Постановка задачи
Опыт эксплуатации ПКП показывает, что система стабилизации ПКП является неотъемлемой частью ТС
Элементы системы и принципы их функционирования
Алгоритм функционирования системы
Затраты на этапе разработки
Материальные затраты
Общие затраты на этапе разработки
Затраты на содержание оборудования
Общие затраты на 1 год производства
Безопасность жизнедеятельности
Постановка задачи
Навигация
Постановка задачи
Система автоматической стабилизации пневмоколесной платформы для транспортировки крупногабаритных грузов
105355
знаков
15
таблиц
0
изображений
2.1. Постановка задачи
Требуется разработать систему автоматической стабилизации пневмоколесной платформы для перевозки крупногабаритных грузов. Система должна обеспечивать горизонтальное положение платформы на заданной высоте с достаточной точностью как в движении, так и при проведении погрузочно-разгрузочных работ. Управление системой - микропроцессорное.
2.2. Требования
к процессу стабилизации ПКП в горизонтальном положении
С точки зрения протекания процесса управления, требования к системе автоматической стабилизации формируются по трем основным направлениям:
- точность;
- устойчивость;
- качество переходного процесса.
Точность системы задается и определяется в установившихся режимах. Устойчивость гарантирует затухание переходного процесса, после чего обеспечивается желаемое качество затухающего переходного процесса.
На движущуюся платформу действует только одно возмущение - дорожная поверхность. Она же определяет отклонение платформы от горизонтального положения. Возврат платформы в исходное положение подвеска, даже с упругим элементом, обеспечить не может. Поэтому устойчивость горизонтального положения должна достигаться при синтезировании закона управления. Вид закона управления определяется внутренними связями объекта управления и не зависит от каких-либо других условий.
Качество переходного процесса стабилизации пневмоколесной платформы целиком определяется уровнем дорожных возмущений и требуемой точностью стабилизации.
Таким образом, исходным требованием к процессу стабилизации платформы в горизонтальном положении, является точность стабилизации платформы. Поэтому представляется интересным и важным указать зависимости между точностью стабилизации платформы и требованиями эксплуатации транспортных средств такого класса, а также связать точность стабилизации с параметрами самого транспортного средства.
Среди преимуществ, которые дает управление гидробалансирными подвесками, основными являются три:
- обеспечение устойчивости платформы по опрокидыванию;
- подъем и опускание платформы при проведении погрузочно-разгрузочных работ;
- расширение диапазона преодолеваемых дорожных неровностей.
Очевидно, что обеспечение устойчивости платформы - единственное из перечисленных условие, которое накладывает ограничения на уровень стабилизации платформы.
Есть еще одно условие, которое накладывает ограничение на уровень стабилизации платформы. На него прямо нигде не указывается, но наличие его всегда подразумевается.
Появление гидравлических балансирных подвесок на пневмоколесных платформах не случайно. Нагрузки на опоры столь велики, что ни одна другая подвеска надежно работать не будет. Появление гидробалансиров связано с необходимостью более равномерно распределять нагрузки как на дорогу, так и на саму платформу. Минимально возможное число гидробалансиров - три. Поэтому равномерно распределить нагрузку между ними можно лишь управляя положением пневмоколесной платформы. Горизонтальность при этом возникает из симметрии такого положения и невысоких скоростей движения ПКП.
Таким образом, точность стабилизации ПКП необходимо выбирать исходя из условий устойчивости платформы по опрокидыванию и заданного уровня перегрузок по гидравлическим опорам.
Будем понимать под точностью стабилизации допустимые углы наклона платформы, при которых она еще не теряет некоторых своих свойств. Отнесем к таким свойствам устойчивость пневмоколесной платформы против опрокидывания при движении, а более высокий уровень стабилизации может быть определен в терминах перегрузок на опоры пневмоколесной платформы, так как горизонтальная стабилизация - это одновременно уменьшение опрокидывающих моментов силы тяжести.
Под устойчивостью будем понимать неопрокидываемость пневмоколесной платформы.
Следует отметить, что углы продольного и поперечного крена зависят как друг от друга, так и от изначального положения центра тяжести системы ПКП + груз.
На основании полученных требований на точность стабилизации платформы были рассчитаны величины этих требований для проектируемой пневмоколесной платформы, основные параметры которой приведены в приложении.
Табл. 2.1. Требуемая точность стабилизации пневмоколесной платформы.
| Перегрузки | g3 = 6 м | g3 = 4 м | ||
| a*, град | j*, град | a*, град | j*, град | |
| 50% | 3,1 | 7,6 | 4,7 | 11,5 |
| 40% | 2,6 | 6,3 | 3,8 | 9,4 |
| 30% | 1,8 | 4,4 | 2,7 | 6,7 |
| 20% | 1,3 | 3,0 | 1,9 | 4,6 |
| 10% | 0,9 | 1,8 | 1,1 | 2,5 |
В данной таблице приняты следующие условные обозначения:
g3 - высота центра тяжести груза;
a* и j* - точность стабилизации соответствующих угловых колебаний.
Данные в таблице показывают, что при транспортировке крупногабаритных грузов не рационально стабилизировать платформу с точностью, превышающей 1°.
Итак, здесь можно сделать следующие выводы:
1. Основным критерием при проектировании системы автоматической стабилизации пневмоколесной платформы является точность стабилизации. Точность стабилизации определяется устойчивостью платформы по опрокидыванию, и допустимым уровнем перегрузок опор.
2. Расчет точности стабилизации проектируемой пневмоколесной платформы позволяет для дальнейших исследований принять, что стабилизировать пневмоколесную платформу достаточно с точностью 1°.
2.3. Анализ существующих методов и средств стабилизации
большегрузных пневмоколесных платформ
Автомобильные перевозки тяжелых и сверхтяжелых негабаритных грузов характеризуются большой сложностью в отношении как их организации, так и технического обеспечения особыми транспортными средствами. Преимущественное распространение в этих перевозках получили автомобильные поезда специализированного производства, обеспечивающие буксирование прицепов общей массой в несколько сотен тонн. Удовлетворить возрастающие требования к таким автопоездам, учитывая их недостатки, все труднее. Этим, видимо, можно объяснить появление нового типа транспортных средств для перевозки сверхтяжелых грузов - многоопорных пневмоколесных платформ (ПКП). Общий вид ПКП представлен на рисунке 2.1.
Рис. 2.1. Общий вид ПКП
Возможное число опор ПКП ограничено стандартами, которые заставляют увеличивать нагрузку на опору вплоть до максимальной по несущей способности дороги. В этом случае в качестве подвески приходится использовать гидравлические цилиндры. Известно, что при движении в несвязанных опорах возникает существенный разброс по нагрузкам. Стремление уменьшить разброс нагрузок по опорам (и, следовательно, по дороге) привел к организации балансирных гидравлических связей между гидроцилиндрами опор, делая их как можно обширнее. Поэтому все транспортные средства имеют три или четыре (не более) гидробалансира. Главное назначение балансирных гидравлических связей подвесок в группах и групп по трех- или четырехточечной опорной схеме - обеспечение равномерного распределения вертикальных нагрузок по опорам. При трехточечной структуре подвески (три гидравлических группы) ПКП может двигаться по наиболее неровной дороге благодаря отсутствию изгибных деформаций. При четырехточечной опорной схеме (четыре гидравлических группы) обеспечивается устойчивость, которой обладает обычный двухосный автомобиль нормальной компоновки.
Рассмотрим известные электронные системы стабилизации ПКП. Среди них можно выделить две различные по назначению системы: равномерного подъема и опускания платформы для проведения бескрановых погрузочно-разгрузочных работ и систему стабилизации ПКП, которая обеспечивает горизонтальное положение платформы при движении по дороге.
Наиболее широко используется электронные системы для обеспечения погрузочно-разгрузочных работ. Основным их достоинством является отсутствие необходимости делать поправки на утечки рабочей жидкости.
Система электронного регулирования подъема платформы фирмы Камаг представлена на рисунке 2.2. она рассчитана на транспортные средства с четырьмя гидробалансирами. В каждый гидробалансир включены гидроцилиндры трех опор и специальный гидроцилиндр, который одной полостью соединен с гидрогруппой, а другой полостью через гидравлический распределитель - с гидронасосом. Камера каждого специального гидроцилиндра рассчитана на полный объем гидроцилиндра опор гидробалансирной группы.
Электронная система включает в себя четыре датчика высоты платформы, четыре гидрораспределителя, управляющее электронное устройство и переключатель.
Рис. 2.2. Электронная система автоматического подъема и опускания ПКП фирмы Камаг
Датчики высоты представляют по существу датчики углов потенциометрического типа, которые устанавливаются на одну из опор в группе на рычаг подвески. Угол складывания рычага пропорционален вертикальному положению грузонесущей платформы и, таким образом, потенциометрические датчики углов дают высоту платформы около соответствующей опоры. Переключатель, установленный в кабине водителя, приводит систему в рабочее состояние и отключает ее. Кроме указанных приборов система включает четыре показывающих прибора, отражающих измеренное фактическое значение высоты платформы в четырех точках, также установленных в кабине водителя. Они служат для визуального контроля за подъемом или опусканием платформы. Предусмотрено управление положением платформы в ручном режиме.
При установке переключателя в рабочее положение электронное устройство снимает данные с потенциометрических датчиков углов, сравнивает их между собой и с некоторым заданным значением и выдает сигнал управления на гидрораспределители. Гидрораспределители подают в каждый специальный цилиндр объем рабочий жидкости, пропорциональный входному напряжению, и через них подают масло в гидробалансирные группы.
Недостатками рассмотренной системы управления является невозможность выдержать горизонтальность платформы на негоризонтальной поверхности и несовместимость ее с системой стабилизации ПКП в движении. Однако довольно часто при использовании ПКП в заводских условиях равномерность подъема платформы достаточна для применения такой системы.
Другой основной способ управления подвесками многоопорной ПКП заключается в стабилизации платформы ПКП в горизонтальном положении (горизонтирование). Для примера опишем его использование в автоматизированной системе горизонтирования фирмы "Шаурле", где управление осуществляется под непосредственным контролем оператора. Подобными системами оснащены все многоопорные ПКП.
Функциональная схема гидравлической системы подрессоривания и управляющих ею аппаратов приведена на рисунке 2.3. Система горизонтирования приводится в действие насосным агрегатом, который состоит из двигателя внутреннего сгорания, гидронасоса высокого давления, масляного фильтра, предохранительного клапана и манометра, и через блок трехпозиционных гидрораспределителей связана с гидроцилиндрами опор.
На пульте управления в блоке гидрораспределителей установлены четыре рукоятки управления подъемом и опусканием идеальной точки ("гидравлической точки"), отражающей центр силового воздействия группы.
Рис. 2.3. Система горизонтирования фирмы Шаурле
1 - масляный бак; 2 - блок гидрораспределителей с механическим управлением; 3 - масляный фильтр; 4 - насос; 5 - манометр; 6 - ДВС; 7 - управление поворотом ПКП.
Каждая рукоятка управляется одним из четырех возможных гидравлических контуров и в зависимости от положения рукоятки может осуществлять подъем или опускание гидравлической точки. Клапаны гидрораспределителей работают бесступенчато, то есть расход масла через них пропорционален углу поворота рукоятки управления и не зависит от давления и вязкости жидкости. Действуя одновременно всеми четырьмя рукоятками (при трехточечном опирании - тремя), можно обеспечить подъем платформы без существенного перекоса. Если одна из гидравлических точек выдвигается быстрее других, то можно соответственно уменьшить угол поворота нужной рукоятки и корректировать таким образом работу любой гидравлической точки. Опускание и горизонтирование происходят аналогично. При этом для нормальной работы на систему управления наложено жесткое условие - центр тяжести груза должен находиться в геометрическом центре платформы ПКП.
Автоматическое горизонтирующее устройство использует фирма "Трабоза" (рис. 2.4.). Применение его позволяет исключить нарушение горизонтальности платформы при движении по дороге с поперечным уклоном.
Устройство включает в себя гидравлический уравнительный цилиндр двойного действия, корпус которого связан с гайкой ходового винта, причем привод последнего осуществляется гидромотором, системой клапанов, а также датчиком положения платформы. При нарушении горизонтального положения платформы в поперечном направлении срабатывает датчик положения, при этом начинается вращение гидромотора и ходового винта в направлении, при котором перемещение корпуса гидроуравнительного цилиндра обеспечивает подачу дополнительного количества рабочей жидкости в тот бортовой контур, в сторону которого произошло опускание платформы. При этом одновременно забирается равное количество рабочей жидкости из противоположного бортового контура. Это продолжается до тех пор, пока платформа вновь не займет горизонтальное положение.
Применение автоматического горизонтирующего устройства позволяет:
- наиболее быстро произвести подъем одного борта ПКП при одновременном_опускании_другого;
- снизить величину мощности, необходимой для горизонтирования;
- сохранить неизменной первоначально установленную высоту и горизонтальность платформы при различных условиях эксплуатации.
Рис. 2.4. Автоматическое горизонтирующее устройство фирмы Трабоса
1 - насос; 2 - датчик положения; 3 - гидрораспределитель; 4 - гидродвигатель; 5 - ходовой винт; 6 - гидравлический уравнительный цилиндр.
При продольном уклоне, при перераспределении нагрузок, вызываемом силами инерции и центробежными силами необходимо вводить поправки на максимальную величину перевозимого груза.
Еще одной отличительной особенностью ПКП фирмы "Трабоза" является наличие специальной электронной контролирующей системы подвесок, одна из функций которой - расчет веса транспортируемого груза и положения проекции центра тяжести на плоскость несущей платформы. Эта информация затем выводится на дисплей в кабине водителя.
Приведенные системы управления подвесками многоопорных ПКП не обеспечивают полностью равномерного распределения нагрузок по гидравлическим группам в автоматическом режиме. Поэтому они требуют дополнительного внимания со стороны водителя - оператора и ограничены его возможностями. Чем сложнее груз, больше его масса, тем труднее оператору стабилизировать платформу в горизонтальном положении, особенно при движении по дороге. Важным недостатком приведенных систем управления является сложность их интегрирования на одном транспортном средстве, сформированном из нескольких модулей ПКП.
Применение микропроцессорных систем для управления подвесками позволяет обеспечить стабилизацию платформы большегрузного автотранспортного средства с высокой точностью (до 0,1°). Однако подробных сведений о таких зарубежных системах нет, хотя потребность в них увеличивается, особенно в связи с созданием многомодульных автотранспортных средств.
Среди известных систем стабилизации подрессоренных масс других транспортных средств выделим две: систему управления подвесками многоосного транспортного средства, как наиболее близкую по конструкции транспортного средства, и устройство для поддержания горизонтального положения кузова автомобиля, как наиболее близкую по характеру решаемых задач.
Система управления активными подвесками многоосного автотранспортного средства (рис. 2.5.) включает в себя датчики 1 и 3 продольного a и поперечного j крена маятникового типа, датчик 2 изменения DG статического веса подрессоренного корпуса автотранспортного средства тензометрического типа, датчик 4 скорости V движения автотранспортного средства тахеометрического типа, измеряющий скорость по числу оборотов вращающихся деталей двигателя или силовой передачи, датчик 5 угла W поворота рулевого колеса потенциометрического типа.
Рис. 2.5. Электронная система управления активными подвесками многоосного автомобиля
Выходы датчиков 1-5 через низкочастотные фильтры 6 соединены с входами блока 7 аналого-цифровых преобразователей.
Для получения сигналов, пропорциональных продольным ускорениям транспортного средства и угловой скорости вращения рулевого колеса, система снабжена дифференцирующими звеньями 8 и 9, входы которых через низкочастотные фильтры соединены с выходами датчиков скорости ТС и угла поворота рулевого колеса, а выходы - с блоком 7 АЦП. Каждый из АЦП в блоке 7 совместно с низкочастотными фильтрами 6 и датчиками 1-5, а также дифференцирующими звеньями 8 и 9, образуют каналы измерения перечисленных величин.
В блоке 7 непрерывные сигналы датчиков 1-5 и сигналы, поступающие с выхода дифференцирующих звеньев 8 и 9, преобразуются в дискретный цифровой код, что повышает точность системы и ее быстродействие.
Выходы АЦП соединены соответственно с блоками 10 и 11 определения продольной и поперечной устойчивости. Эти блоки предназначены для вычисления составляющих усилий, действующих на подрессоренный корпус АТС в функции изменения измеряемых параметров по определенным зависимостям, заложенным в их память, и для последующего суммирования величин указанных составляющих усилий. Кроме того, эти блоки предназначены для формирования управляющих сигналов в системе управления при превышении измеряемыми параметрами заданных допустимых значений. Для этого оно снабжены соответствующими логическими устройствами или встроенными в память таблицами ситуаций. Так достигается продольная и поперечная устойчивость АТС.
При движении АТС по неровной дороге в случаях, когда измеряемые датчиками 1-5 параметры не превышают заданных допустимых значений, записанных в память блоков 10 и 11, последние выдают управляющие сигналы, пропорциональные рассчитанным поверхностным силам. Эти управляющие сигналы поступают в блоки 14-22, где сравниваются с сигналами реальных поверхностных сил, поступающими из датчиков 28. Поэтому на выходе из блоков сравнения сил формируются управляющие сигналы Uiл и Uiп, пропорциональные лишь динамической нагрузке, зависящей только от микропрофиля дороги, и поступающие затем в силовой привод активных подвесок. Этим обеспечивается плавность хода АТС.
По функциональному составу описанная система управления способна выполнить практически любую задачу управления подрессоренной массы, так как обеспечивает получение всей информации о положении кузова. Однако заложенный в нее алгоритм не позволяет стабилизировать кузов в горизонтальном положении. Кроме того, вполне вероятно, что система управления подвесками многоосного автомобиля будет избыточна при переложении ее на ПКП и при изменении целей ее работы.
Устройство для поддержания горизонтального положения кузова автомобиля имеет функциональную схему, которая представлена на рис. 2.6.
Рис. 2.6. Устройство для поддержания горизонтального положения кузова.
1, 2, 3, 4 - датчики уровня кузова автомобиля; 5 - датчик поперечного крена; 6 - датчик продольного крена; 7 - датчик углов поворота рулевых колес; 8 - датчик скорости автомобиля; 9 - задатчик уровня кузова; 10 - компьютер; 11, 12, 13, 14 - исполнительные органы горизонтирующего механизма
Автомобиль оборудован центральным вычислительным устройством 10, которое по заданной программе обрабатывает сигналы с датчиков 1-4 уровня кузова автомобиля, датчика 5 поперечного наклона, датчика 6 продольного наклона, датчика 7 угла поворота рулевого колеса, датчика 8 скорости автомобиля, задающего устройства 9, устанавливающего желаемый уровень кузова автомобиля, и определяет, необходимо или нет управление положением кузова. Если необходимо, то по предписанной программе центральное вычислительное устройство выдает управляющие сигналы на исполнительные органы 14-17 горизонтирующего устройства в соответствии с входными сигналами от датчиков 1-9.
Основными недостатками этого устройства являются измерение хода подвесок и эвристический, а поэтому достаточно сложный алгоритм управления.
Таким образом, ни одна из систем стабилизации подрессоренных масс автотранспортных средств, включая и ПКП, не способна обеспечить стабилизацию ПКП в горизонтальном положении при движении по дороге и при проведении бескрановых погрузочно-разгрузочных работ. Необходимо разрабатывать новую систему.
Анализ технологических функций, выполняемых грузонесущей платформой большегрузного автотранспортного средства, показал, что система автоматической стабилизации пневмоколесной платформы должна выполнять три операции: сохранять горизонтальное положение платформы в движении, горизонтировать платформу при погрузочно-разгрузочных операциях и контролировать загрузку платформы. Последняя операция не относится к управлению платформой и поэтому рассматриваться не будет.
Из физических соображений ясно, что для стабилизации платформы в горизонтальном положении достаточно управлять подачей рабочей жидкости в две гидравлические группы, например в группы 1 и 2. Тогда ограничений на подачу жидкости в третью группу нет. Система автоматической поперечной стабилизации пневмоколесной платформы фирмы Шаурле обеспечивает уменьшение затрат мощности за счет одновременной подачи жидкости в одну группу и слива рабочей жидкости из другой. Давление нагнетания в гидросистеме подвесок ПКП поддерживается постоянным.
Отметим, что понятие стабилизации клиренса вполне совпадает с основным принципом, по которому осуществляет управление оператор: "на сколько поднял один борт, на столько же опустил другой". Этот же принцип по существу лежит в основе работы системы автоматической стабилизации в поперечном направлении пневмоколесной платформы фирмы Шаурле, крутосклонных тракторов и сельскохозяйственной техники, в основе стабилизации колесных машин. Но во всех этих системах стабилизации он решался конструктивно, поскольку рассматривалась стабилизация только одной угловой координаты, и поэтому в законах управления не фигурировал.
При отсутствии ограничений в гидроприводе системы подрессоривания неровность, которую пневмоколесная платформа может преодолеть без потери платформой горизонтального положения, будет максимальна, если объем рабочей жидкости в гидрогруппах при преодолении этой неровности будет минимален.
Рассмотренные системы стабилизации ПКП и подрессоренной массы автомобиля, а также общие принципы создания систем управления, показывают, что основой для разработки системы стабилизации ПКП является алгоритм управления системой подвесок ПКП. После получения алгоритма появляется возможность определить функциональную и структурную схемы системы управления и осуществить выбор технических устройств, реализующих систему стабилизации.
Исходя из вышеизложенного можно сделать следующие выводы:
Похожие работы
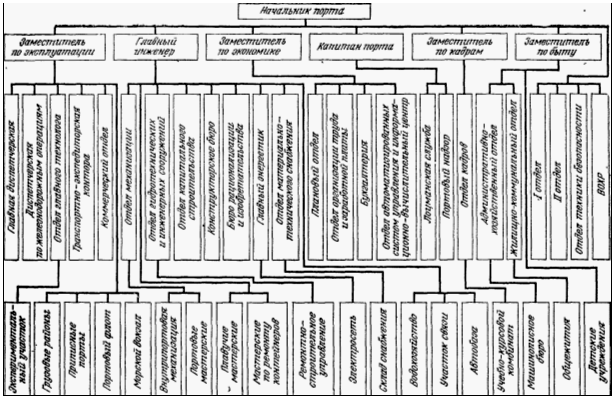
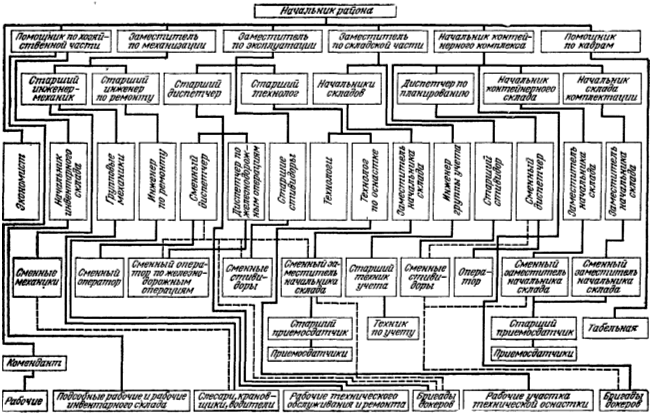

... навыки у докеров. 23. СИСТЕМА ОБЕСПЕЧЕНИЯ ПЕРЕГРУЗОЧНЫХ РАБОТ ТЕХНОЛОГИЧЕСКОЙ ОСНАСТКОЙ Система обеспечения оснасткой технологических процессов портовых перегрузочных работ включает: планирование поставки и производство механизмов и приспособлений; содержание их в исправном состоянии, т. е. регистрацию, освидетельствование с испытанием, периодические осмотры, техническое обслуживание и ...
0 комментариев