Навигация
ОБЗОР АНАЛОГИЧНЫХ УСТРОЙСТВ
39407
знаков
3
таблицы
0
изображений
1. ОБЗОР АНАЛОГИЧНЫХ УСТРОЙСТВ
Фильтры – это частотно-избирательные устройства, которые пропускают или задерживают сигналы, лежащие в определенных полосах частот. До 60-х годов для реализации фильтров применялись, в основном, пассивные элементы, т. е. индуктивности, конденсаторы и резисторы. Основной проблемой при реализации таких фильтров оказывается размер катушек индуктивности (на низких частотах они становятся слишком громоздкими). С разработкой в 60-х годах интегральных ОУ появилось новое направление проектирования активных фильтров на базе ОУ. В активных фильтрах применяются резисторы, конденсаторы и усилители (активные компоненты), но в них нет катушек индуктивности. В дальнейшем активные фильтры почти полностью заменили пассивные. Сейчас пассивные фильтры применяются только на высоких частотах (выше 1МГц), за пределами частотного диапазона большинства ОУ широкого применения.
Сейчас во многих случаях аналоговые фильтры заменяются цифровыми. Работа цифровых фильтров обеспечивается, в основном программными средствами, поэтому они оказываются значительно более гибкими в применении по сравнению с аналоговыми. С помощью цифровых фильтров можно реализовать такие передаточные функции, которые очень трудно получить обычными методами. Тем не менее, цифровые фильтры пока не могут заменить аналоговые во всех ситуациях, поэтому сохраняется потребность в наиболее популярных аналоговых фильтрах – активных RC –фильтрах.
Фильтры можно классифицировать по их частотным характеристикам. На рисунке 1.2 изображены характеристики фильтра нижних частот (а), фильтра верхних частот (б), полосового фильтра (в). Основная функция любого фильтра заключается в том, чтобы ослабить сигналы, лежащие в определенных полосах частот, внести в них различные фазовые сдвиги или ввести временную задержку между входным и выходным сигналами.
С помощью активных RC – фильтров нельзя получить идеальные формы частотных характеристик в виде прямоугольников со строго постоянным коэффициентом передачи в полосе пропускания, бесконечным ослаблением в полосе подавления и бесконечной крутизной спада при переходе от полосы пропускания к полосе подавления. Проектирование активного фильтра всегда представляет собой поиск компромисса между идеальной формой характеристики и сложностью её реализации. Это называется «проблемой аппроксимации». Во многих случаях требования к качеству фильтрации позволяют обойтись простейшими фильтрами первого или второго порядка. Набор таких схем приведен ниже. Проектирование фильтра в этом случаи сводится к выбору схемы с наиболее подходящей конфигурацией и последующему расчету значений номиналов элементов для конкретных частот.
Рисунок 1.2 – Типовые характеристики фильтров.
Однако бывают ситуации, когда требование к фильтрации сигнала могут оказаться гораздо более жесткими, и могут потребоваться схемы фильтра с характеристиками более высоких порядков, чем первых или второй. Проектирование фильтра высоких порядков является более сложной задачей.
Анализ состояния и тенденций развития теории и практики цифровой фильтрации показывает, что основными используемыми методами являются частотная селекция сигналов и оптимальная (адаптивная) фильтрация.
Классификация цифровых фильтров (ЦФ) была предложена в докладе Д.А. Губанова и В.Б. Сташенко В ее основу положен функциональный признак (т. е. используемые алгоритмы цифровой фильтрации, а не схемотехнические решения), согласно которому ЦФ подразделяются на 4 группы: фильтры частотной селекции, оптимальные (квазиоптимальные), адаптивные и эвристические.
Рисунок 1.3 – Классификация цифровых фильтров
Наиболее изученными и опробованными на практике являются ЦФ частотной селекции. Они почти всегда представляют собой реализованные на новой элементной базе традиционные аналоговые фильтры частотной селекции. Выступления участников конференции показали, что развитие цифровых средств частотной селекции происходит в следующих направлениях:
создание пакетов прикладных программ для структурного синтеза, анализа качества фильтрации, обеспечения схемотехнической реализации и тестирования устройств; совершенствование существующих методов оптимального проектирования многоступенчатых структур с целью их полной формализации и включения в состав ПО; разработка новых подходов к проектированию ЦФ частотной селекции с улучшенными качественными показателями.Новейшие технические реализации как традиционных, так и нетрадиционных задач цифровой обработки сигналов чаще всего используют разные схемотехнические решения. Наибольшее внимание участников секции цифровой фильтрации привлекли алгоритмы многоскоростной обработки сложных сигналов, которые содержат как быстро, так и медленно меняющиеся составляющие. Такой алгоритм должен предусматривать предварительное разделение «быстрых» и «медленных» компонентов с понижением частоты дискретизации «медленных» составляющих и последующей их обработкой. Современные вычислительные средства позволяют решать в режиме реального времени и задачи многомерной фильтрации, существенно более сложные, чем цифровая фильтрация одномерных сигналов, выполняемая с помощью сигнальных процессоров или многопроцессорных систем.
Похожие работы

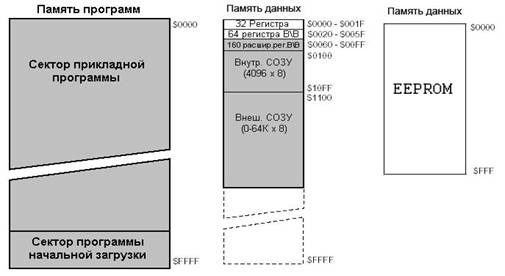
... 8-канальный АЦП и аналоговый компаратор; - последовательные интерфейсы UART0, UART0, TWI и SPI; - блоки прерывания и управления (включая сторожевой таймер). Архитектура ядра. Ядро микроконтроллера выполнено по усовершенствованной RISC-архитектуре. Арифметико-логическое устройство, выполняющее все вычисления, подключено непосредственно к 32 регистрам общего назначения. Благодаря этому АЛУ ...

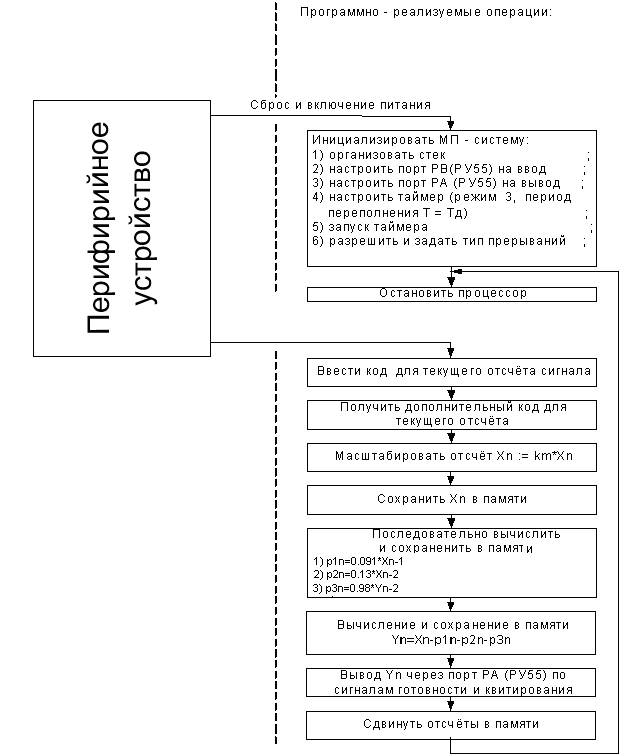
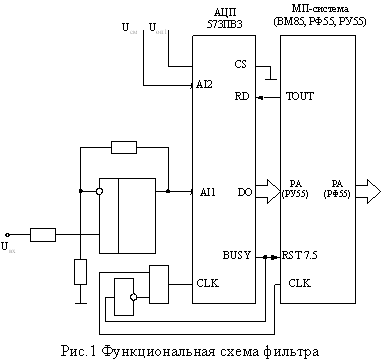
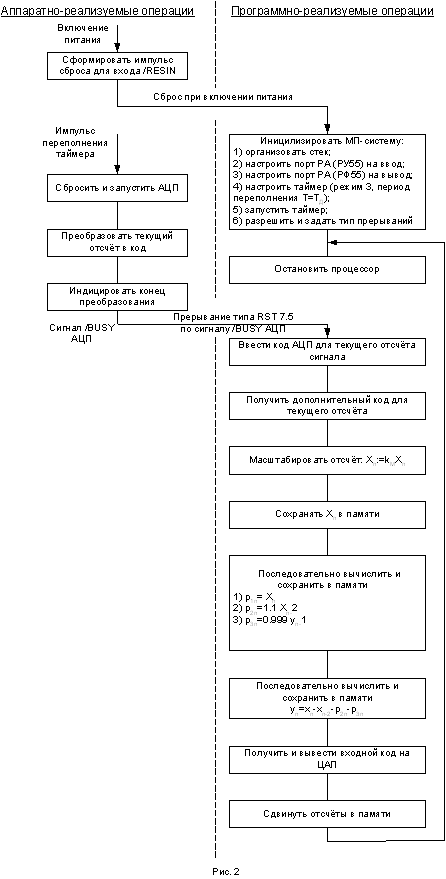
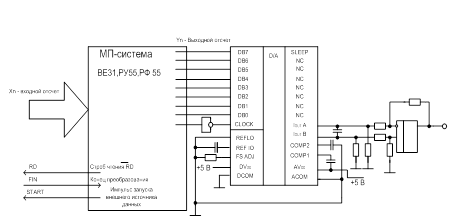
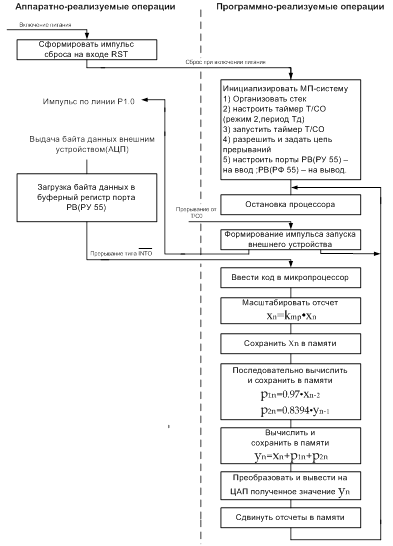
... данных в режиме простого обмена данными; q таймер (РУ55) останавливается; q содержимое ячеек ОЗУ и буферных регистров портов (РУ55) сохраняется. 3. Разработка общего алгоритма функционирования фильтра Общий алгоритм функционирования фильтра строится на основе выводов и определений, сделанных при анализе задачи, и включает в себя все функции устройства, реализуемые аппаратно и реализуемые ...
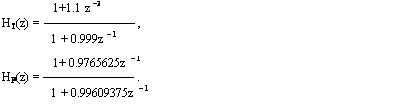
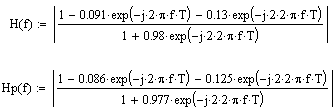
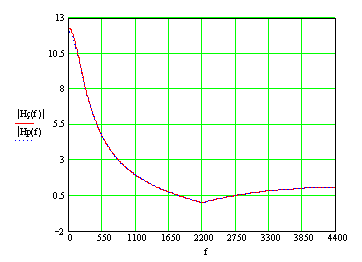
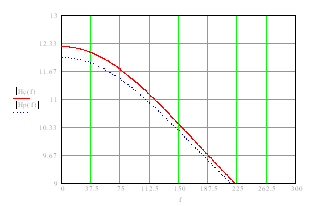
... , b2i , a2i определяют характеристики фильтра. При значениях коэффициентов фильтр имеет АЧХ фильтра верхних частот b 20 = 1;b 21 = 0;b 22 = 1.1; a 21 = 0.999;a 22 = 0.000 Разностное уравнение задает во временной области порядок получения выходной последовательности отсчетов из входной. В z-плоскости свойства цифрового фильтра описывает передаточная функция H(z), которая при двухкаскадной ...
... ; MOV X1, X ; MOV Y1, Y ; RETI ;возврат из подпрограммы обслуживания прерывания по входу END Исходные определения и ручной расчёт результатов работы программы: "Цифровой фильтр (нижних частот)". Разностное уравнение имеет вид: Представим уравнение в виде: , где , 1)Реализуемый коэффициент масштабирования (число без знака) при 8-разрядном формате беззнаковых коэффициентов: ;, ...
0 комментариев