Назначение
Подсистема
измерения
технологических
параметров
Подсистема
автоматики
безопасности
Гидропривод
торцового
ориентирования
Определение
параметров
насосной установки
Поверочный
расчет тепловых
режимов в ПСН
Требования
к проектируемой
системе управления
СПЕЦИАЛЬНАЯ
ЧАСТЬ
Разработка
средств сопряжения
с датчиками
Сопряжение
с датчиками
температуры
статоров
Сопряжение
с тахогенераторами
Навигация
Определение параметров насосной установки
Hазработка системы регулирования, контроля и регистрации потребления энергоносителей печью скоростного нагрева
80042
знака
8
таблиц
49
изображений
2.1.3 Определение параметров насосной установки
Исходя из анализа работы печи, делаем вывод, что одновременная работа трех гидравлических приводов (вращения валка, торцового ориентирования и подъема крышки) невозможна. Тогда необходимая подача на выходном патрубке насоса будет равна наибольшему из расходов гидроприводов (привода вращения валка, в котором установлены два гидромотора), а требуемое давление – наибольшему из требуемых давлений на исполнительных органах (гидродвигатели привода вращения валка):
QАМАХ=QБМАХ=5.2610-42=10,5210-4 (м3/с),
рАМАХ=рБМАХ=14.83106(Па),
где QБМАХ – наибольший из расходов приводов;
рБМАХ – наибольшее из давлений в приводах.
По значениям расхода и давления выбираем трехсекционный шестеренный насос типа НШ-63-63-50 с номинальным давлением рА=16 МПа и расходами по секциям (14.5-14.5-11.5) м3/с.
Определим необходимую мощность на валу насоса:
 (кВт),
(кВт),
где
![]() =0.86
– полный КПД
насоса.
=0.86
– полный КПД
насоса.
Выбираем приводной двигатель для насосной установки типа 2ЭДКОФ250М4У2.5 исполнения JM4001.
Одна секция насоса с расходом 14.510-4 м3/с работает на привод вращения валка, другая с расходом 14.510-4 м3/с работает на привод торцового ориентирования и третья – на привод подъема крышки печи (в данном проекте не расчитывался).
2.1.5 Динамический расчет гидроприводов
С
оставляем
расчетную
функциональную
схему гидропривода:
Рисунок 2.6 – Расчетная функциональная схема гидропривода
 - передаточная
функция генератора
тока управления,
- передаточная
функция генератора
тока управления,
kY = IВЫХ/UВХ = 0.85/10 = 0.085 (А/В) - коэффициент передачи генератора тока;
ТУ = 0.002 с - постоянная времени генератора тока.
Таким образом:
 .
.
 - передаточная
функция пропорционального
электромагнита,
- передаточная
функция пропорционального
электромагнита,
kПЭ = x0/IВЫХ = 1.610-3/0.85 = 1.8810-3 (м/А) - коэффициент передачи электромагнита;
ТЭ = LМАГН/RМАГН = 0.01c - постоянная времени электромагнита.
Таким образом:
 .
.
 -
передаточная
функция гидравлического
потенциометра
с обратной
связью,
-
передаточная
функция гидравлического
потенциометра
с обратной
связью,
 - коэффициент
передачи
потенциометра:
- коэффициент
передачи
потенциометра:
 =
538.08 (м2/c);
=
538.08 (м2/c);
kД = kPx0/pВХ = 538.0810-3/14.1106 = 0.0310-6 (м5/Нс);
 =
15.910-4
(м2);
=
15.910-4
(м2);
 =
64.05105
(Н/м);
=
64.05105
(Н/м);
тогда kП = 4.52;
 =
210-3
(с) -
постоянная
времени потенциометра;
=
210-3
(с) -
постоянная
времени потенциометра;
 - относительный
коэффициент
демпфирования
колебаний.
- относительный
коэффициент
демпфирования
колебаний.
Тогда:
 .
.
![]() - передаточная
функция основного
золотника.
- передаточная
функция основного
золотника.
Для привода вращения валка: k3 = QБ/L = 0.098;
для привода торцового ориентирования: k3 = QБ/L = 0.049.
 - передаточная
функция гидроцилиндра
и гидромотора.
- передаточная
функция гидроцилиндра
и гидромотора.
Для привода торцового ориентирования:
 =
26.31 (м-2)
- коэффициент
передачи
гидроцилиндра;
=
26.31 (м-2)
- коэффициент
передачи
гидроцилиндра;
 =
22.1103
(Н/м) - жесткость
гидроцилиндра;
=
22.1103
(Н/м) - жесткость
гидроцилиндра;
 =
1.23 (с) - постоянная
времени гидроцилиндра;
=
1.23 (с) - постоянная
времени гидроцилиндра;
 =
0.28 - относительный
коэффициент
демпфирования
колебаний;
=
0.28 - относительный
коэффициент
демпфирования
колебаний;
тогда:
 .
.
Для привода вращения валка аналогично:
 .
.
 - передаточная
функция звена
для получения
выходного
параметра -
скорости. Принимаем
дифференцирующее
звено с глубиной
дифференцирования
а=1 и постоянными
времени Т1=Т2=0.1:
- передаточная
функция звена
для получения
выходного
параметра -
скорости. Принимаем
дифференцирующее
звено с глубиной
дифференцирования
а=1 и постоянными
времени Т1=Т2=0.1:
 .
.
Т.к. в приводе последовательно включены два звена второго порядка, то в области высоких частот ЛАЧХ привода будет иметь наклон порядка -120 dB/дек, что неприемлемо для приводов (рисунок 2.7).
Желаемая ЛАЧХ для медленных приводов имеет вид - рисунок 2.8.
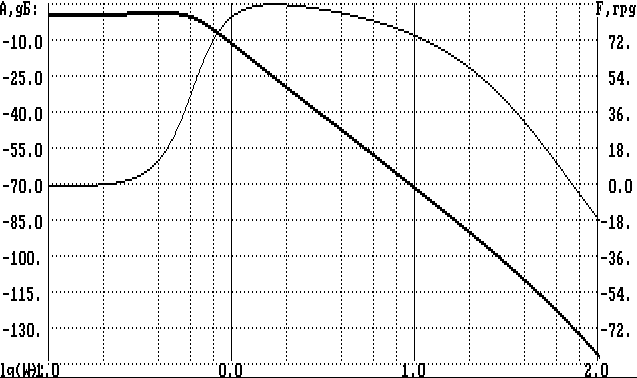
Рисунок 2.7 - ЛАЧХ и ЛФЧХ гидропривода без корректирующих звеньев
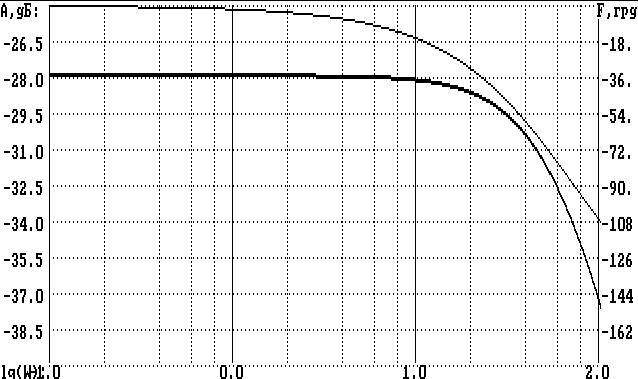
Рисунок 2.8 - Желаемые ЛАЧХ и ЛФЧХ гидропривода с корректирующими звеньями и обратной связью по скорости
Для получения наклона в области высоких частот порядка -40...-60 dB/дек необходимо включение корректирующих дифференцирующих звеньев (+20 dB/дек). Определение параметров корректирующих звеньев производим по методике [2] с помощью программы SIAM (рисунки 2.9, 2.10).

Рисунок 2.9 - ЛАЧХ и ЛФЧХ корректирующего звена №1
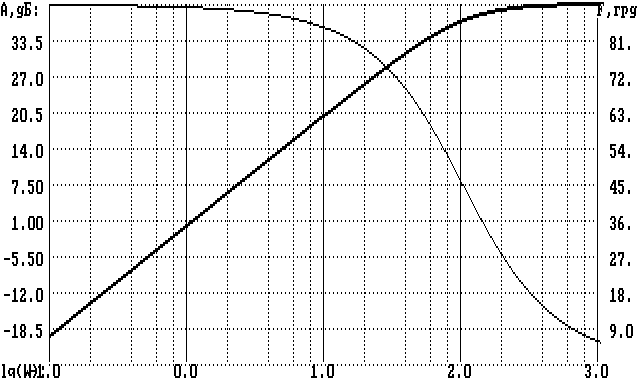
Рисунок 2.10 - ЛАЧХ и ЛФЧХ корректирующего звена №2
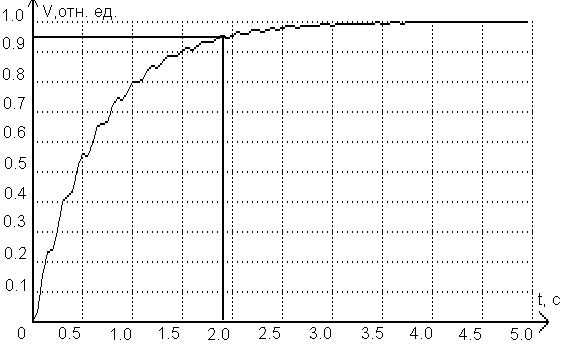
Рисунок 2.11 - График переходного процесса в гидроприводе торцового ориентирования

Рисунок 2.12 - График переходного процесса в гидроприводе вращения валка
Проанализировав полученные графики переходных процессов, можно сделать следующие выводы:
время переходного процесса, до входа заданного параметра в 5% зону для привода вращения валка tПП2.1 с; для привода торцового ориентирования - tПП1.8 с, что для данного объекта, рабочий цикл которого составляет для разных марок стали и типоразмеров валков от 4-5 до 24 часов, является вполне приемлемой величиной;
колебательность, проявляющаяся при разгоне приводов, не превышающая 1% при заданном желаемом значении 20%, значительно ниже и при высокой инерционности приводов влияния на качество переходного процесса не окажет.
Таким образом, спроектированные приводы являются высококачественными, удовлетворительными по мощности, потреблению энергоносителей, качеству переходных процессов в динамических режимах (разгон-торможение) и высокому постоянству поддержания заданного параметра (скорости и отработки положения) в статических (рабочих) режимах.
Кроме того, в составе приводов отсутствуют дорогостоящие импортные электрические и гидравлические аппараты (в отличие от базового варианта, на котором установлены аппараты немецкой фирмы “KromSchroder”), что существенно снижает стоимость как самих приводов, так и автоматизированных систем управления ими.
0 комментариев