Постановка задачи
Опыт эксплуатации ПКП показывает, что система стабилизации ПКП является неотъемлемой частью ТС
Элементы системы и принципы их функционирования
Алгоритм функционирования системы
Затраты на этапе разработки
Материальные затраты
Общие затраты на этапе разработки
Затраты на содержание оборудования
Общие затраты на 1 год производства
Безопасность жизнедеятельности
Постановка задачи
Навигация
Алгоритм функционирования системы
Система автоматической стабилизации пневмоколесной платформы для транспортировки крупногабаритных грузов
105355
знаков
15
таблиц
0
изображений
2.6. Алгоритм функционирования системы
В алгоритме работы системы можно выделить три основные части: выравнивание платформы в поперечной плоскости, выравнивание платформы в продольной плоскости и стабилизация платформы на заданной высоте. Три входных параметра системы, один из которых задаваемый, контролируются обратной связью.
Система управления последовательно опрашивает датчики положения платформы и последовательно отслеживает горизонтальность платформы и дорожный просвет (высоту платформы). Следует отметить, что проектируемая система не способна одновременно выравнивать платформу в двух плоскостях и контролировать ее высоту.
Непосредственно после инициализации системы производится ввод информации о текущем поперечном крене платформы a с соответствующего датчика. Горизонтальность платформы в поперечной плоскости отслеживается следующим образом. Если крен платформы в заданной плоскости отличен от нуля, определяется знак этого отклонения, иначе говоря, на какой борт - на левый или на правый, наблюдается крен. Если угол поперечного крена отрицателен (крен на левый борт), микропроцессор вырабатывает управляющие сигналы на соответствующие блоки гидрораспределителей с целью приподнять левый борт платформы и одновременно на ту же величину опустить ее правый борт, после чего вновь вводится информация о достигнутом поперечном крене. Если горизонтальность платформы в заданной плоскости обеспечить не удалось, система стабилизации снова вырабатывает управляющее воздействие на исполнительные механизмы в зависимости от величины и знака контролируемой на данном этапе величины. И так до тех пор, пока не будет достигнуто горизонтальное положение платформы в поперечной плоскости, о чем будет сигнализировать код нулевого крена опрашиваемого датчика. Получив этот сигнал, система переходит к следующему этапу работы.
На следующем этапе система автоматической стабилизации аналогичным образом осуществляет горизонтирование платформы в продольной плоскости. С датчика продольного крена j вводится информация о текущем продольном крене. Если крен отличен от нуля, определяется знак этого отклонения. Если угол продольного крена отрицателен (крен на нос), микропроцессор вырабатывает управляющие сигналы на соответствующие блоки гидрораспределителей с целью приподнять носовую часть платформы и одновременно на ту же величину опустить корму, после чего вновь вводится информация о достигнутом продольном крене. Если горизонтальность платформы в заданной плоскости обеспечить не удалось, система стабилизации снова вырабатывает управляющее воздействие на исполнительные механизмы в зависимости от величины и знака контролируемой на данном этапе величины. И так до тех пор, пока не будет достигнуто горизонтальное положение платформы в продольной плоскости, о чем будет сигнализировать код нулевого крена опрашиваемого датчика. Получив этот сигнал, система переходит к следующему этапу работы.
На третьем этапе работы контролируется дорожный просвет (высота) платформы. В систему вводится величина требуемой высоты поднятия платформы, которую устанавливает оператор посредством командоаппарата на пульте управления. Затем, следуя сложным, заранее записанным в память зависимостям, микропроцессор вычисляет текущий дорожный просвет, основываясь на информации с датчика уровня жидкости в гидробаке и массе сопутствующих факторов гидравлической природы. Полученное значение текущей высоты платформы сравнивается с заданным. Если они отличны, определяется знак отклонения. Текущая высота меньшая заданной свидетельствует о необходимости поднятия платформы, текущая высота большая заданной - о необходимости опускания платформы. На следующем шаге микропроцессор вырабатывает управляющие сигналы на все блоки гидрораспределителей с целью приподнять платформу или ее опустить, после чего вновь определяется текущая высота платформы и сравнивается с заданной. Если они стали равны, система возвращается к первому этапу своего функционирования для отслеживания горизонтального положения платформы. После чего алгоритм повторяется снова.
3. Экономическая часть.
Разработка системы автоматической стабилизации пневмоколесной платформы является актуальной и эффективной. Актуальность разработки заключается в том, что при современном уровне развития вычислительной техники существует возможность перейти от постоянного ручного контроля положения платформы оператором к автоматическому отслеживанию заданных параметров при помощи микропроцессорной системы управления. Это повлечет за собой радикальное снижение утомляемости оператора и, как следствие, повышение надежности перевозки грузов. Переключение внимания оператора с платформы на дорогу повысит скорость и безопасность перевозки, что позволит за то же время выполнить большее количество рейсов.
Эффективность разработки системы автоматической стабилизации пневмоколесной платформы состоит в том, что она позволяет исключить ошибочные действия оператора, вызванные его утомлением, и повысить скорость восстановления безопасного горизонтального положения платформы при быстро меняющихся внешних условиях. Тем самым резко снижается риск возникновения чрезвычайных ситуаций при транспортировке, что позволяет расширить номенклатуру перевозимых грузов.
Таким образом, электронная система управления платформой позволит повысить технико-экономические показатели ТС для перевозки крупногабаритных и неделимых грузов.
Расчеты экономических показателей выполнены в трех разделах: затраты на этапе разработки, затраты на этапе производства, приведенные к одному году и расчет доходов и затрат на один год производства.
Похожие работы
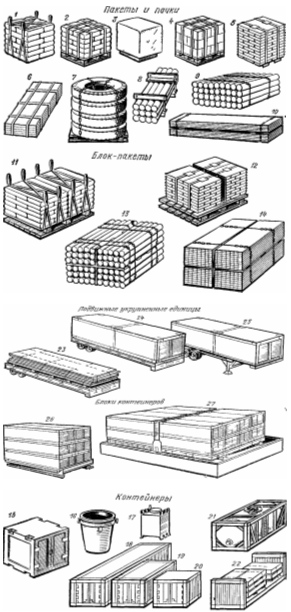

... навыки у докеров. 23. СИСТЕМА ОБЕСПЕЧЕНИЯ ПЕРЕГРУЗОЧНЫХ РАБОТ ТЕХНОЛОГИЧЕСКОЙ ОСНАСТКОЙ Система обеспечения оснасткой технологических процессов портовых перегрузочных работ включает: планирование поставки и производство механизмов и приспособлений; содержание их в исправном состоянии, т. е. регистрацию, освидетельствование с испытанием, периодические осмотры, техническое обслуживание и ...
0 комментариев