Навигация
Технические средства предупреждения пожаров и взрывов на производстве
158228
знаков
4
таблицы
0
изображений
6.6 Технические средства предупреждения пожаров и взрывов на производстве.
Успешное тушение пожара в значительной степени зависит от правильно организованной и надежно действующей связи и сигнализации. Пожарной связью называется комплекс устройств, позволяющих быстро принимать сообщения о возникновении пожара и оперативно отдавать необходимые распоряжения по его ликвидации. Система пожарной сигнализации состоит из пожарных извещателей, линий связи и приемных станций.
Связь пожарной охраны по своему назначению подразделяется на связь извещения, диспетчерскую и связь на пожаре. Основным показателем эффективности работы пожарной сигнализации является время от начала возникновения очага пожара на контролируемом объекте до выдачи сигнала тревоги на диспетчерском пункте, а при наличии автоматических средств тушения — до выдачи сигнала для приведения в действие средств тушения. Чем меньше указанное время, тем выше вероятность ликвидации пожара.
На предприятиях для предупреждения пожаров и взрывов применяются различные технические средства. Различают две группы этих средств: общие, не зависящие от вида производственного процесса, и специальные, характерные для конкретного производства и оборудования.
К общим техническим средствам относятся: защитное заземление, зануление, автоматическое отключение, нейтрализаторы статического электричества, а также молниезащита, предохраняющая производство от разрядов электричества.
Кроме того, к общим техническим средствам предупреждения пожаров относятся противопожарная сигнализация и связь. Автоматическая пожарная сигнализация состоит из трех основных устройств: пожарных извещателей (датчиков), линии связи, приемной связи или коммутатора. Пожарный извещатель является основным элементом автоматического средства обнаружения пожара. Пожарные извещатели делятся на извещатели ручного
действия и автоматические. Извещатели ручного действия обеспечивают однозначную передачу сигнала тревоги на приемный пульт и получение обратного сигнала с пульта, подтверждающего прием сигнала. Различают простые и кодовые извещатели ручного действия. Простые извещатели при нажатии кнопки обеспечивают разрыв соответствующей электрической цепи. В сеть сигнализации эти извещатели включаются радиально. Такие схемы включения называют лучевыми. Кодовые извещатели снабжены специальными кодонаборными механизмами, которые приводятся в действие при нажатии пусковых кнопок. Каждый извещатель имеет соответствующий номер кода. Такие извещатели включаются в кольцевую (шлейфную) линию связи, что позволяет сэкономить значительное количество провода по сравнению с лучевым способом включения.
В зависимости оттого, какой из параметров газовоздушной среды вызывает срабатывание автоматического пожарного извещателя, они делятся на тепловые, ультрафиолетового излучения (световые), ионизационные (дымовые), ультразвуковые и др. По принципу действия нзвещатели делятся на максимальные и дифференциальные. Максимальные извещатели реагируют на определенные, абсолютные величины контролируемого параметра. Дифференциальные извещатели реагируют только на определенную скорость изменения контролируемого параметра.
6.7 Мероприятия по обеспечению пожарной безопасности.
Во всех производственных, административных, складских и вспомогательных помещениях на видных местах должны быть вывешены таблички с указанием номера телефона вызова пожарной охраны.
На каждом предприятии приказом (инструкцией) должен быть установлен соответствующий их пожарной опасности противопожарный режим, в том числе:
определены и оборудованы места для курения;
определены места и допустимое количество единовременно находящихся в помещениях сырья, полуфабрикатов и готовой продукции;
установлен порядок уборки горючих отходов и пыли, хранения промасленной спецодежды;
определен порядок обесточивания электрооборудования в случае пожара и по окончании рабочего дня.
Регламентированы: порядок проведения временных огневых и других пожароопасных работ; порядок осмотра и закрытия помещений после окончания работы; действия работников при обнаружении пожара.
Определены порядок и сроки прохождения противопожарного инструктажа и проведения занятий по мерам пожарной безопасности, а также назначены ответственные за их проведение.
В зданиях и сооружениях (кроме жилых домов) при единовременном нахождении на этаже более 10 человек должны быть разработаны и на видных местах вывешены планы (схемы) эвакуации людей в случае пожара, а также предусмотрена система оповещения людей о пожаре.
Основными огнегасительнымн веществами являются вода, водные растворы, водяной пар, пена, углекислота, инертные газы, галоидированные углеводороды, сжатый воздух, порошки, песок, земля. Вода обладает высокой теплоемкостью и теплотой парообразования. Водные эмульсии галоидированных углеводородов обладают дополнительным огнегасительным эффектом. Водяной пар применяют для тушения объектов с ограниченным воздухообменом и небольшим объемом (до 500 м3), а также небольших пожаров на открытых площадках. Пену получают в пеногенераторах. Пену делят на химическую и воздушно-механическую. Химическая пена получается из специальных порошков, состоящих нз кислотной и щелочной частей. При смешении порошка происходит реакция, в результате которой образуется углекислый газ. Специальные добавки (лакричного экстракта) образуют густую стойкую пену, которую через пожарный рукав и пенный ствол или пенослив подают в очаг пожара. Углекислота в снегообразном и газообразном состоянии применяется в огнетушителях и стационарных установках для тушения пожаров в закрытых помещениях и небольших открытых загораний. Инертные газы, применяемые для тушения загораний, снижают концентрацию кислорода в воздухе и уменьшают тепловой эффект реакции за счет потерь тепла па нагревание. Порошковые составы на основе карбонатов и бикарбонатов натрия применяются наиболее широко, несмотря на их высокую стоимость, сложность в эксплуатации и хранении. В частности они являются единственным средством тушения пожаров щелочных металлов и металлоорганических соединений. Для тушения таких пожаров применяются также песок, земля, флюсы.
Средства пожаротушения. Различают первичные, стационарные и передвижные средства пожаротушения. К первичным средствам пожаротушения относятся огнетушители, гидропомпы (небольшие поршневые насосы), ведра, бочки с водой, лопаты, ящики с песком, асбестовые полотна, войлочные маты, кошмы, ломы, пилы, топоры. Огнетушители бывают химические пенные (ОХП-10, ОХПВ-10 и другие), углекислотные (ОУ-2, ОУ-5, ОУ-8), углекислотно-бромэтиловые (ОУБ-3, ОУБ-7), порошковые (ОПС-6, ОПС-10).
Для различных объектов и помещений существуют нормы первичных средств пожаротушения. На каждые 100 м2 пола производственных помещений обычно требуется 1—2 огнетушителя. Время действия пенных огнетушителей 50—70 с, длина струи 6—8 м, кратность пены 5, стойкость 40 мин.
Углекислотные огнетушители наполнены сжиженным углекислым газом, находящимся под давлением 6 МПа. Для приведения их в действие достаточно открыть вентиль. Углекислый газ выходит в виде снега и сразу превращается в газ. Порошковые огнетушители применяются для тушения горящих щелочных металлов.
Заключение1 . Выполнен обзор литературных источников по кинематическому анализу рычажных механизмов , исследованию реечных механизмов транспортирования ткани, приведён обзор алгоритмов подпрограмм кинематического анализа групп Ассура: двухповодковых структурных групп 1, 2 и 3 модификации, кривошипа и звена механизма.
2. На примере механизма транспортирования ткани швейной машины 131-42+3 класса разработан алгоритм кинематического анализа механизма привода нижней рейки. Для этого проанализирована конструкция механизма, исходя из анализа которой механизм был разбит на кинематические цепи и структурные группы Ассура.
Алгоритм кинематического анализа представляет собой последовательность блоков, в каждом из которых анализируется кинематика отдельных структурных групп в порядке их присоединения к кривошипу при образовании кинематических цепей подачи, подъёма и рейки.
3. Для механизма транспортирования ткани швейной машины 131-42+3 класса разработан алгоритм кинематического анализа механизма привода верхней рейки. Для чего был проведён анализ конструкции механизма, на базе которого механизм верхней рейки был разбит на кинематические цепи и структурные группы Ассура. Алгоритм кинематического анализа представляет собой последовательность блоков, в каждом из которых анализируется кинематика отдельных структурных групп в порядке их присоединения к кривошипу при образовании кинематических цепей подачи, подъёма и рейки.
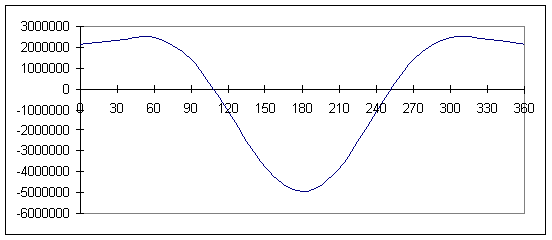
4. В соответствии с разработанными алгоритмами на языке программирования Си написана программа кинематического анализа механизма транспортирования ткани швейной машины 131-42+3 класса. Указанная программа позволяет исследовать кинематику движения верхней и нижней реек швейной машины без учёта силового замыкания верхней и нижней реек через ткань в процессе транспортирования. С помощью указанной программы получены графики: зависимость координат Х и Y нижней рейки от угла поворота главного вала ![]() и зависимость координат Х и Y верхней рейки от угла поворота главного вала
и зависимость координат Х и Y верхней рейки от угла поворота главного вала ![]() .
.
5. Рассмотрены вопросы организации работ по охране труда на предприятии, такие как: производственная санитария, вентиляция и кондиционирование воздуха, мероприятия по снижению шума, обеспечению пожарной безопасности.
Приведены допустимые уровни звукового давления и уровни звука в производственных помещениях, обращено внимание на необходимость соблюдения требований по технике безопасности, предъявляемым швейным машинам.
Список использованных источников1. Корн Г., Корн Т. Справочник по математике для научных работников и инженеров. – М.: Наука, 1973. – 832 с.
2. Зиновьев В.А. Курс теории механизмов и машин. – М.: Наука, 1975. – 204 с.
3. Левитский Н.И. Теория механизмов и машин. – М.: Наука, 1990.
4. Пейсах Э.Е., Нестеров В.А. Система проектирования плоских рычажных механизмов / Под ред. К.В.Фролова. – М.: Машиностроение, 1988. – 232 с.
5. Пейсах Э.Е. Определение положения звеньев трехповодковой и двух поводковой четырехзвенных структурных групп Ассура с вращательными парами. // Машиноведение. 1985. №5. С. 55-61.
6. Морошкин Ю. Ф. Доклады АН СССР. Т82, 1952, №4.
7. Артоболевский И.И. Теория механизмов и машин. – М.: Наука, 1975. – 640 с.
8. Джолдасбеков У.А., Байгунчеков Ж.Ж. Аналитическая кинематика плоских рычажных механизмов высоких классов. Алма-Ата: изд. Казах. гос. ун-та, 1980. – 105 с.
9. Озол О.Г. Аналитический метод треугольников в кинематике плоских рычажных механизмов. В кн.: Анализ и синтез механизмов. – М.: Машиностроение, 1966. С. 128-144.
10. Пейсах Э.Е. Синтез шарнирного шестизвенника с приближенным выстоем. // Механика машин. – М.: Наука, 1971, Вып. 29-30. С. 100-107.
11. Пейсах Э.Е. Справочные карты по синтезу шарнирного шестизвенника. // Механика машин. – М.: Наука, 1974. Вып. 44. С. 125-139.
12. Доронин В.И. Применение алгебраического метода в кинематическом синтезе плоских механизмов. // Изв. вузов. Сер. Машиностроение, 1968, №6. С. 5-9.
13. Тереньтьев В.Ф. Аналитический синтез шестизвенного шарнирно-рычажного механизма. // Изв. вузов. Сер. Машиностроение, 1976, №12. С. 65-68.
14. Доронин В.И., Рачек Н.М. Синтез шарнирных передаточных механизмов с помощью ЭЦВМ. // Механика машин. – М.: Наука, 1969. Вып. 15-16. С. 24-35.
15. Пейсах Э.Е. Оптимизационно-квадратический синтез плоских рычажных механизмов. // Машиноведение. 1986. №5. С. 71-77.
16. Муратов А.И. Синтез плоских рычажных механизмов высоких классов. // Механика машин. – М.: Наука. 1980. Вып. 57. С. 10-14.
17. Джолдасбеков У.А. Оптимальный синтез плоских рычажных механизмов высоких классов. / Вестник АН Казахской АССР Алма-Ата, 1981. Вып. 7. С. 35-41.
18. Макговерн (McGovern J.F.) Сандор (Sandor G.N.) Кинематический синтез регулируемых механизмов. Часть 2. Воспроизведение шатунных кривых. КиТМ, 1973, №2. С. 7-13.
19. Саркисян Ю.Л. К теории синтеза плоских шарнирных механизмов методом квадратического приближения функции. // Изв. АН Арм.ССР. Машиностроение, 1976. XXIX, №6. С. 3-9.
20. Доронин В.И. К синтезу шарнирно-рычажных направляющих механизмов методом квадратического приближения. // Труды ХабИИЖТа, вып. 29, 1967. С. 149-155.
21. Chi-Yeh H., A General Method for the Optimum Design of Mechanisms. Journal of Mechanisms. Vol. 1, 1966. pp. 301-313.
22. Mansour W.M., Osman M.O.M. The Method of Residues for the Synthesis of Coupler Curve Genarating Mechanisms. ASME Paper 70- Mech-53.
23. Hartley H.O. The Modified Gauss – Newton Method for the Fitting of Nonlinear Regression by Least Squares. Technometrics. vol. 3, 1961, pp. 269-280.
24. Эшенбах, Тесар Оптимизация шарнирных четырехзвенников, удовлетворяющих четырем обобщенным положениям в одной плоскости. // Конструирование и технология машиностроения. Изд. Мир. №1, 1969. С. 79.
25. Гаррет, Холл мл. Оптимизационный синтез многозвенников при помощи метода статистических испытаний. // Конструирование и технология машиностроения. Изд. Мир. №3, 1968. С. 40.
26. Nolle H. On Capability of Four Bar Mechanisms as Function Generators. Inst. Engrs. Australia, Mech. and Chem. Eng. Trans., VMC-3, #2, Nov. 1967, pp. 259-268.
27. Tomas IV J. The Synthesis of Mechanisms as Nonlinear Programming Problem. Journal of Mechanisms. Vol. 3, 1968. pp. 119-130.
28. Фокс (Fox R.L.), Уиллмерт (Willmert K.D.) Проектирование оптимальных механизмов, воспроизводящих заданную шатунную кривую при ограничениях в форме неравенств. // Конструирование и технология машиностроения. Изд. Мир. №1, 1967. С. 169.
29. Беллман Р.Э. Динамическое программирование. М.: Изд. Иностр. лит., 1960. – 400 с.
30. Gustavson R.E. Computer-Designed Car Window linkage. // Mechanical Engineering, September 1967. Pp. 45-51.
31. Льюис (Levis D.W.), Джиори (Gyory C.K.) Кинематический синтез плоских кривых. // Конструирование и технология машиностроения. Изд. Мир. №3, 1969. С. 96.
32. Багси (Bagsi C.), Ли (In-Ping Jack Lee) Оптимальный синтез плоских механизмов для воспроизведения траекторий и положений твердого тела с помощью метода линейной суперпозиции. // Конструирование и технология машиностроения. Изд. Мир. №1, 1975. С. 331-336.
33. Пейсах Э.Е. Критерии передачи движения для рычажных механизмов // Машиноведение. 1986, №1. С. 45-51.
34. Нечи (Nechi A.J.) Применение комбинации релаксационного и градиентного методов при моделировании на вычислительной машине плоской четырехшарнирной цепи. // Конструирование и технология машиностроения. Изд. Мир. №1, 1971. С. 106-113.
35. Льюис (Levis D.W.), Джиори (Gyory C.K.) Кинематический синтез плоских кривых. // Конструирование и технология машиностроения. Изд. Мир. №1, 1967. С. 202.
36. Пейсах Э.Е. Оптимизационный синтез рычажных механизмов. /Расчет и конструирование механизмов и деталей приборов. Л.: Машиностроение, 1975. С. 38-75.
37. Пейсах Э.Е. Метод блокируемых зон в синтезе шарнирно-рычажных механизмов // Механика машин. М.: Наука, 1969. Вып. 21-22. С. 15-28.
38. Reber. J. Neue Moglichkeiten bei der Syntese ebener Mechanismen durch iterative Analyse im Sinn von CAD. // Maschinenbautechnik, 1986. №6, s. 268-270.
39. Jonson A.L. The analysis of planar mechanisms by computer subroutine. //“Proc. 6th World Congr. Theory Mach. and Mech., New Delhi, Dec. 15-20, 1983. Vol.2.” New York e.a., 1984, p. 1252-1255.
40. Кикин А.Б., Пейсах Э.Е. Применение ПК в проектировании и исследовании рычажных механизмов. Труды международной конференции “Персональные компьютеры в проектировании и исследовании механизмов и агрегатов”, Санкт‑Петербург, 1996, с. 20-26.
41. Kikin A. B., Peisach E.E. SYNMECH: The computer system on synthesis of plane linkages. The Seventh International Symposium on Linkages and Computer Aided Design Methods – Theory and Practice of Mechanisms. SYROM’97. Bucharest, Romania, August 26‑30, 1997, Vol. 1, pp. 227-234.
42. Нестеров В.А., Пейсах Э.Е. База знаний по анализу и синтезу рычажных механизмов в компьютерной системе LINKAGES. // Вестник Московского авиационного института. 1995. №1. С.51-58.
43. Bawab S., Sabada S., Srinivasan U., Kinzel G.L., Waldron K.L. Automatic synthesis of crank driven four-bar mechanisms for two, three or four-position motion generation. // Trans. ASME J. Mech., Transmiss, and Autom. Des. 1997. №2, С.225-231.
44. Christem G., Quast V., Buchheem A.U. Auswahl funfglidriger Koppelmechanismen fur Bewegungsaufgaben mittels shneller Bahnkurvensimulation. // Konstruktion. 1994. №4. С.155-160.
45. Джолдасбеков У.А., Казыханов Х.Р., Петухов В.К. Машинный анализ кинематики механизмов. // Материалы I Всесоюзного съезда по ТММ, Алма‑Ата, Наука, 1977. с. 45.
46. Архипов Н.Н., Карпачев П.С., Майзель М.М., Плевако Н.А. Основные процессы, машины и аппараты легкой промышленности. – М.: Ростехиздат, 1961. – 492 с.
47. Архипов Н.Н., Карпачев П.С., Майзель М.М., Плевако Н.А. Основы конструирования и расчета типовых машин и аппаратов легкой промышленности. – М.: Машгиз, 1963. – 599 с.
48. Вальщиков Н.М., Зайцев Б.А., Вальщиков Ю.Н. Расчет и проектирование машин швейного производства. – Л.: Машиностроение, 1973. - 344 с
49. Гарбарук В.П. Расчет и конструирование основных механизмов челночных швейных машин. – Л.: Машиностроение, 1977. - 232 с.
50. Комиссаров А.И., Жуков В.В., Никифоров В.М., Сторожев В.В. Проектирование и расчет машин обувных и швейных производств. – М.: Машиностроение, 1978. – 431 с.
51. Маракушев Е.А., Русаков С.И., Эппель С.С. Машины швейного производства. Киев: Техника, 1967. - 321 с.
52. Полухин В.П., Рейбарх Л.Б. Швейные машины цепного стежка. – М.: Легкая индустрия, 1976. 352 с.
53. Полухин В.П., Милосердный Л.К. Конструктивно-унифицированный ряд швейных машин класса 31 с горизонтальной осью челнока. – М.: Легпромбытиздат, 1991. – 80 с.
54. Рейбарх Л.Б. Оборудование швейного производства. Л.: Легпромбытиздат, 1988. – 286 с.
55. Русаков С.И. Технология машинных стежков и наладка швейных машин. М.: Гизлегпром. 1959.
56. Червяков Ф.И. Швейные машины. / Ф.И.Червяков, А.А.Никоненко. – М.: Машиностроение, 1976. – 415 с.
57. Рубцов Б.А. Лабораторный практикум по машинам и аппаратам швейного производства: Учеб. пособие для вузов. – М.: Легпромбытиздат, 1995. – 256 с.
58. Исаев В.В. Оборудование швейных предприятий: Учеб. для проф.-техн. училищ. – 3-е изд., испр. и доп. – М.: Легпромбытиздат, 1989. – 336 с.
59. Франц В.Я. Исаев В.В. Швейные машины. – М.: Легпромбытиздат, 1986. – 181 с.
60. Полухин В.П. Проектирование механизмов швейно-обметочных машин. М.: Машиностроение, 1972. 280 с.
61. Mende S. Systematische Analyse der Transporteurgetribe von Nachmaschinen. // Textiltechnik, 1987, №9, s. 515-516
62. Закарая М.М., Гусаров А.В., Сторожев В.В. Анализ структурных ошибок в механизмах перемещения материала машин беспосадочного шва. // Техн., технол. и улучш. качества изделий легкой пром-сти. – М., 1990. С. 109-113.
63. Дзюба В.И., Орловский Б.В. Сравнительный анализ механизмов перемещения деталей и изделий, стачиваемых на швейной машине. // Изв. вузов. Технология легкой промышленности. 1982. №5 С. 101-106.
64. Милосердный Л.К. Разработка конструктивно-унифицированного ряда швейных машин с горизонтальной осью челнока: Автореф. … кан. техн. наук. М., 1989.
65. Сункуев Б.С., Рачок В.В., Ольшанский В.И., Смирнова В.Ф., Яцук А.А. К вопросу унификации механизмов швейных машин. // Соверш. техн. и технол. производств легкой пром-сти. М., 1981. С. 123-126.
66. Щербань Ю.Ю., Горобец В.А. Сравнительный анализ механизмов перемещения материалов швейных машин. // Изв. вузов. Технология легкой промышленности. 1989. №6. С. 106-109.
67. Щербань Ю.Ю. Горобец В.А. Алгоритм анализа структур механизмов с неголономными связями. // Киев. технол. ин-т легк. пром-сти. Киев, 1989.
68. Щербань Ю.Ю. Горобец В.А. Разработка адаптивного механизма перемещения материала. // Киев. технол. ин-т легк. пром-сти. Киев, 1989.
69. Щербань Ю.Ю. Горобец В.А., Скатерной В.А. Исследование механизмов комбинированной реечной подачи материала швейной машины. // Киев. технол. ин-т легк. пром-сти. Киев, 1986.
70. Павлова О.А., Прилепина М.А., Лопандин И.В., Юрьева Т.М. Разработка методов кинематического и динамического исследования многозвенных механизмов машин легкой промышленности с помощью ЭЦВМ единой серии и алгоритмического языка Фортран IV. // Повышение эффективности технол. проц. и оборуд в тектильной и легкой пром-сти. М., 1986. С. 72-73.
71. Щербань Ю.Ю., Горобец В.А. Исследование механизмов перемещения материалов швейных машин с верхней и нижней транспортирующей рейками. // Изв. вузов. Технология легкой промышленности. 1986. №2. С. 119-122.
72. Zhao Xifang, Zhang Zongming. Исследование механизма перемещения материала. // J. Shanhai Jiaotoung Univ. 1984. №6. С. 97-106.
73. Low Wangjiang, Hua Danian. Исследование кинематики механизмов продвижения материала. // J. China Text. Univ. 1992, №5. С. 63-72.
74. Щербань Ю.Ю. Горобец В.А. Алгоритм решения математической модели комбинированного перемещения материала. // Киев. технол. ин-т легк. пром-сти. Киев, 1986.
75. Лопандин И.В., Попов Ю.А., Юрьева Т.М. Система продвижения ткани «рейка - отклоняющаяся игла» в промышленных швейных машинах и ее анализ с помощью ЭВМ. // Автоматизация и комплексная механизация производственных процессов легкой промышленности. М., 1988. С. 68-74.
76. Ермолаев В.Ф., Лишанков В.А., Новгородцев В.А. Проектирование при помощи ЭВМ реечного механизма подачи материала. // Изв. вузов Технология легкой промышленности. 1979. №5 С. 124-128.
77. Сункуев Б.С. К синтезу регулируемых шестизвенных механизмов транспортирования ткани швейных машин. // Изв. вузов. Технология легкой промышленности. 1973, №3. С. 131-138.
78. Новгородцев В.А., Ермолаев В.Ф. Проектирование механизма импульсной подачи материала швейной машины. / Анал., динам. и применение сил. импульс. систем. Новосибирск, 1986. С. 115-122.
79. Смирнова В.Ф., Шарстнев В.П. Сункуев Б.С. Оптимизация механизма продвижения материала по углам передачи. // Изв. вузов. Технология легкой промышленности. 1992. №2-4.
80. Щербань Ю.Ю., Горобец В.А. Параметрический синтез механизма перемещения материала. // Киев. Технол. ин-т легк. пром-сти. – Киев. 1990.
81. Peisun Ma Проектирование механизмов швейных машин. // J. skanghai Tiafong Univ. 1987. №2. С. 102-111.
82. Masanori O., Hiroshi S. Исследование работы швейных машин. // J. Text. Mach. Soc. Jap. 1981. №9 C. 25-29.
83. Рейбарх Л.Б., Полухин В.П. Особенности процесса продвижения материала на высокоскоростных швейных машинах. // Изв. вузов. Технология легкой промышленности. 1982. №1. С. 112-114.
84. Щербань Ю.Ю., Горобец В.А., Носов М.С. Определение посадки материала при скоростном режиме транспортирования на швейных машинах. // Изв. вузов. Технология легкой промышленности. 1988. №2. С. 119-121.
85. Горобец В.А. Щербань Ю.Ю., Силивончик И.С. Транспортирующие органы швейных машин с микрошероховатой поверхностью. // Нов. в техн., технол. и орг. пр-ва швейных изделий: Тез. докл. науч.-практ. конф., Ужгород, 5-7 июня, 1991. - Киев, 1991. С. 17-18.
86. Горобец В.А. Щербань Ю.Ю., Силивончик И.С. Транспортирующие органы швейных машин с микрошероховатой поверхностью. // Изв. вузов. Технология легкой промышленности. 1991, №4. С. 98-104.
87. Mende S. Исследование взаимодействия транспортирующих органов швейной машины. // Textiltechnik, 1982, №5. С. 291-294, 266, 268.
88. Мазин Л.С. Марковец А.В. Луганцева Т.А. Новосёлов Г.А., Анализ и оптимальный синтез параметров механизмов транспортирования ткани швейных иашин: Учебное пособие. / под ред. Мазина Л.С. , СПГУТД. – С.-Петербург, 2000. – 188 с.
#include<stdio.H>
#include<conio.H>
#include<math.h>
#include<graphics.h>
#include<dos.h>
#include<bios.h>
/* описание постоянных */
#define pi M_PI
#define RAD M_PI/180
/* Описание функций */
void elips();
void raschet(float);
void draw(float);
void stoyka(float,float);
void polzushka(float,float,float);
void okno(float,float,float,float);
void ramka(float,float,float,float);
void grafiki();
void grafik(int);
void osi(float,float,float,float,int);
void help();
int traek1();
/* Описание глобальных переменных */
float n=1,t=4,R_C=3,DEK=0.7;
double O1A1=4., O5A2=0.6,
O1F=1.8,
KO4=24.,
FK=52.,
A1B=41.3,
A2H=69.,
O7H=66.5,
O7I=73.,
DB=18.,
O3C=20.,
BC=18.,
O2D=18.,
O3E=24.,
O4M=25.,
MN=18.,
EN=98.66,
EP=95.7,
PN=24.,
CR=204.,
O6R=15.,
O6S=20.,
O8V=43.,
O8W=52.5,
SV=100.,
SR=20.,
WL=23.25,
LX=20.,
IJ=33.5,
JU=26.,
UY=19.4,
Xo1=285, X=290,
Yo1=350, Y=210,
Xo2=-37.6,
Yo2=-16.6,
Xo3=-63.,
Yo3=-1.,
Xo4=56.,
Yo4=7.5,
Xo6=25.,
Yo6=181.,
Xo8=-55.5,
Yo8=104.9,
Xo5=0.,
Yo5=220.,
Xo7=-70.,
Yo7=160.9,
Xx=-32.,
Yx=72.,
Ystola=30.,
Xu=Xx-4,
Yu=Yx-10,
gam1=88,
gam2=-98,
gam3=360-136,
gam4=-180/M_PI*acos((O6R*O6R+O6S*O6S-SR*SR)/2/O6R/O6S),
gam5=-99.56,
gam6=90.,
QQ=90.,
beta=30.,
xq=64.1,
yq=9.3,
ZQb=27.9,
L1zb=29.,
LL1=8.;
double Xa1,Ya1,Xa2,Ya2,Xb,Yb,Xc,Yc,Xk,Yk,Xm,Ym,Xe,Ye,Xn,Yn,Xp,Yp,Xf,Yf,Xd,Yd,Xq,Yq,
Xz,Yz,Xr,Yr,Xs,Ys,Xv,Yv,Xw,Yw,Xh,Yh,Xi,Yi,Xl,Yl,Xj,Yj,Xy,Yy,Xqb,Yqb,Xzb,Yzb,Xl1,Yl1,
A,B,C,A2,B2,C2,A3,B3,C3,A4,B4,C4,A5,B5,C5,A6,B6,C6,A7,B7,C7,
A8,B8,C8,A9,B9,C9,EQ,R,A10,B10,C10,BB,CC,q,L1y,RRR,
cosfi2,sinfi2,cosfi5,sinfi5,cosfi4,sinfi4,cosfi3,sinfi3,alfa,
cosfi7,sinfi7,cosfi6,sinfi6,cosfi9,sinfi9,cosfi8,sinfi8,
cosfi11,sinfi11,cosfi10,sinfi10,cosfi13,sinfi13,cosfi12,sinfi12,
cosfi15,sinfi15,cosfi14,sinfi14,cosfi17,sinfi17,cosfi16,sinfi16,
cosfi19,sinfi19,cosfi18,sinfi18,cosfi20,sinfi20,cosfi21,sinfi21,
fi2,fi3,fi4,fi5,fi6,fi7,fi8,fi9,fi10,fi11,fi12,fi13,fi14,fi15,
fi16,fi17,fi18,fi19,fi20,fi21,fi22;
main()
{
float fi;
int GD=VGA,GM=1;
int key,sing=1,v_p=0,a_p=1,x_x=0;
char buffer [80];
initgraph(&GD,&GM,"c:\\borlandc\\bgi\\");
setbkcolor(0);
for(fi=0;fi<=360;fi+=5)
{
key=bioskey(1);
if(key!=0 && x_x==0) {x_x=1;getch();}
if(key==0x4400) break;
if(key==0x3b00) help();
if(key==0x3d00) {grafiki();key=0;n=1;t=4;Xo1=285;Yo1=350;okno(X-280,DEK*(Y-200),X+240,DEK*(Y+250));}
//if(key==0x231) sing=1;
//if(key==0x332) sing=2;
//if(key==0xb30) sing=0;
if(key==0x3920) getch();
if(key==0x11b) {n=1;t=4;Xo1=285;Yo1=350;}
if(key==0x4e2b ) {n+=1;}
if(key==0x4a2d && n>1) {n-=1;}
if(key==0x4800 ) {Yo1+=10*n;getch();}
if(key==0x5000 ) {Yo1-=10*n;getch();}
if(key==0x4b00 ) {Xo1+=10*n;getch();}
if(key==0x4d00 ) {Xo1-=10*n;getch();}
if(key==0x4e2b) t+=1;
if(key==0x4a2d) t-=1;
if(key!=0) {key=0;getch();}
setvisualpage(v_p);
setactivepage(a_p);
setfillstyle(1,3);
okno(X-280,DEK*(Y-200),X+240,DEK*(Y+250));
elips();
raschet(fi);
draw(fi);
setfillstyle(1,8);
bar(0,0,X-281,350);
bar(X+241,0,640,350);
bar(0,0,640,DEK*(Y-200));
bar(0,DEK*(Y+252),640,350);
okno(535,7,635,348);
okno(10,324,530,348);
setcolor(14);
outtextxy(290,338,"<SPACE> - Пауза");
outtextxy(15,338,"<ESCAPE> - Начальные параметры");
outtextxy(15,328,"<+/-> - Увеличение и уменьшение");
outtextxy(540,35,"<F3>-График");
outtextxy(540,50,"<F10>-Выход");
outtextxy(540,20,"<F1>-Помощь");
ramka(X-280,DEK*(Y-200),X+240,DEK*(Y+250));
sprintf(buffer,"fi21= %.1f°",RRR);
outtextxy(538,65,buffer);
sprintf(buffer,"fi22= %.1f°",fi22-360);
outtextxy(538,80,buffer);
sprintf(buffer,"fi3= %.1f°",fi3);
outtextxy(538,95,buffer);
sprintf(buffer,"fi4= %.1f°",fi4);
outtextxy(538,110,buffer);
sprintf(buffer,"fi5= %.1f°",fi5);
outtextxy(538,125,buffer);
sprintf(buffer,"fi6= %.1f°",fi6);
outtextxy(538,140,buffer);
sprintf(buffer,"fi7= %.1f°",fi7);
outtextxy(538,155,buffer);
sprintf(buffer,"fi8= %.1f°",fi8);
outtextxy(538,170,buffer);
sprintf(buffer,"fi9= %.1f°",fi9);
outtextxy(538,185,buffer);
sprintf(buffer,"fi10= %.1f°",fi10);
outtextxy(538,200,buffer);
sprintf(buffer,"fi11= %.1f°",fi11);
outtextxy(538,215,buffer);
sprintf(buffer,"fi12= %.1f°",fi12);
outtextxy(538,230,buffer);
sprintf(buffer,"fi13= %.1f°",fi13);
outtextxy(538,245,buffer);
sprintf(buffer,"fi14= %.1f°",fi14);
outtextxy(538,260,buffer);
sprintf(buffer,"fi15= %.1f°",fi15);
outtextxy(538,275,buffer);
sprintf(buffer,"fi16= %.1f°",fi16);
outtextxy(538,290,buffer);
sprintf(buffer,"fi17= %.1f°",fi17);
outtextxy(538,305,buffer);
sprintf(buffer,"fi18= %.1f°",fi18);
outtextxy(538,320,buffer);
sprintf(buffer,"fi19= %.1f°",fi19);
outtextxy(538,335,buffer);
setvisualpage(a_p);
delay(67);
if(v_p==0) v_p=1; else v_p=0;
if(a_p==0) a_p=1; else a_p=0;
if(fi>=360) fi=0;
}
getch();
closegraph();
return 0;
}
traek1()
{
float fi;
float N,M,Xmin=+32768,Xmax=-32768,Ymin=+32768,Ymax=-32768;
int i=0;
for(fi=0;fi<=360;fi+=1)
{
raschet(fi);
if(Xq<Xmin) Xmin=Xq;
if(Xq>Xmax) Xmax=Xq;
if(Yq<Ymin) Ymin=Yq;
if(Yq>Ymax) Ymax=Yq;
}
for(fi=0;fi<=360;fi++)
{
raschet(fi);
if(i==1){setcolor(4);line(n*N+Xo1,n*(-M)+Yo1,n*Xq+Xo1,n*(-Yq)+Yo1);}
N=Xq;M=Yq;i=1;
}
setcolor(14);
line(n*Xmin+Xo1,n*(-(Ymin+Ymax)/2)+Yo1,n*Xmax+Xo1,n*(-(Ymin+Ymax)/2)+Yo1);
line(n*(Xmin+Xmax)/2+Xo1,n*(-Ymax)+Yo1,n*(Xmin+Xmax)/2+Xo1,n*(-Ymin)+Yo1);
fi=0;
return 0;
}
void raschet(float fi)
{
Xa1=O1A1*cos(fi*RAD);
Ya1=O1A1*sin(fi*RAD);
Xa2=Xo5+O5A2*cos((87-fi)*RAD);
Ya2=Yo5+O5A2*sin((87-fi)*RAD);
Xf=O1F*cos((fi+gam3)*RAD);
Yf=O1F*sin((fi+gam3)*RAD);
A=pow(Xf-Xo4,2)+pow(Yf-Yo4,2)+KO4*KO4-FK*FK;
B=2*(Xf-Xo4)*KO4;
C=2*(Yf-Yo4)*KO4;
cosfi3=(A*B-C*sqrt(B*B+C*C-A*A))/(B*B+C*C);
sinfi3=(A*C+B*sqrt(B*B+C*C-A*A))/(B*B+C*C);
if(cosfi3>=0 && sinfi3>=0) fi3=180/M_PI*acos(cosfi3);
if(cosfi3<0 && sinfi3>0) fi3=180/M_PI*acos(cosfi3);
if(cosfi3<0 && sinfi3<0) fi3=180+fabs(180/M_PI*asin(sinfi3));
if(cosfi3>0 && sinfi3<0) fi3=360-180/M_PI*acos(cosfi3);
cosfi2=(KO4*cosfi3-(Xf-Xo4))/FK;
sinfi2=(KO4*sinfi3-(Yf-Yo4))/FK;
if(cosfi2>=0 && sinfi2>=0) fi2=180/M_PI*acos(cosfi2);
if(cosfi2<0 && sinfi2>0) fi2=180/M_PI*acos(cosfi2);
if(cosfi2<0 && sinfi2<0) fi2=180+fabs(180/M_PI*asin(sinfi2));
if(cosfi2>0 && sinfi2<0) fi2=360-180/M_PI*acos(cosfi2);
Xm=Xo4+O4M*(cosfi3*cos(gam2*RAD)-sinfi3*sin(gam2*RAD));
Ym=Yo4+O4M*(sinfi3*cos(gam2*RAD)+sin(gam2*RAD)*cosfi3);
Xk=Xf+FK*cosfi2;
Yk=Yf+FK*sinfi2;
Xd=Xo2+O2D*cos((90+beta)*RAD);
Yd=Yo2+O2D*sin((90+beta)*RAD);
A2=pow(Xa1-Xd,2)+pow(Ya1-Yd,2)+DB*DB-A1B*A1B;
B2=2*(Xa1-Xd)*DB;
C2=2*(Ya1-Yd)*DB;
cosfi5=(A2*B2+C2*sqrt(B2*B2+C2*C2-A2*A2))/(B2*B2+C2*C2);
sinfi5=(A2*C2-B2*sqrt(B2*B2+C2*C2-A2*A2))/(B2*B2+C2*C2);
if(cosfi5>=0 && sinfi5>=0) fi5=180/M_PI*acos(cosfi5);
if(cosfi5<0 && sinfi5>0) fi5=180/M_PI*acos(cosfi5);
if(cosfi5<0 && sinfi5<0) fi5=180+fabs(180/M_PI*asin(sinfi5));
if(cosfi5>0 && sinfi5<0) fi5=360-180/M_PI*acos(cosfi5);
cosfi4=(DB*cosfi5-(Xa1-Xd))/A1B;
sinfi4=(DB*sinfi5-(Ya1-Yd))/A1B;
if(cosfi4>=0 && sinfi4>=0) fi4=180/M_PI*acos(cosfi4);
if(cosfi4<0 && sinfi4>0) fi4=180/M_PI*acos(cosfi4);
if(cosfi4<0 && sinfi4<0) fi4=180+fabs(180/M_PI*asin(sinfi4));
if(cosfi4>0 && sinfi4<0) fi4=360-180/M_PI*acos(cosfi4);
Xb=Xa1+A1B*cosfi4;
Yb=Ya1+A1B*sinfi4;
A3=pow(Xb-Xo3,2)+pow(Yb-Yo3,2)+O3C*O3C-BC*BC;
B3=2*(Xb-Xo3)*O3C;
C3=2*(Yb-Yo3)*O3C;
cosfi7=(A3*B3-C3*sqrt(B3*B3+C3*C3-A3*A3))/(B3*B3+C3*C3);
sinfi7=(A3*C3+B3*sqrt(B3*B3+C3*C3-A3*A3))/(B3*B3+C3*C3);
if(cosfi7>=0 && sinfi7>=0) fi7=180/M_PI*acos(cosfi7);
if(cosfi7<0 && sinfi7>0) fi7=180/M_PI*acos(cosfi7);
if(cosfi7<0 && sinfi7<0) fi7=180+fabs(180/M_PI*asin(sinfi7));
if(cosfi7>0 && sinfi7<0) fi7=360-180/M_PI*acos(cosfi7);
cosfi6=(O3C*cosfi7-(Xb-Xo3))/BC;
sinfi6=(O3C*sinfi7-(Yb-Yo3))/BC;
if(cosfi6>=0 && sinfi6>=0) fi6=180/M_PI*acos(cosfi6);
if(cosfi6<0 && sinfi6>0) fi6=180/M_PI*acos(cosfi6);
if(cosfi6<0 && sinfi6<0) fi6=180+fabs(180/M_PI*asin(sinfi6));
if(cosfi6>0 && sinfi6<0) fi6=360-180/M_PI*acos(cosfi6);
Xc=Xo3+O3C*cosfi7;
Yc=Yo3+O3C*sinfi7;
Xe=Xo3+O3E*(cosfi7*cos(gam1*RAD)-sinfi7*sin(gam1*RAD));
Ye=Yo3+O3E*(sinfi7*cos(gam1*RAD)+sin(gam1*RAD)*cosfi7);
A4=pow(Xe-Xm,2)+pow(Ye-Ym,2)+MN*MN-EN*EN;
B4=2*(Xe-Xm)*MN;
C4=2*(Ye-Ym)*MN;
cosfi9=(A4*B4-C4*sqrt(B4*B4+C4*C4-A4*A4))/(B4*B4+C4*C4);
sinfi9=(A4*C4+B4*sqrt(B4*B4+C4*C4-A4*A4))/(B4*B4+C4*C4);
if(cosfi9>=0 && sinfi9>=0) fi9=180/M_PI*acos(cosfi9);
if(cosfi9<0 && sinfi9>0) fi9=180/M_PI*acos(cosfi9);
if(cosfi9<0 && sinfi9<0) fi9=180+fabs(180/M_PI*asin(sinfi9));
if(cosfi9>0 && sinfi9<0) fi9=360-180/M_PI*acos(cosfi9);
cosfi8=(MN*cosfi9-(Xe-Xm))/EN;
sinfi8=(MN*sinfi9-(Ye-Ym))/EN;
if(cosfi8>=0 && sinfi8>=0) fi8=180/M_PI*acos(cosfi8);
if(cosfi8<0 && sinfi8>0) fi8=180/M_PI*acos(cosfi8);
if(cosfi8<0 && sinfi8<0) fi8=180+fabs(180/M_PI*asin(sinfi8));
if(cosfi8>0 && sinfi8<0) fi8=360-180/M_PI*acos(cosfi8);
Xn=Xe+EN*cosfi8;
Yn=Ye+EN*sinfi8;
Xp=Xe+EP*(cosfi8*EP/EN-sinfi8*PN/EN);
Yp=Ye+EP*(sinfi8*EP/EN+cosfi8*PN/EN);
Xz=Xe+xq*(cosfi8*EP/EN-sinfi8*PN/EN);
Yz=Ye+xq*(sinfi8*EP/EN+cosfi8*PN/EN);
Xq=Xz+yq*((cosfi8*EP/EN-sinfi8*PN/EN)*cos(pi/2)-sin(pi/2)*(sinfi8*EP/EN+cosfi8*PN/EN));
Yq=Yz+yq*((sinfi8*EP/EN+cosfi8*PN/EN)*cos(pi/2)+sin(pi/2)*(cosfi8*EP/EN-sinfi8*PN/EN));
A5=pow(Xc-Xo6,2)+pow(Yc-Yo6,2)+O6R*O6R-CR*CR;
B5=2*(Xc-Xo6)*O6R;
C5=2*(Yc-Yo6)*O6R;
cosfi11=(A5*B5-C5*sqrt(B5*B5+C5*C5-A5*A5))/(B5*B5+C5*C5);
sinfi11=(A5*C5+B5*sqrt(B5*B5+C5*C5-A5*A5))/(B5*B5+C5*C5);
if(cosfi11>=0 && sinfi11>=0) fi11=180/M_PI*acos(cosfi11);
if(cosfi11<0 && sinfi11>0) fi11=180/M_PI*acos(cosfi11);
if(cosfi11<0 && sinfi11<0) fi11=180+fabs(180/M_PI*asin(sinfi11));
if(cosfi11>0 && sinfi11<0) fi11=360-180/M_PI*acos(cosfi11);
cosfi10=(O6R*cosfi11-(Xc-Xo6))/CR;
sinfi10=(O6R*sinfi11-(Yc-Yo6))/CR;
if(cosfi10>=0 && sinfi10>=0) fi10=180/M_PI*acos(cosfi10);
if(cosfi10<0 && sinfi10>0) fi10=180/M_PI*acos(cosfi10);
if(cosfi10<0 && sinfi10<0) fi10=180+fabs(180/M_PI*asin(sinfi10));
if(cosfi10>0 && sinfi10<0) fi10=360-180/M_PI*acos(cosfi10);
Xr=Xc+CR*cosfi10;
Yr=Yc+CR*sinfi10;
Xs=Xo6+O6S*(cosfi11*cos(gam4*RAD)-sinfi11*sin(gam4*RAD));
Ys=Yo6+O6S*(sinfi11*cos(gam4*RAD)+sin(gam4*RAD)*cosfi11);
A6=pow(Xs-Xo8,2)+pow(Ys-Yo8,2)+O8V*O8V-SV*SV;
B6=2*(Xs-Xo8)*O8V;
C6=2*(Ys-Yo8)*O8V;
cosfi13=(A6*B6-C6*sqrt(B6*B6+C6*C6-A6*A6))/(B6*B6+C6*C6);
sinfi13=(A6*C6+B6*sqrt(B6*B6+C6*C6-A6*A6))/(B6*B6+C6*C6);
if(cosfi13>=0 && sinfi13>=0) fi13=180/M_PI*acos(cosfi13);
if(cosfi13<0 && sinfi13>0) fi13=180/M_PI*acos(cosfi13);
if(cosfi13<0 && sinfi13<0) fi13=180+fabs(180/M_PI*asin(sinfi13));
if(cosfi13>0 && sinfi13<0) fi13=360-180/M_PI*acos(cosfi13);
cosfi12=(O8V*cosfi13-(Xs-Xo8))/SV;
sinfi12=(O8V*sinfi13-(Ys-Yo8))/SV;
if(cosfi12>=0 && sinfi12>=0) fi12=180/M_PI*acos(cosfi12);
if(cosfi12<0 && sinfi12>0) fi12=180/M_PI*acos(cosfi12);
if(cosfi12<0 && sinfi12<0) fi12=180+fabs(180/M_PI*asin(sinfi12));
if(cosfi12>0 && sinfi12<0) fi12=360-180/M_PI*acos(cosfi12);
Xv=Xs+SV*cosfi12;
Yv=Ys+SV*sinfi12;
Xw=Xo8-O8W*cosfi13;
Yw=Yo8-O8W*sinfi13;
A7=pow(Xa2-Xo7,2)+pow(Ya2-Yo7,2)+O7H*O7H-A2H*A2H;
B7=2*(Xa2-Xo7)*O7H;
C7=2*(Ya2-Yo7)*O7H;
cosfi15=(A7*B7-C7*sqrt(B7*B7+C7*C7-A7*A7))/(B7*B7+C7*C7);
sinfi15=(A7*C7+B7*sqrt(B7*B7+C7*C7-A7*A7))/(B7*B7+C7*C7);
if(cosfi15>=0 && sinfi15>=0) fi15=180/M_PI*acos(cosfi15);
if(cosfi15<0 && sinfi15>0) fi15=180/M_PI*acos(cosfi15);
if(cosfi15<0 && sinfi15<0) fi15=180+fabs(180/M_PI*asin(sinfi15));
if(cosfi15>0 && sinfi15<0) fi15=360-180/M_PI*acos(cosfi15);
cosfi14=(O7H*cosfi15-(Xa2-Xo7))/A2H;
sinfi14=(O7H*sinfi15-(Ya2-Yo7))/A2H;
if(cosfi14>=0 && sinfi14>=0) fi14=180/M_PI*acos(cosfi14);
if(cosfi14<0 && sinfi14>0) fi14=180/M_PI*acos(cosfi14);
if(cosfi14<0 && sinfi14<0) fi14=180+fabs(180/M_PI*asin(sinfi14));
if(cosfi14>0 && sinfi14<0) fi14=360-180/M_PI*acos(cosfi14);
Xh=Xa2+A2H*cosfi14;
Yh=Ya2+A2H*sinfi14;
Xi=Xo7-O7I*cosfi15;
Yi=Yo7-O7I*sinfi15;
A8=pow(Xw-Xx,2)+pow(Yw-Yx,2)+LX*LX-WL*WL;
B8=2*(Xw-Xx)*LX;
C8=2*(Yw-Yx)*LX;
cosfi17=(A8*B8-C8*sqrt(B8*B8+C8*C8-A8*A8))/(B8*B8+C8*C8);
sinfi17=(A8*C8+B8*sqrt(B8*B8+C8*C8-A8*A8))/(B8*B8+C8*C8);
if(cosfi17>=0 && sinfi17>=0) fi17=180/M_PI*acos(cosfi17);
if(cosfi17<0 && sinfi17>0) fi17=180/M_PI*acos(cosfi17);
if(cosfi17<0 && sinfi17<0) fi17=180+fabs(180/M_PI*asin(sinfi17));
if(cosfi17>0 && sinfi17<0) fi17=360-180/M_PI*acos(cosfi17);
cosfi16=(LX*cosfi17-(Xw-Xx))/WL;
sinfi16=(LX*sinfi17-(Yw-Yx))/WL;
if(cosfi16>=0 && sinfi16>=0) fi16=180/M_PI*acos(cosfi16);
if(cosfi16<0 && sinfi16>0) fi16=180/M_PI*acos(cosfi16);
if(cosfi16<0 && sinfi16<0) fi16=180+fabs(180/M_PI*asin(sinfi16));
if(cosfi16>0 && sinfi16<0) fi16=360-180/M_PI*acos(cosfi16);
Xl=Xw+WL*cosfi16;
Yl=Yw+WL*sinfi16;
A9=pow(Xi-Xu,2)+pow(Yi-Yu,2)+JU*JU-IJ*IJ;
B9=2*(Xi-Xu)*JU;
C9=2*(Yi-Yu)*JU;
cosfi19=(A9*B9+C9*sqrt(B9*B9+C9*C9-A9*A9))/(B9*B9+C9*C9);
sinfi19=(A9*C9-B9*sqrt(B9*B9+C9*C9-A9*A9))/(B9*B9+C9*C9);
if(cosfi19>=0 && sinfi19>=0) fi19=180/M_PI*acos(cosfi19);
if(cosfi19<0 && sinfi19>0) fi19=180/M_PI*acos(cosfi19);
if(cosfi19<0 && sinfi19<0) fi19=180+fabs(180/M_PI*asin(sinfi19));
if(cosfi19>0 && sinfi19<0) fi19=360-180/M_PI*acos(cosfi19);
cosfi18=(JU*cosfi19-(Xi-Xu))/IJ;
sinfi18=(JU*sinfi19-(Yi-Yu))/IJ;
if(cosfi18>=0 && sinfi18>=0) fi18=180/M_PI*acos(cosfi18);
if(cosfi18<0 && sinfi18>0) fi18=180/M_PI*acos(cosfi18);
if(cosfi18<0 && sinfi18<0) fi18=180+fabs(180/M_PI*asin(sinfi18));
if(cosfi18>0 && sinfi18<0) fi18=360-180/M_PI*acos(cosfi18);
Xj=Xi+IJ*cosfi18;
Yj=Yi+IJ*sinfi18;
Xy=Xu+UY*(cosfi19*cos(gam5*RAD)-sinfi19*sin(gam5*RAD));
Yy=Yu+UY*(sinfi19*cos(gam5*RAD)+sin(gam5*RAD)*cosfi19);
q=sqrt(pow(Xl-Xy,2)+pow(Yl-Yy,2));
L1y=sqrt(q*q-LL1*LL1);
A10=LL1;
B10=L1y;
C10=Yl-Yy;
sinfi20=(-B10*C10-A10*sqrt(A10*A10+B10*B10-C10*C10))/(A10*A10+B10*B10);
cosfi20=(-A10*C10+B10*sqrt(A10*A10+B10*B10-C10*C10))/(A10*A10+B10*B10);
if(cosfi20>=0 && sinfi20>=0) fi20=180/M_PI*acos(cosfi20);
if(cosfi20<0 && sinfi20>0) fi20=180/M_PI*acos(cosfi20);
if(cosfi20<0 && sinfi20<0) fi20=180+fabs(180/M_PI*asin(sinfi20));
if(cosfi20>0 && sinfi20<0) fi20=360-180/M_PI*acos(cosfi20);
Xl1=Xl+LL1*cos((fi20+QQ)*RAD);
Yl1=Yl+LL1*sin((fi20+QQ)*RAD);
Xzb=Xl1+L1zb*cos(fi20*RAD);
Yzb=Yl1+L1zb*sin(fi20*RAD);
Xqb=Xzb+ZQb*cos((fi20-QQ)*RAD);
Yqb=Yzb+ZQb*sin((fi20-QQ)*RAD);
RRR=sqrt(pow(Xl-Xqb,2)+pow(Yl-Yqb,2));
return;
}
void elips()
{
float fi;
for(fi=0;fi<=360;fi++)
{
raschet(fi);
putpixel(n*Xq+Xo1,DEK*(n*(-Yq)+Yo1),4);
putpixel(n*Xqb+Xo1,DEK*(n*(-Yqb)+Yo1),4);
}
return;
}
void draw(float fi)
{
/*Стойки*/
stoyka(Xo1,Yo1);
stoyka(n*Xo2+Xo1,n*(-Yo2)+Yo1);
stoyka(n*Xo3+Xo1,n*(-Yo3)+Yo1);
stoyka(n*Xo4+Xo1,n*(-Yo4)+Yo1);
stoyka(n*Xd+Xo1,n*(-Yd)+Yo1);
stoyka(n*Xo6+Xo1,n*(-Yo6)+Yo1);
stoyka(n*Xo8+Xo1,n*(-Yo8)+Yo1);
stoyka(n*Xo5+Xo1,n*(-Yo5)+Yo1);
stoyka(n*Xo7+Xo1,n*(-Yo7)+Yo1);
/*Звенья*/
setlinestyle(0,1,3);
setcolor(1);
line(Xo1,DEK*Yo1,n*Xa1+Xo1,DEK*(n*(-Ya1)+Yo1));
line(Xo1,DEK*Yo1,n*Xf+Xo1,DEK*(n*(-Yf)+Yo1));
line(n*Xo4+Xo1,DEK*(n*(-Yo4)+Yo1),n*Xk+Xo1,DEK*(n*(-Yk)+Yo1));
line(n*Xf+Xo1,DEK*(n*(-Yf)+Yo1),n*Xk+Xo1,DEK*(n*(-Yk)+Yo1));
line(n*Xm+Xo1,DEK*(n*(-Ym)+Yo1),n*Xk+Xo1,DEK*(n*(-Yk)+Yo1));
line(n*Xo4+Xo1,DEK*(n*(-Yo4)+Yo1),n*Xm+Xo1,DEK*(n*(-Ym)+Yo1));
line(n*Xd+Xo1,DEK*(n*(-Yd)+Yo1),n*Xb+Xo1,DEK*(n*(-Yb)+Yo1));
line(n*Xa1+Xo1,DEK*(n*(-Ya1)+Yo1),n*Xb+Xo1,DEK*(n*(-Yb)+Yo1));
line(n*Xc+Xo1,DEK*(n*(-Yc)+Yo1),n*Xb+Xo1,DEK*(n*(-Yb)+Yo1));
line(n*Xc+Xo1,DEK*(n*(-Yc)+Yo1),n*Xo3+Xo1,DEK*(n*(-Yo3)+Yo1));
line(n*Xo2+Xo1,DEK*(n*(-Yo2)+Yo1),n*Xd+Xo1,DEK*(n*(-Yd)+Yo1));
line(n*Xe+Xo1,DEK*(n*(-Ye)+Yo1),n*Xc+Xo1,DEK*(n*(-Yc)+Yo1));
line(n*Xo3+Xo1,DEK*(n*(-Yo3)+Yo1),n*Xe+Xo1,DEK*(n*(-Ye)+Yo1));
line(n*Xe+Xo1,DEK*(n*(-Ye)+Yo1),n*Xn+Xo1,DEK*(n*(-Yn)+Yo1));
line(n*Xn+Xo1,DEK*(n*(-Yn)+Yo1),n*Xm+Xo1,DEK*(n*(-Ym)+Yo1));
line(n*Xe+Xo1,DEK*(n*(-Ye)+Yo1),n*Xp+Xo1,DEK*(n*(-Yp)+Yo1));
line(n*Xn+Xo1,DEK*(n*(-Yn)+Yo1),n*Xp+Xo1,DEK*(n*(-Yp)+Yo1));
line(n*Xz+Xo1,DEK*(n*(-Yz)+Yo1),n*Xq+Xo1,DEK*(n*(-Yq)+Yo1));
line(n*Xc+Xo1,DEK*(n*(-Yc)+Yo1),n*Xr+Xo1,DEK*(n*(-Yr)+Yo1));
line(n*Xr+Xo1,DEK*(n*(-Yr)+Yo1),n*Xo6+Xo1,DEK*(n*(-Yo6)+Yo1));
line(n*Xs+Xo1,DEK*(n*(-Ys)+Yo1),n*Xo6+Xo1,DEK*(n*(-Yo6)+Yo1));
line(n*Xr+Xo1,DEK*(n*(-Yr)+Yo1),n*Xs+Xo1,DEK*(n*(-Ys)+Yo1));
line(n*Xs+Xo1,DEK*(n*(-Ys)+Yo1),n*Xv+Xo1,DEK*(n*(-Yv)+Yo1));
line(n*Xv+Xo1,DEK*(n*(-Yv)+Yo1),n*Xo8+Xo1,DEK*(n*(-Yo8)+Yo1));
line(n*Xw+Xo1,DEK*(n*(-Yw)+Yo1),n*Xo8+Xo1,DEK*(n*(-Yo8)+Yo1));
line(n*Xo5+Xo1,DEK*(n*(-Yo5)+Yo1),n*Xa2+Xo1,DEK*(n*(-Ya2)+Yo1));
line(n*Xh+Xo1,DEK*(n*(-Yh)+Yo1),n*Xa2+Xo1,DEK*(n*(-Ya2)+Yo1));
line(n*Xh+Xo1,DEK*(n*(-Yh)+Yo1),n*Xo7+Xo1,DEK*(n*(-Yo7)+Yo1));
line(n*Xo7+Xo1,DEK*(n*(-Yo7)+Yo1),n*Xi+Xo1,DEK*(n*(-Yi)+Yo1));
line(n*Xw+Xo1,DEK*(n*(-Yw)+Yo1),n*Xl+Xo1,DEK*(n*(-Yl)+Yo1));
line(n*Xl+Xo1,DEK*(n*(-Yl)+Yo1),n*Xx+Xo1,DEK*(n*(-Yx)+Yo1));
line(n*Xx+Xo1,DEK*(n*(-Yx)+Yo1),n*Xu+Xo1,DEK*(n*(-Yu)+Yo1));
line(n*Xi+Xo1,DEK*(n*(-Yi)+Yo1),n*Xj+Xo1,DEK*(n*(-Yj)+Yo1));
line(n*Xj+Xo1,DEK*(n*(-Yj)+Yo1),n*Xu+Xo1,DEK*(n*(-Yu)+Yo1));
line(n*Xx+Xo1,DEK*(n*(-Yx)+Yo1),n*(Xx+16)+Xo1,DEK*(n*(-Yx)+Yo1));
line(n*Xu+Xo1,DEK*(n*(-Yu)+Yo1),n*Xy+Xo1,DEK*(n*(-Yy)+Yo1));
line(n*Xj+Xo1,DEK*(n*(-Yj)+Yo1),n*Xy+Xo1,DEK*(n*(-Yy)+Yo1));
//line(n*Xl+Xo1,DEK*(n*(-Yl)+Yo1),n*Xzb+Xo1,DEK*(n*(-Yzb)+Yo1));
line(n*Xzb+Xo1,DEK*(n*(-Yzb)+Yo1),n*Xqb+Xo1,DEK*(n*(-Yqb)+Yo1));
line(n*Xl+Xo1,DEK*(n*(-Yl)+Yo1),n*Xl1+Xo1,DEK*(n*(-Yl1)+Yo1));
line(n*Xl1+Xo1,DEK*(n*(-Yl1)+Yo1),n*Xzb+Xo1,DEK*(n*(-Yzb)+Yo1));
setlinestyle(0,0,1);
setcolor(4);
line(50,DEK*(n*(-Ystola)+Yo1),450,DEK*(n*(-Ystola)+Yo1));
line(50,DEK*(n*(-Ystola-2.5)+Yo1),450,DEK*(n*(-Ystola-2.5)+Yo1));
line(50,DEK*(n*(-Ystola-3.5)+Yo1),450,DEK*(n*(-Ystola-3.5)+Yo1));
line(Xo1,DEK*(n*(-0)+Yo1),Xo1,DEK*(n*(-Ystola-40)+Yo1));
polzushka(n*Xy+Xo1,n*(-Yy)+Yo1,-fi20);
setlinestyle(0,0,3);
arc(Xo1,DEK*Yo1,fi+gam3,fi,6);
arc(Xo1+n*Xo8,DEK*(n*(-Yo8)+Yo1),fi13+180,fi13,8);
arc(Xo1+n*Xo7,DEK*(n*(-Yo7)+Yo1),fi15+180,fi15,8);
arc(Xo1+n*Xu,DEK*(n*(-Yu)+Yo1),fi19,fi19+gam5,7);
arc(Xo1+n*Xx,DEK*(n*(-Yx)+Yo1),0,240,7);
setlinestyle(0,0,1);
setfillstyle(1,3);
setcolor(1);
fillellipse(Xo1,DEK*Yo1,R_C,R_C);
fillellipse(Xo1+Xo3*n,DEK*(Yo1-Yo3*n),R_C,R_C);
fillellipse(Xo1+Xo4*n,DEK*(Yo1-Yo4*n),R_C,R_C);
fillellipse(Xo1+Xo2*n,DEK*(Yo1-Yo2*n),R_C,R_C);
fillellipse(Xo1+Xo6*n,DEK*(Yo1-Yo6*n),R_C,R_C);
fillellipse(Xo1+Xo7*n,DEK*(Yo1-Yo7*n),R_C,R_C);
fillellipse(Xo1+Xo5*n,DEK*(Yo1-Yo5*n),R_C,R_C);
fillellipse(Xo1+Xo8*n,DEK*(Yo1-Yo8*n),R_C,R_C);
fillellipse(n*Xa1+Xo1,DEK*(n*(-Ya1)+Yo1),R_C,R_C);
fillellipse(n*Xa2+Xo1,DEK*(n*(-Ya2)+Yo1),R_C,R_C);
fillellipse(n*Xh+Xo1,DEK*(n*(-Yh)+Yo1),R_C,R_C);
fillellipse(n*Xl+Xo1,DEK*(n*(-Yl)+Yo1),R_C,R_C);
fillellipse(n*Xf+Xo1,DEK*(n*(-Yf)+Yo1),R_C,R_C);
fillellipse(n*Xr+Xo1,DEK*(n*(-Yr)+Yo1),R_C,R_C);
fillellipse(n*Xs+Xo1,DEK*(n*(-Ys)+Yo1),R_C,R_C);
fillellipse(n*Xk+Xo1,DEK*(n*(-Yk)+Yo1),R_C,R_C);
fillellipse(n*Xm+Xo1,DEK*(n*(-Ym)+Yo1),R_C,R_C);
fillellipse(n*Xd+Xo1,DEK*(n*(-Yd)+Yo1),R_C,R_C);
fillellipse(n*Xb+Xo1,DEK*(n*(-Yb)+Yo1),R_C,R_C);
fillellipse(n*Xc+Xo1,DEK*(n*(-Yc)+Yo1),R_C,R_C);
fillellipse(n*Xe+Xo1,DEK*(n*(-Ye)+Yo1),R_C,R_C);
fillellipse(n*Xn+Xo1,DEK*(n*(-Yn)+Yo1),R_C,R_C);
fillellipse(n*Xp+Xo1,DEK*(n*(-Yp)+Yo1),R_C,R_C);
fillellipse(n*Xv+Xo1,DEK*(n*(-Yv)+Yo1),R_C,R_C);
fillellipse(n*Xw+Xo1,DEK*(n*(-Yw)+Yo1),R_C,R_C);
fillellipse(n*Xi+Xo1,DEK*(n*(-Yi)+Yo1),R_C,R_C);
fillellipse(n*Xx+Xo1,DEK*(n*(-Yx)+Yo1),R_C,R_C);
fillellipse(n*Xu+Xo1,DEK*(n*(-Yu)+Yo1),R_C,R_C);
fillellipse(n*Xj+Xo1,DEK*(n*(-Yj)+Yo1),R_C,R_C);
fillellipse(n*Xy+Xo1,DEK*(n*(-Yy)+Yo1),R_C,R_C);
/*Текст*/
setcolor(14);
outtextxy(Xo1,DEK*Yo1+20,"O1");
outtextxy(Xo1+Xo3*n,DEK*(Yo1-Yo3*n)+20,"O3");
outtextxy(Xo1+Xo4*n-35,DEK*(Yo1-Yo4*n)+10,"O4");
outtextxy(Xo1+Xo6*n-5,DEK*(Yo1-Yo6*n)-17,"O6");
outtextxy(Xo1+Xo8*n+15,DEK*(Yo1-Yo8*n)-7,"O8");
outtextxy(Xo1+Xo7*n+15,DEK*(Yo1-Yo7*n)-7,"O7");
outtextxy(Xo1+Xo5*n+15,DEK*(Yo1-Yo5*n)-7,"O5");
outtextxy(Xo1+Xo2*n,DEK*(Yo1-Yo2*n)+20,"O2");
outtextxy(n*Xa1+Xo1-5,DEK*(n*(-Ya1)+Yo1-15),"A1");
outtextxy(n*Xa2+Xo1-5,DEK*(n*(-Ya2)+Yo1-15),"A2");
outtextxy(n*Xh+Xo1-5,DEK*(n*(-Yh)+Yo1-15),"H");
outtextxy(n*Xi+Xo1-5,DEK*(n*(-Yi)+Yo1-15),"I");
outtextxy(n*Xf+Xo1+5,DEK*(n*(-Yf)+Yo1-15),"F");
outtextxy(n*Xk+Xo1-3,DEK*(n*(-Yk)+Yo1+10),"K");
outtextxy(n*Xm+Xo1-15,DEK*(n*(-Ym)+Yo1),"M");
outtextxy(n*Xd+Xo1-15,DEK*(n*(-Yd)+Yo1+5),"D");
outtextxy(n*Xb+Xo1-3,DEK*(n*(-Yb)+Yo1+10),"B");
outtextxy(n*Xc+Xo1+10,DEK*(n*(-Yc)+Yo1-10),"C");
outtextxy(n*Xe+Xo1,DEK*(n*(-Ye)+Yo1-17),"E");
outtextxy(n*Xn+Xo1-3,DEK*(n*(-Yn)+Yo1+10),"N");
outtextxy(n*Xp+Xo1,DEK*(n*(-Yp)+Yo1-17),"P");
outtextxy(n*Xs+Xo1-7,DEK*(n*(-Ys)+Yo1-17),"S");
outtextxy(n*Xr+Xo1,DEK*(n*(-Yr)+Yo1-17),"R");
outtextxy(n*Xv+Xo1,DEK*(n*(-Yv)+Yo1-17),"V");
outtextxy(n*Xw+Xo1,DEK*(n*(-Yw)+Yo1-17),"W");
outtextxy(n*Xl+Xo1,DEK*(n*(-Yl)+Yo1-17),"L");
outtextxy(n*Xx+Xo1,DEK*(n*(-Yx)+Yo1-17),"X");
outtextxy(n*Xu+Xo1,DEK*(n*(-Yu)+Yo1-17),"U");
outtextxy(n*Xj+Xo1,DEK*(n*(-Yj)+Yo1-17),"J");
outtextxy(n*Xy+Xo1,DEK*(n*(-Yy)+Yo1-17),"Y");
return;
}
void stoyka(float X, float Y)
{
setlinestyle(0,0,3);
setfillstyle(1,3);
setcolor(4);
line(X,DEK*Y,X+5,DEK*Y+10);
line(X,DEK*Y,X-5,DEK*Y+10);
line(X-10,DEK*Y+10,X+10,DEK*Y+10);
setlinestyle(0,0,1);
//fillellipse(X,DEK*Y,R_C,R_C);
line(X-5,DEK*Y+10,X-9,DEK*Y+14);
line(X,DEK*Y+10,X-4,DEK*Y+14);
line(X+5,DEK*Y+10,X+1,DEK*Y+14);
line(X+10,DEK*Y+10,X+6,DEK*Y+14);
return;
}
void polzushka(float X, float Y, float fi)
{
setlinestyle(0,0,3);
setfillstyle(1,3);
setcolor(1);
line(X+15*cos((fi+30)*RAD),DEK*(Y+15*sin((fi+30)*RAD)),X+15*cos((fi+150)*RAD),DEK*(Y+15*sin((fi+150)*RAD)));
line(X+15*cos((fi+210)*RAD),DEK*(Y+15*sin((fi+210)*RAD)),X+15*cos((fi+330)*RAD),DEK*(Y+15*sin((fi+330)*RAD)));
line(X+15*cos((fi+30)*RAD),DEK*(Y+15*sin((fi+30)*RAD)),X+15*cos((fi+330)*RAD),DEK*(Y+15*sin((fi+330)*RAD)));
line(X+15*cos((fi+210)*RAD),DEK*(Y+15*sin((fi+210)*RAD)),X+15*cos((fi+150)*RAD),DEK*(Y+15*sin((fi+150)*RAD)));
setlinestyle(0,0,1);
//fillellipse(X,DEK*Y,R_C,R_C);
return;
}
void okno(float x1,float y1,float x2,float y2)
{
setfillstyle(1,7);
setlinestyle(0,1,1);
bar(x1+2,y1+2,x2-2,y2-2);
setcolor(15);
line(x1,y1,x2,y1);
line(x1,y1,x1,y2);
line(x1+1,y1+1,x1+1,y2-1);
line(x1+1,y1+1,x2-1,y1+1);
setcolor(8);
line(x2-1,y1+1,x2-1,y2-1);
line(x1+1,y2-1,x2-1,y2-1);
setcolor(0);
line(x1,y2,x2,y2);
line(x2,y1,x2,y2);
return;
}
void ramka(float x1,float y1,float x2,float y2)
{
setlinestyle(0,1,1);
setcolor(15);
line(x1,y1,x2,y1);
line(x1,y1,x1,y2);
line(x1+1,y1+1,x1+1,y2-1);
line(x1+1,y1+1,x2-1,y1+1);
setcolor(8);
line(x2-1,y1+1,x2-1,y2-1);
line(x1+1,y2-1,x2-1,y2-1);
setcolor(0);
line(x1,y2,x2,y2);
line(x2,y1,x2,y2);
return;
}
void help()
{
char text[]="Машина 131 ряда";
int key;
setfillstyle(1,8);
bar(0,0,640,350);
okno(140,50,500,300);
setcolor(1);
outtextxy(150,60,text);
do
{
key=bioskey(1);
if(key==0x11b) break;
if(key!=0) {key=0;getch();}
}
while(key!=0x11b);
return;
}
void grafiki()
{
int key,x_x=0,fi,t=1;
setgraphmode(2);
setfillstyle(1,8);
bar(0,0,640,480);
okno(X-280,DEK*(Y-200),X+235,DEK*(Y+450));
osi(45,430,475,400,1);
setcolor(14);
outtextxy(640,20,"Вывод графика:");
outtextxy(640,450,"<ESCAPE>-Выход");
grafik(1);
do
{
key=bioskey(1);
if(key!=0 && x_x==0) {x_x=1;getch();}
if(key==0x4b00 && t>1) {t--;getch();}
if(key==0x4d00 && t<19) {t++;getch();}
if(key!=0) grafik(t);
if(key==0x11b) break;
if(key!=0) {key=0;getch();}
if(fi>=360) fi=0;
}
while(1==1);
getch();
setgraphmode(1);
return;
}
void osi(float x, float y, float l_x, float l_y, int color)
{
int i;
char buffer [80];
setcolor(color);
line(x,y,x+l_x,y);
line(x,y,x,y-l_y);
line(x,y-l_y,x-2,y-l_y+10);
line(x,y-l_y,x+2,y-l_y+10);
line(x+l_x,y,x+l_x-10,y+2);
line(x+l_x,y,x+l_x-10,y-2);
for(i=10;i<=360;i+=10)
{
setcolor(6);
line(x+i*1.2,y-l_y+40,x+i*1.2,y+1);
line(x-1,y-i,x+l_x-45,y-i);
setcolor(0);
sprintf(buffer,"%d",i);
settextstyle(0,0,0);
settextjustify(2,1);
outtextxy(x-2,y-i+1,buffer);
settextstyle(0,1,0);
settextjustify(1,2);
outtextxy(x+i*1.2,y+3,buffer);
}
settextstyle(0,0,0);
settextjustify(2,1);
return;
}
void grafik(int sign)
{
float i;
okno(X-280,DEK*(Y-200),X+235,DEK*(Y+450));
osi(45,430,475,400,1);
if(sign==1)outtextxy(44,45,"fi2");
if(sign==2)outtextxy(44,45,"fi3");
if(sign==3)outtextxy(44,45,"fi4");
if(sign==4)outtextxy(44,45,"fi5");
if(sign==5)outtextxy(44,45,"fi6");
if(sign==6)outtextxy(44,45,"fi7");
if(sign==7)outtextxy(44,45,"fi8");
if(sign==8)outtextxy(44,45,"fi9");
if(sign==9)outtextxy(44,45,"fi10");
if(sign==10)outtextxy(44,45,"fi11");
if(sign==11)outtextxy(44,45,"fi12");
if(sign==12)outtextxy(44,45,"fi13");
if(sign==13)outtextxy(44,45,"fi14");
if(sign==14)outtextxy(44,45,"fi15");
if(sign==15)outtextxy(44,45,"fi16");
if(sign==16)outtextxy(44,45,"fi17");
if(sign==17)outtextxy(44,45,"fi18");
if(sign==18)outtextxy(44,45,"fi19");
if(sign==19)outtextxy(44,45,"fi20");
outtextxy(510,440,"fi");
for(i=0;i<=360;i++)
{
raschet(i);
if(sign==1)putpixel(45+i*1.2,430-fi2,0);
if(sign==2)putpixel(45+i*1.2,430-fi3,0);
if(sign==3)putpixel(45+i*1.2,430-fi4,0);
if(sign==4)putpixel(45+i*1.2,430-fi5,0);
if(sign==5)putpixel(45+i*1.2,430-fi6,0);
if(sign==6)putpixel(45+i*1.2,430-fi7,0);
if(sign==7)putpixel(45+i*1.2,430-fi8,0);
if(sign==8)putpixel(45+i*1.2,430-fi9,0);
if(sign==9)putpixel(45+i*1.2,430-fi10,0);
if(sign==10)putpixel(45+i*1.2,430-fi11,0);
if(sign==11)putpixel(45+i*1.2,430-fi12,0);
if(sign==12)putpixel(45+i*1.2,430-fi13,0);
if(sign==13)putpixel(45+i*1.2,430-fi14,0);
if(sign==14)putpixel(45+i*1.2,430-fi15,0);
if(sign==15)putpixel(45+i*1.2,430-fi16,0);
if(sign==16)putpixel(45+i*1.2,430-fi17,0);
if(sign==17)putpixel(45+i*1.2,430-fi18,0);
if(sign==18)putpixel(45+i*1.2,430-fi19,0);
if(sign==19)putpixel(45+i*1.2,430-fi20,0);
}
return;
}
Похожие работы
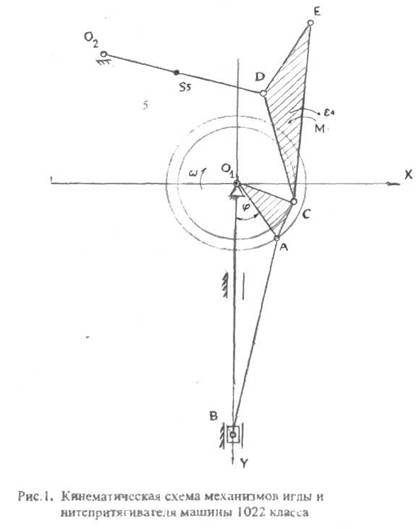
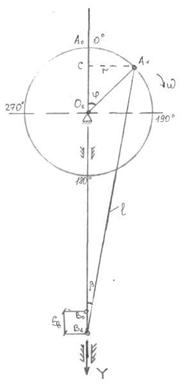
... исполнительных органов. Кинематическая схема может быть плоской или пространственной (в ортогональном или аксонометрическом изображении). На рис. I представлена плоская кинематическая схема механизмов иглы и нитепритягивателя универсальной швейной машины 1022 класса. На рис. 2 - пространственная конструктивно-кинематическая схема. Машина 1022 класса предназначена для стачивания деталей ...
... нарушаются элементарные дидактические требования, преобладает пассивное восприятие учебной информации учащимися, нерационально тратится учебное время. Глава 2. Методика использования аудиовизуальных и технических средств обучения при изучении раздела «Технология обработки ткани 5 класс» 2.1 Комплексно-методическое обеспечение раздела 1. Учебно-методическая документация № п/п Наименование ...


... , расстоянием между иглами и др. Общая классификация рядов приведена в таблице 5. Таблица 5 Классификация рядов машин МО-6 3. Основные принципы совершенствования швейных машин За последние несколько десятилетий специалисты, работающие в химической промышленности, металлургии, предложили практическому машиностроению большое количество новых полимерных и композитных материалов, новых ...
... , хранении, употреблении, к огне- и взрывоопасное, к срокам периодического осмотра, контроля, переконсервации и т.п. ЛЕКЦИЯ 4 План лекции: 4.1. Организация процесса проектирования-конструирования и освоения технологического оборудования 4.2. Стадии и этапы разработки конструкторской документации 4.1. Организация процесса проектирования-конструирования и освоения технологического ...
0 комментариев