...
... Рис.6 3. Трассировка цепей питания и земли Трассировка – прокладка электрических трасс (проводов при проводном монтаже и печатных соединений при печатном монтаже), соответствующих принципиальной электрической схеме. 3.1 Краткое описание алгоритма Краскала В алгоритме Краскала кратчайшую связывающую сеть (КСС) строят путем последовательного присоединения к ним ребер, удовлетворяющих ...
... УЛПМ-901. 11 Визуальный контроль качества сборки при увеличении 2,5. ГГ6366У/012. Маршрутная карта на техпроцесс изготовления печатной платы приведена в приложении. 8 ТЕХНИКО-ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ ДИПЛОМНОГО ПРОЕКТА 8.1 Характеристика изделия «Модуль управления временными параметрами». Обоснование объема производства и расчетного периода Модуль управления временными параметрами – ...
0 комментариев