Постановка задачи
Опыт эксплуатации ПКП показывает, что система стабилизации ПКП является неотъемлемой частью ТС
Элементы системы и принципы их функционирования
Алгоритм функционирования системы
Затраты на этапе разработки
Материальные затраты
Общие затраты на этапе разработки
Затраты на содержание оборудования
Общие затраты на 1 год производства
Безопасность жизнедеятельности
Постановка задачи
Навигация
Элементы системы и принципы их функционирования
Система автоматической стабилизации пневмоколесной платформы для транспортировки крупногабаритных грузов
105355
знаков
15
таблиц
0
изображений
2.5. Элементы системы и принципы их функционирования
Для работы микропроцессорной системы управления требуется информация о текущих продольном и поперечном кренах платформы, а также о текущей и требуемой высоте платформы.
Выбирая датчик положения (табл. 2.2.), прежде всего, необходимо правильно определить приоритеты по следующим критериям:
· разрешение и точность;
· линейность;
· скорость измеряемого процесса;
· условия применения и класс защиты;
· надёжность;
· габаритные размеры;
· стоимость.
Расставив приоритеты, необходимо учесть, что датчик может определять абсолютное или относительное положение контролируемого объекта. Исходя из этого, существуют два основных метода определения положения и измерения перемещений. В первом методе датчик вырабатывает сигнал, являющийся функцией положения одной из его частей, связанных с подвижным объектом, а изменения этого сигнала отражают перемещение. Такие датчики положения называются абсолютными. К ним относятся:
· резистивные (потенциометрические) датчики;
· индуктивные датчики с подвижным сердечником;
· ёмкостные датчики с подвижными обкладками;
· цифровые кодовые датчики абсолютных значений.
Во втором методе датчик генерирует единичный импульс на каждом элементарном перемещении, а положение определяется подсчётом суммы импульсов в зависимости от направления перемещения. Такие датчики положения называются относительными. Достоинством таких датчиков, по сравнению с абсолютными, является простота и низкая стоимость, а недостатком — необходимость периодической калибровки и дальнейшей микропроцессорной обработки.
Табл. 2.2. Сравнительная характеристика различных видов датчиков
| Технологические требования при измерительном процессе | Типы датчиков | ||||||||||||||||||||||
| Потенцио-метри-ческий, | Потенцио-метри-ческий, | Емкост-ной | Индук-тивный LVDT | Инкрементальный | Абсолютный | ||||||||||||||||||
| Оптоэлект-рический | Магнитно-резис | Механи-ческий | Оптоэлект-рический | Магнитно- | Механи-ческий | ||||||||||||||||||
| Очень высокое разрешение | нет | нет | нет | Некото-рые модели | да | нет | нет | да | нет | нет | |||||||||||||
| Высокое разрешение | нет | да | да | да | да | нет | нет | да | нет | нет | |||||||||||||
| Низкое разрешение | да | да | да | да | да | да | да | да | да | да | |||||||||||||
| Скорость процесса >5 м/с | нет | Некото-рые модели | да | Некото-рые модели | нет | нет | нет | да | нет | нет | |||||||||||||
| Малые размеры | да | да | нет | Некото-рые модели | Некото-рые модели | Некото-рые модели | да | Некото-рые модели | Некото-рые модели | Некото-рые модели | |||||||||||||
| Высокий класс защиты (IP65) | да | да | нет | да | Некото-рые модели | Некото-рые модели | нет | Некото-рые модели | Некото-рые модели | нет | |||||||||||||
| Использование в э/магнитном поле | да | да | нет | нет | да | нет | да | да | нет | да | |||||||||||||
| Требуется дальнейшая цифровая обработка | нет | нет | нет | нет | да | да | да | нет | нет | нет | |||||||||||||
| * Сильно осциллирующие движения | нет | Некото-рые модели | да | да | да | да | нет | да | да | нет | |||||||||||||
| Стоимость | низкая | низкая | средняя | высокая | Зависит сильно от разре | средняя | низкая | высокая | средняя | средняя | |||||||||||||
* Возможность работы в режиме измерения частых, повторяющихся движений
малой амплитуды.
Потенциометрический датчик - переменный резистор, включенный по схеме потенциометра. Служат для преобразования угловых или линейных механических перемещений в соответствующее изменение сопротивления. С помощью этих датчиков осуществляется контроль за положением задвижек, клапанов и т. д. Основой такого датчика вполне может быть переменный резистор промышленного производства, обычно подключенный к некоторому механическому преобразователю перемещения. Слабое место таких датчиков - наличие подвижного контакта. У проволочных резисторов существует зона нечувствительности, обусловленная дискретным изменением сопротивления при перемещении щетки с витка на виток.
Потенциометр - чаще проволочный (но может быть и угольный) резистор (реостат) с движком, который скользит вдоль резистора. Таким образом, по существу п. является резистором с переменным сопротивлением. Потенциометры бывают линейными и круговыми (в зависимости от характера перемещения его регулирующего органа). Потенциометры часто выполняют роль преобразователей перемещения в электрическую величину - напряжение (для линейных перемещений -линейные потенциометры, для угловых перемещений - круговые). Вообще говоря, потенциометрический преобразователь по определению является параметрическим, т.е. его выходной величиной является сопротивление. Однако простыми средствами с него можно получить и напряжение, пропорциональное перемещению движка, если к концам резистора подвести напряжение питания, а выходное напряжение снимать с движка.
Переменные резисторы могут иметь различный характер зависимости сопротивления от изменения угла поворота подвижного контакта (рис.2.8.).
Рис. 1.8. Характеристики потенциометрических датчиков
Вид характеристики указывает маркирующая буква на корпусе резистора.
· А - с линейной зависимостью
· Б - с логарифмическим законом изменения сопротивления
· В - c обратной логарифмической зависимостью
Основное достоинство - простота конструкции и дешевизна, легко сопрягаются с электронной схемой. Иногда применяют реохордные датчики, у которых контакт скользит вдоль оси натянутой проволоки, что позволяет получить непрерывную характеристику, без зон нечувствительности. Встречаются конструкции с жидким резистом, менее распространенные из - за явлений электролиза. Надежность контактных систем резко падает, если напряжение, приложенное к контакту меньше определенной величины (зависящей от конструкции контакта).
В проектируемой системе для получения текущего значения высоты платформы используется поплавковый датчик уровня рабочей жидкости в гидробаке. Уровень определяется путем регистрации положения поплавка, плавающего на поверхности рабочей жидкости. Поплавок с помощью тросика связан с отсчетным механизмом, преобразующим вертикальное перемещение поплавка в электрический сигнал.
Перемещение поплавка производится по направляющим тросикам, натянутым между корпусом датчика и якорем на дне емкости. Корпус поплавка изготовлен из нержавеющей стали.
Потенциометрический датчик модели ПЛЦ 001 (рис 2.9.), разработанный в Научно-исследовательском Институте Физических Исследований (НИИФИ), предназначен для измерения линейных перемещений объектов. Датчик характеризуется высокой надежностью в условиях воздействия вибраций и температур.
Рис. 2.9. Датчик линейных перемещений ПЛЦ 001
Основные технические характеристики датчика приведены в табл. 2.3.
Табл. 2.3. Технические характеристики датчика ППЦ 001
| Диапазон измерений | мм | 0-500 | ||
| Погрешность | % | 1,5 | ||
| Выходной сигнал | начальный | В | 0 | |
| номинальный | 6 | |||
| Напряжение питания | В | 6± 1 | ||
| Температура окружающей среды | ° С | -120/+160 | ||
| Вибрационные ускорения | м/с2 | 300 | ||
| Масса | кг | 0,3 | ||
Информацию о текущих углах крена платформы в продольной и поперечной плоскостях вырабатывают датчики угла наклона КЛИН-1 (рис. 2.10.)
Рис. 2.10. Датчик угловых перемещений КЛИН-1
Основные технические характеристики датчика приведены в табл. 2.4.
Табл. 2.4. Технические характеристики датчика КЛИН-1
| Диапазон измерений | град. | ± 10, ± 30, ± 60, ± 90 | |
| Частотный диапазон | Гц | 0-8 | |
| Погрешность | % | 0,05 | |
| Температурная нестабильность коэффициента преобразования | % / ° С | 0,02 | |
| Температурная нестабильность начального уровня | В/° С | 0,001 | |
| Выходное напряжение | В | 0-5 | |
| Напряжение питания | В | ± (15± 1,5) | |
| Ток потребления | А | 0,05 | |
| Температура окружающей среды | ° С | -50/+60 | |
| Вибрационные ускорения | м/с2 | 350 | |
| Масса | кг | 0,8 |
В проектируемой системе исполнительными устройствами, получающими информацию от микропроцессора, являются электрически управляемые гидрораспределители. Это определяется соображениями лёгкости и точности управления для оператора и, также, возможностью размещения гидрораспределителя в возможно более удобном для этого месте, независимо от месторасположения оператора.
Основными задачами, стоящими перед изготовителями гидрораспределителей являются: обеспечение минимально возможных гидравлических потерь (снижение энергетических затрат, вызывающих повышенный расход топлива, нагрева рабочей жидкости) при минимально возможных габаритах, точность выполнения перемещений основных золотников, обеспечивающих выполнение рабочих движений, оптимальный характер автоматических процессов загрузки гидросистемы в зависимости от нагрузки на рабочие органы.
Гидросистема с пропорциональным электрическим управлением требует повышенного внимания к чистоте рабочей жидкости (рекомендуемая тонкость фильтрации 10 мкм). В случае обеспечения требований по чистоте рабочей жидкости, гидросистема обеспечивает долговечную и надёжную эксплуатацию.
Рис. 2.11. Характеристики гидрораспределителей
Гидрораспределители подают в специальные гидроцилиндры объем рабочей жидкости, пропорциональный входному напряжению и через них подают жидкость в гидробалансирные группы.
Графики зависимости изменения проходных сечений золотниковых пар от величины хода золотников приведены на рис. 2.11. Анализ формы кривых показывает, что она близка к параболической, т. е. с постоянной «чувствительностью», что подразумевает постоянную величину отношения прироста расхода к самой величине расхода в каждой точке графика при равном значении величины изменения управляющего сигнала. Например, если при изменении управляющего сигнала расход изменяется с 10 л/мин. до 12 л/мин., то при таком же изменении управляющего сигнала в диапазоне расхода, равном, например, 80 л/мин. он изменится до 96 л/мин. (Видно, что относительное изменение расхода постоянно и равно 20%). Такая характеристика зависимости и форма графика называются «прогрессивными».
Для применения в системе управления в качестве задатчика аналогового сигнала предназначен командоаппарат. Оператор ПКП вводит требуемое значение высоты подъема платформы посредством командоаппарата с потенциометрическим датчиком.
Рис. 2.12. Командоаппарат потенциометрический КПМ11ФУ
Командоаппарат потенциометрический КПМ11ФУ (рис. 2.12), маховичковый с асимметричной шкалой, однооборотный, встроен в панель пульта (утопленный). Маховичок может поворачиваться на угол от 0 до 350 градусов и фиксироваться в любом положении. В командоаппарате установлен потенциометр сопротивлением 2 кОм (рис.2.13.), предельная мощность рассеивания 1Вт, Uпит= 24В постоянного тока, Uвых=0...10В, Iвых=0...12мА. Для соединения с внешними цепями в командоаппарате предусмотрен клемм
ник.
Рис.2.13. Схема электрическая командоаппарата КПМ11ФУ
На листе 8 изображен общий вид командоаппарата, посредством которого оператор задает требуемую высоту платформы.
Командоаппарат установлен на пульте управления в кабине водителя. Для того, чтобы закрепить командоаппарат на монтажной панели в последней выполняются два отверстия диаметром 7 и 28 мм. Меньшее отверстие предназначено для фиксации командоаппарата относительно монтажной панели. В это отверстие входит стопорный штифт. Толщина монтажной панели может колебаться в диапазоне от 2 д 4 мм.
Над монтажной панелью выступает лишь маховичок командоаппарата и диск с нанесенной на него шкалой, которая проградуирована в сантиметрах поднятия платформы над дорожным полотном. Диск-шкала неподвижен, а стрелка-указатель закреплена на вращающемся относительно диска валу маховичка.
Под монтажной панелью скрыт сам механизм потенциометра и клеммник. Потенциометр заключен в цилиндр. Угловое положение маховичка передается к нему посредством зубчатых колес, закрепленных между двумя неподвижными пластинами. Эти пластины стянуты четырьмя болтами по периметру. К нижней пластине посредством винтового соединения прикреплен клеммник с расположенными на нем клеммами, к которым подводится питающее и снимается выходное напряжение.
Электронный блок управления системой стабилизации ПКП включает в себя:
- Однокристальную микроЭВМ КМ1816ВЕ51;
- БИС программируемого параллельного интерфейса КР580ВВ55;
- БИС аналогово-цифровой системы сбора данных К572ПВ4;
- Аналогово-цифровой преобразователь К1113ПВ1;
- Буферный регистр 588ИР2;
- Микросхемы памяти:
- ОЗУ - КР537РУ8;
- ПЗУ - КР556РТ15;
- Соединительные элементы.
МикроЭВМ КМ1816ВЕ51 является основным элементом электронного блока управления системой автоматической стабилизации. Она имеет в своем составе следующие аппаратурные средства:
- процессор, в состав которого входят однобайтное арифметико-логическое устройство и схемы реализации команд умножения и деления;
- ППЗУ программ емкостью 4 Кбайт;
- ОЗУ данных емкостью 128 байт;
- Два шестнадцатибитных таймера/счетчика;
- Программируемые схемы ввода/вывода (32 линии);
- Блок двухуровневого векторного прерывания от пяти источников и др.
МикроЭВМ выполнена на основе высокоуровневой n-МОП технологии и выпускается в корпусе БИС, имеющем 40 внешних выводов. Для работы микроконтроллеру требуется один источник питания +5 В. Через четыре программируемых порта ввода/вывода микроЭВМ взаимодействует со средой в стандарте ТТЛ с тремя состояниями выхода.
Корпус КМ1816ВЕ51 имеет два вывода для подключения кварцевого резонатора, четыре вывода для сигналов, управляющих режимом работы микроконтроллера и два вывода для подключения питания.
Микроконтроллер может работать в диапазоне частот от 1,2 до 12 МГц, при этом минимальный цикл выполнения команды равен 1 мкс, а быстродействие равно одному миллиону операций простой пересылки в секунду.
МикроЭВМ организует работу всей системы. В соответствии с введенной в него программой, микроконтроллер путем периодического опроса сигналов состояния объекта, сформированных датчиками объекта управления, генерирует выходные сигналы управления исполнительными механизмами.
Учитывая тот факт, что в данной системе будет использована внешняя память данных, линии портов 0 и 2 микропроцессора организуют общую разделяемую память адреса/данных, работающую в режиме временного мультиплексирования. При этом через порт 0 сначала выводится младший байт адреса внешней памяти, а затем выдается или принимается байт данных (мультиплексированная шина). Через порт 2 выводится старший байт адреса в тех случаях, когда разрядность адреса равна 16 бит (как и в данной системе).
Структура микроконтроллера КМ1816ВЕ51 и система его команд таковы, что в случае необходимости его функциональные возможности могут быть расширены. С использованием внешних дополнительных БИС постоянной и оперативной памяти расширяется адресное пространство микроконтроллера, а путем подключения интерфейсной БИС увеличивается также и число линий связи с объектом управления (в случае необходимости - практически без ограничения).
Микроконтроллер КМ1816ВЕ51 через порт 1 осуществляет функции управления электронными блоками гидрораспределителей, выдавая "1" или "0" на соответствующий выход.
Для расширения системы ввода/вывода используется схема параллельного интерфейса КР580ВВ55. Порты схемы адресуются как ячейки внешней памяти данных, то есть схема параллельного интерфейса связана с микроконтроллером шиной адрес/данные порта 0.
Схема КР580ВВ55 имеет четыре двунаправленных порта (один 8 бит - связь с микроконтроллером и три по 8 бит).
Линии схемы запрограммированы следующим образом:
- 5 линий канала А (порт 0) - вывод сигналов управления БИС аналогово-цифровой системы сбора данных К572ПВ4;
- 8 линий канала В (порт 1) - ввод данных с БИС аналогово-цифровой системы сбора данных К572ПВ4;
- 8 линий канала С (порт 2) - ввод данных с аналогово-цифрового преобразователя К1113ПВ1.
Выходные сигналы с аналоговых датчиков положения, в силу их физической природы, требуют промежуточного преобразования перед вводом информации от них в микропроцессор.
Для этой цели в системе используется БИС аналогово-цифровой системы сбора данных К572ПВ4. Микросхема К572ПВ4 аналого-цифровой системы (АЦС) сбора данных предназначена для преобразования аналоговых сигналов, поступающих по восьми параллельным каналам в цифровой код с последующим его сохранением в ОЗУ и считыванием во внешнем МП в режиме прямого доступа к памяти. Микросхема АЦС К572ПВ4 изготовлена по КМОП технологии. В основе ее лежит восьмиразрядный аналогово-цифровой преобразователь последовательного приближения. Кроме того, в состав микросхемы входят: восьмиканальный мультиплексор, ОЗУ на 64 бит с произвольной выборкой, буферные схемы с тремя устойчивыми состояниями, а также схема управления.
Система сбора данных обеспечивает непосредственное сопряжение с МП, имеющими как раздельные, так и общие шины адреса и данных. Управление К572ПВ4 осуществляется от МП логическими сигналами ТТЛ и КМОП уровней. Режим прямого доступа к памяти реализуется в соответствии с алгоритмом последовательной обработки аналоговых сигналов по восьми независимым входам.
Данная схема в составе проектируемой микропроцессорной системы задействует всего три входа из восьми по количеству датчиков положения объекта управления.
Полупроводниковая БИС функционально завершенного АЦП типа К111ЗПВ1 предназначена для применения в электронной аппаратуре в составе блоков аналогового ввода. Микросхема выполняет функцию аналого-цифрового преобразования однополярного или биполярного входного сигнала с представлением результатов преобразования в параллельном двоичном коде. Она содержит все функциональные узлы АЦП ПП. Выходные каскады позволяют считывать результат преобразования непосредственно на шину данных МП. Несколько АЦП могут обслуживать один МП и наоборот. По уровням входных и выходных сигналов АЦП сопрягается с цифровыми ТТЛ ИС.
Между микроЭВМ и подсистемой внешней памяти данных (ОЗУ и ПЗУ) имеется микросхема буферного регистра 588ИР2. Его назначение - запись и хранение кода адреса при работе микроконтроллера с внешней памятью данных. Буферный регистр 588ИР2 относится к регистрам хранения. Совместимый с микропроцессорами, он имеет 12 разрядов с тремя устойчивыми состояниями на выходе.
В подсистеме памяти используются две микросхемы:
Микросхема ОЗУ - КР537РУ8. Данная серия микросхем наиболее развита. Она включает в себя более 20 типономиналов микросхем, отличающихся друг от друга информационной емкостью (от 1024 до 65536 бит), организацией (одноразрядная и словарная), быстродействием (более чем в пять раз), потребляемой мощностью. Общими свойствами микросхем являются: единое напряжение питания 5 В, уровни ТТЛ входных и выходных сигналов, схема выхода с тремя состояниями и др. Таким образом, при необходимости увеличения ОЗУ достаточно взять микросхему большей емкости той же серии.
Микросхема КР537РУ8 имеет емкость 2К х 8 байт и работает в режиме записи, считывания и хранения информации, в зависимости от сигналов управления, приходящих с микроконтроллера.
Микросхема ПЗУ КР556РТ15 также имеет емкость 2К х 8 байт и тип входа - с тремя состояниями ТТЛ.
При необходимости увеличения ПЗУ данная микросхема может быть заменена на микросхему КР556РТ16 емкостью 8К х 8 байт или другую, большей емкости.
Необходимо отметить также и то, что при увеличении ОЗУ и/или ПЗУ потребуется заменить 12-разрядный буферный регистр 588ИР2 (так как 212 = 4096 бит = 4 Кбайт) на регистр с большим количеством разрядов или подключить оставшиеся 4 линии порта 2 микроконтроллера непосредственно к микросхемам памяти. В этом случае объем адресуемого пространства составит 216 = 65536 бит = 65 Кбайт.
Описание работы структурной схемы.
Уровень напряжения с датчиков положения платформы поступает в БИС цифровой системы сбора данных, преобразуется в цифровой код и подается на вход БИС ППИ. Задатчик высоты платформы также вырабатывает аналоговый сигнал и поэтому нуждается в преобразовании перед входом в МПС.
БИС ППИ передает информацию микропроцессору. Микропроцессор сообщается с подсистемой внешней памяти посредством двусторонней шины адреса/данных. Обмен данными производится через буферный регистр.
Микропроцессор вырабатывает код управляющего воздействия и записывает его в регистры, откуда сигнал поступает к электрически управляемым гидрораспределителям.
Похожие работы
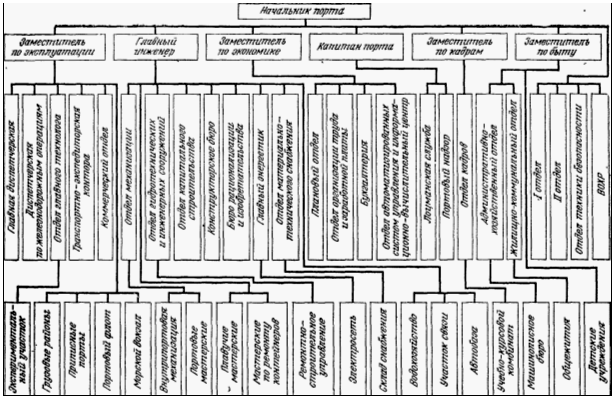
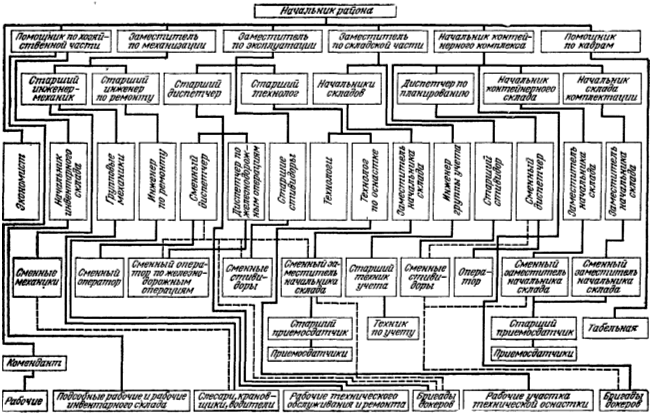

... навыки у докеров. 23. СИСТЕМА ОБЕСПЕЧЕНИЯ ПЕРЕГРУЗОЧНЫХ РАБОТ ТЕХНОЛОГИЧЕСКОЙ ОСНАСТКОЙ Система обеспечения оснасткой технологических процессов портовых перегрузочных работ включает: планирование поставки и производство механизмов и приспособлений; содержание их в исправном состоянии, т. е. регистрацию, освидетельствование с испытанием, периодические осмотры, техническое обслуживание и ...
0 комментариев