Функциональная
схема автоматизации
холодильного
модуля
Контуры
автоматического
заполнения
жидким агентом
ВО
Узел автоматического
включения
резервного
водяного насоса
Работа и
оттаивание
ВО №1
Нормальная
работа КМ №1
Опорожненние
РД и нормальная
работа КМ №2
Устройство и принцип работы
пульта автоматизации
компрессора
ПАК-11
Останов
агрегата в
любом режиме
управления
осуществляется
нажатием кнопки
SB1 в цепи 1-3
Стоимость
оборудования
Расчет освещения
Навигация
Останов агрегата в любом режиме управления осуществляется нажатием кнопки SB1 в цепи 1-3
Разработка системы автоматизации холодильной установки
79391
знак
6
таблиц
0
изображений
4.12. Останов агрегата в любом режиме управления осуществляется нажатием кнопки SB1 в цепи 1-3.
При этом отключается компрессор , маслонасос и электромагнитный вентиль YА1 и включается электромагнитный вентиль байпаса YА2 . При остановке агрегата с винтовым компрессором ,работавшим в режиме автоматического управления , поступает команда на открытие золотника . Кнопка SB1 размыкает одновременно свой контакт в цепи 73-75, отключающий другую ступень при работе в составе агрегата двухступенчатого сжатия.
4.13. Независимо от режима управления схемой предусмотрены защита с сигнализацией причин останова компрессора от следующих аварийных ситуаций :
отсутствие протока охлаждающей воды;
высокого давления нагнетания;
высокой температуры нагнетания ;
высокого уровня жидкого хладагента в отделителе жидкости ;
низкой разности давления масла.
Кроме того предусмотрен один резервный вход ( при использовании резервного входа следует снять перемычку 47-53 и вместо нее подключить размыкающий контакт соответствующего датчика - реле , а его замыкающий контакт подключить к проводам 47-39).
4.14. При срабатывании любого датчика - реле защиты происходит отключение компрессора . При этом на цифровом индикаторе высвечивается цифра , которой соответствует определенный символ , показывающий причину аварийного останова . Одновременно на центральный щит автоматики выдается обобщенный сигнал “Авария”.
![]()
4.15. После устранения неисправности сброс аварийного светового сигнала осуществляют кратковременным отключением тумблера “Сеть”.
4.16 . Повторный пуск компрессора после аварийного останова возможен только после нажатия кнопки SB2.
4.17 Подготовка пульта к работе.
4.17.1. Провести внешний осмотр пульта.
4.17.2. Установить пульт на место эксплуатации и подключить его в соответствии со схемой подключения кабелей.
4.17.3. Подать питание на пульт.
4.17.4 Включить тумблер “Сеть”.
4.18 Порядок работы.
4.18.1 Работа в режиме с ручным управлением.
![]()
4.18.1.2. Нажать пусковую кнопку “1” . При этом на цифровом индикаторе высвечивается цифра “0”.
4.18.1.3. При управлении агрегатом с поршневым компрессором одновременно с нажатием пусковой кнопки “1” включается маслонасос, а затем , при установке золотника в положение , соответствующее минимальной производительности, включается компрессор. Перемещение золотника осуществляется осуществляют в ручную с помощью местных кнопок “SB3”(уменьшение производительности ) и “SB4” ( увеличение производительности).
После пуска компрессора золотник устанавливают в положение , соответствующее требуемой производительности.
4.18.1.5. Останов компрессора осуществляют нажатием кнопки “0”.
![]()
4.18.2.1. Установить тумблер выбора режима в положение
4.18.2.2. Нажать пусковую кнопку “1” . При этом на цифровом индикаторе высвечивается цифра “0”.
4.18.2.3. После нажатия пусковой кнопки “1” пуск и останов компрессора осуществляются автоматически от команеды командоаппарата.
4.18.2.4. Принудительный останов компрессора осуществляется нажатием стоповой кнопки “0”.
4.18.3. Перевод с одного режима на другой может осуществлятся при работающем компрессоре.
4.18.4. Сброс аварийного светового сигнала после устранения неисправности осуществляется кратковременным отключением питания пульта тумблером “Сеть “.
5 РАСЧЕТ ТЕМПЕРАТУРЫ В ХОЛОДИЛЬНОЙ КАМЕРЕ
Расчет будем производить на основании [ 7 ] . В инженерной практики принято промышленные холодильные камеры описывать линейным дифференциальным уравнением 1-го порядка с постоянными коэффициентами . Камеры являются весьма инерционными объектами . Так , например , постоянная времени Т рассматриваемой холодильной камеры равна 100 ч.
Однако промышленные холодильные камеры фактически являются многоемкостными объектами и более точно их следует описывать дифуравнениями выше первого порядка с тем , чтобы проверить насколько целесообразна их апроксимация дифуравнениями первого порядка .
В [ 7 ] предлагается описывать холодильную камеру линейным уравнением второго порядка с постоянными коэффициентами:
d2Dt dDt
Т1 * Т2 ѕѕ + (Т1 + Т2 ) ѕѕ + Dt = Dty
dt2 dt
Используя уравнение (1) и , пренебрегая запаздыванием объекта , проводили исследования двухпозиционной системы регулирования в холодильной камере . Расчет проводили методом Рунге - Кутта ( исходный текст программы приведен в приложении).
Метод Рунге - Кутта предназначен для дифференциального уравнения второго порядка вида (c учетом того , что Dty изменяет свое значение в зависимости от того работают компрессоры или происходит нагрев воздуха в камере за счет естественного притока тепла , или же при отрицательных температурах окружающей среды когда воздух в камере исскуственно подогревается за счет нагревательных элементов или температура в камере падает за счет естественного оттока тепла через стены камеры)
d2Dt
Dt”= ѕѕ = F(t , Dt , Dt’, Dty),
dt2
имеющий погрешность R~(h5) , реализовался с помощью следующих формул [ 8 ] :
К1=h * F(ti ; Dt i ; Dt’i ; Dtyi);
К2=h * F(ti +(h/2); Dt i +(h/2)* Dt’i+(h/8)* К1 ;Dt’i + (К1/2); Dtyi);
К3=h * F(ti +(h/2); Dt i +(h/2)* Dt’i+(h/8)* К1 ;Dt’i + (К2/2); Dtyi);
К4=h * F(ti +h; Dt i +h* Dt’i+(h/2)* К3 ;Dt’i + К3; Dtyi);
Dt i+1=Dt i+ h*[ Dt’i +( К1+ К2 + К3 )/6] ;
Dt’i+1 =Dt’i + (К1+ 2*К2 + 2*К3 + К4)/6
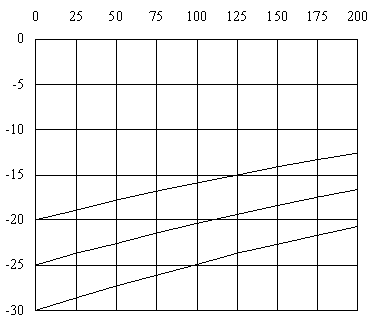
Расчет проводился на участке от 0 ч до 200 ч при следующих начальных условиях:
Dt 0= Dt0;
Dt’0 = 0.
Вариант 1. Т1 =100 ч ,Т2 =10 ч , заданный диапазон 0,5 - 1 °С, установившаяся температура при ее росте 10 °С и установившаяся температура при ее снижении минус 3 °С . При этом были получены следующие результаты : фактический диапазон поддержания температуры составил 0,45 - 1,25 °С , а период колебаний 54 ,2 часа .График переходного процесса и протокол работы приведен в приложении .
При описании холодильной камеры линейным дифуравнением первого порядка следующего вида :
dDt
Т ѕѕ + Dt = Dty
dt
провели аналогичные исследования системы двухпозиционного регулирования , т.е. полагали Т= Т1 +2* Т2=120 ч, а остальные данные были такими же , как и в варианте 1 . При этом температура поддерживалась в заданном диапазоне ( запаздыванием пренебрегали), а период колебаний составил 22,5 ч .
Из приведенных данных следует , что фактический диапазон поддержания температуры при более точном математическом описании холодильной камеры увеличивается в 1,6 раза а период колебаний возрастает в 2,5 раза . Следовательно для приведенных исходных данных рассматривать камеру в упрощенном варианте не следует .
Вариант 2. Т2 = 0,5 ч , а остальные данные аналогичны варианту 1 . По данному варианту получили , что температура поддерживается в заданном диапазоне , а период колебаний составил 21,3 ч . Исследования в упрощенном объекте ( Т = 101 ч ) показало , что период колебаний получился равным 19 ч . Как видим , для варианта 2 апроксимация холодильной камеры апериодическим звеном первого порядка вполне допустима.
Вариант 3 . Поддержание рабочей температуры в камере происходит за счет работы электронагревателей при Т1 =100 ч ,Т2 =15ч , заданный диапазон 0,5 - 1 °С, установившаяся температура при ее росте 4 °С и установившаяся температура при ее снижении минус 5 °С . При этом были получены следующие результаты : фактический диапазон поддержания температуры составил 0,307 - 1,082 °С , а период колебаний 73 часа .График переходного процесса и протокол работы приведен в приложении .
Вариант 4 . Т2 =1.5 ч , а остальные данные аналогичны варианту 3. По данному варианту получили , что температура поддерживается в заданном диапазоне , а период колебаний составил 30,3 ч . Исследования в упрощенном объекте ( Т = 103 ч ) показало , что период колебаний получился равным 29 ч . Как видим , для варианта апроксимация холодильной камеры апериодическим звеном первого порядка вполне допустима.
Как мы можем видеть из рассмотренного выше целесообразно производить апроксимацию холодильной камеры апереодическим звеном первого порядка только в тех случаях когда постоянная времени Т2 составляет не более чем 0,01...0,025 Т1 то есть ее влияние на качество переходного процесса - несущественно .
В случае , когда постоянная времени Т2 составляет 0,1Т2 то эта апроксимация приводит к значительным погрешностям при расчетах , что недопустимо в современной инженерной практике .
На основании вышеизложенного можно сделать следующий вывод: в современной инженерной практике при использовании средств вычислительной техники необходимо для повышения точности расчетов рассматривать промышленную холодильную камеру , как апериодическое звено второго порядка ( при Т2 > 0,01...0,025 Т1 )
6 ТЕХНИКО - ЭКОНОМИЧЕСКОЕ ОБОСНВАНИЕ ПРОЕКТА
6.1 Расчет капитальных вложений
6.1.1 Стоимость строительного объема камеры( Кзд)
Кзд=Vзд*Сзд, где
Vзд - объем строительный модуля м3
Сзд - стоимость 1 м3 строительства
Кзд=6*18*6*40=25920 грн.
Похожие работы
... решить только на основе широкого внедрения автоматики в производственные процессы и внедрить автоматизированные системы в различные сферы хозяйственной деятельности, и в первую очередь в проектирование, управление оборудованием и технологическими процессами. Поднять уровень автоматизации производства примерно в 2 раза. Создавать комплексно-автоматизированные производства, которые можно быстро и ...
... , а при снижении - нарушается подача в испаритель Рисунок 1.6 - Блок-схема алгоритма функционирования 2-уровнего управления 1.9 Структура алгоритма адаптивного управления Для данной системы управления, в которой свойства холодильной установки можно считать не изменяющимися во времени, т.к. площадь теплопередающей поверхности испарителя не меняется, коэффициент ...
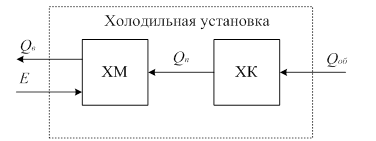
... камере понижается ниже допустимой, то в данном случае включаются электронагреватели, которые встроены в ВО. Включением и выключением поддерживают заданную температуру в камере. 2.2 Работа узлов функциональной схемы автоматизации холодильного модуля Основной регулируемой величиной в данной схеме есть температура воздуха в холодильной камере. Ее регулируют включением и выключением КМ , а зимой ...
... батареи и воздухоохладители)? испарители для охлаждения промежуточного хладоносителя; отделители жидкости или защитные ресиверы (при надобности). Автоматизация испарительной системы холодильной установки с промежуточным хладоносителем (рассолом) предусматривает: а) автоматическое регулирование температуры воздуха в охлаждаемых помещениях; б) автоматическое регулирование температуры ...
0 комментариев