Навигация
Реферат
В данной записке содержится расчёт элементов следящей системы, а так же некоторых параметров, характеризующих всю систему в целом.
В записке присутствуют необходимые для расчётов номограммы и графики, которые были заимствованы из [1]; таблицы со справочными данными отдельных элементов следящей системы.
Объём расчётно-пояснительной записки листов плюс приложение, в котором изображена электрическая принципиальная схема разомкнутой следящей системы.
Введение
Современные системы автоматического управления представляют собой сложные комплексы взаимодействующих технических устройств и элементов, работа которых основана на различных физических принципах. Различно также их конструктивное выполнение и технические характеристики.
Несмотря на многообразие отдельных систем автоматического управления и входящих в них элементов, последние могут быть сведены к нескольким основным типам, различающимся по их назначению и взаимодействию в системе управления.
САУ должна выполнять одновременно две задачи:
1) обеспечивать с требуемой точностью изменение выходной величины системы в соответствии с поступающей извне входной величиной, играющей роль команды. При этом необходимо преодолевать инерцию объекта управления и других элементов системы.
2) при заданном значении входной величины система должна, по возможности, нейтрализовать действие внешних возмущений, стремящихся отклонить выходную величину системы от предписываемого ей в данный момент значения.
Целью данной работы является создание САУ, которая бы удовлетворяла поставленным задачам.
Задание на курсовую работу № 34.
| Jн,Нмс2 | Мн,Нм | Ωн max рад/с2 | εн max рад/с2 | δm, град | γ, град | Вид входного воздействия | Критерий устойчивости |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 4*10-2 | 4 | 6 | 80 | 0,35 | 50 | Плавное воздействие | Михайлова |
В таблице использовались следующие обозначения:
Jн- момент инерции нагрузки
Мн- момент нагрузки
Ωн max- максимальная угловая скорость нагрузки
εн max- максимальное угловое ускорение нагрузки
δm- максимальная ошибка
γ - запас устойчивости системы по фазе
Содержание
1. Функциональная схема системы
2. Выбор и расчёт элементов системы
выбор двигателя
расчёт передаточного числа
редуктора
выбор типа усилителя
выбор датчика рассогласования
выбор и расчёт предварительного усилителя
3. Устойчивость разомкнутой системы
4. Литература
5. Приложения
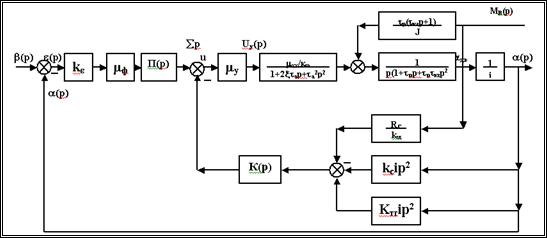
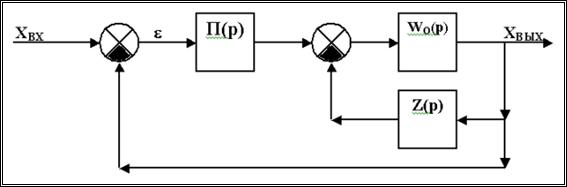
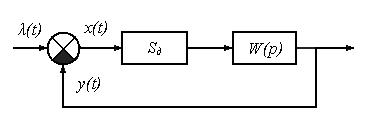
Функциональная схема системы

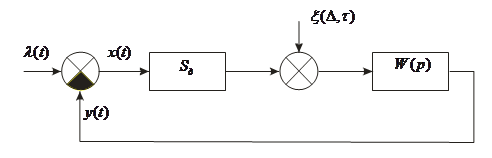
Рассматриваемая следящая система относится к числу дистанционных систем, в которых сравнение сигналов управления и обработки производится путем суммирования электрических величин. Это повышает удобство пользования системой автоматического регулирования, так как задающее устройство можно расположить в удобном для пользователя месте, а также повышает надежность системы потому, что электронную часть САУ можно расположить вдали от ОУ, который обычно находится в жестких условиях.
Система работает следующим образом. Входная и выходная величины САУ сравниваются в измерителе рассогласования. Сигнал ошибки усиливается по напряжению в УН и по мощности в УМ, а затем подается на управляющую обмотку электродвигателя, который вращаясь стремиться уменьшить сигнал рассогласования. Для получения требуемой скорости вращения в схему включен редуктор.
Выбор исполнительного двигателя.
Мощность двигателя выбираем из условия обеспечения заданного режима работы объекта управления.
Исходными данными для выбора двигателя служат следующие параметры нагрузки: момент трения Мн, момент инерции Jн, угловая скорость Ωн и угловое ускорение Сн.
Выбор двигателя начнем с ориентировочного определения необходимой мощности на его валу, для чего можно воспользоваться формулой:
![]() Jнεн + Мн) Ωн Вт
Jнεн + Мн) Ωн Вт
подставив численные значения величин, получим
Ртр=![]() (4*10-2*80+4)*6=108 Вт
(4*10-2*80+4)*6=108 Вт
Так как требуемая мощность двигателя превышает 100 Вт то выбираем двигатель постоянного тока, который обладает хорошими регулировочными и механическими характеристиками, значительным пусковым моментом. К недостаткам двигателей постоянного тока можно отнести большой момент статического трения, искрение между коллектором и щетками, генерирование радиопомех.
Для нашей системы возьмем двигатель постоянного тока МИ-22, который имеет следующие основные характеристики:
| Напряжение В | Мощность на валу, кВт | Ток якоря, А | Скорость вращения об/мин | Мощность возбуждения Вт | Маховый момент, кг м2 | Сопротивление якоря Ом | Статический момент трения кг см | Сопротивление обмотки возбуждения, Ом |
| 110 | 0,12 | 1,4 | 1000 | 16 | 0,016 | 4,58 | 1,5 | 790 |
Так как электродвигатель обладает значительной мощностью, то для обеспечения заданных значений напряжения и тока обмотки управления, в качестве усилителя мощности выбираем электромашинный усилитель - ЭМУ.
Расчет передаточного числа редуктора.
Из условия обеспечения точности воспроизведения заданного закона движения управляющей оси определим оптимальное передаточное число редуктора.
в формуле применяются следующие обозначения:
fдв - коэффициент внутреннего демпфирования двигателя;
Jдв - момент инерции двигателя с подключенным к нему редуктором.
Коэффициент демпфирования двигателя может быть найден из формулы:
fдв=![]() , где
, где
Се и См - конструктивные постоянные;
(Се - скоростной коэффициент; См - коэффициент пропорциональности между током якоря и вращающим моментом Мвр двигателя).
В системе СИ Се = См и поэтому: fдв=![]() , где
, где
R - суммарное сопротивление якорной обмотки двигателя Rя и выходного сопротивления усилителя мощности (Rдоб).
Если бы двигатель питался от источника весьма большой мощности, например от сети, то сопротивление источника управляющего напряжения можно было бы принять равным нулю. Но так как в качестве усилителя мощности мы взяли ЭМУ, выходная мощность которого сопоставима с мощностью электродвигателя, то пренебрегать этим сопротивлением нельзя.
Rдоб![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
| |
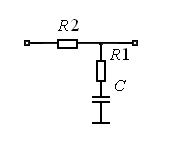
В данном случае роль Rдоб выполняет выходное сопротивление усилителя. Так как добавочное сопротивление включено последовательно с якорной обмоткой двигателя, то они суммируются. С учетом этого
R = Rя+Rдоб = Rя+Rвых
Выходное сопротивление ЭМУ
![]() Ом,
Ом,
где ![]() - степень недокомпенсации ЭМУ.
- степень недокомпенсации ЭМУ.
R = Rя+Rвых=4,58+13,357=17,937 Ом
В зависимости от значения R двигатель обеспечивает различные значения пускового момента. Если добавочное сопротивление в цепи якоря отсутствует, то считают, что двигатель работает на естественной характеристике.
Механическая характеристика
двигателя постоянного тока с независимым возбуждением.
![]() Ωдв
Ωдв
 Ωхх
Ωхх
![]() γ
γ
![]() Мп Мвр
Мп Мвр
Естественная характеристика отличается наибольшим углом наклона к оси скоростей и наибольшим пусковым моментом.
Если Rдоб≠0, двигатель будет работать на искусственной механической характеристике.
Конструктивная постоянная Се может быть вычислена на основе номинальных паспортных данных:
![]()
![]()
Определяем коэффициент внутреннего демпфирования fдв:
fдв=![]()
Для определения оптимального передаточного числа редуктора необходимо найти момент инерции двигателя с подключенным к нему редуктором Jдр
Jдр= Jдв + Jр, где
Jдв - момент инерции двигателя;
Jр - момент инерции редуктора, приведенный к валу двигателя.
Для мощных двигателей: Jр=0,1 Jдв
С учетом этого: Jдр= Jдв +0,1 Jдв=1,1 Jдв
Момент инерции двигателя находим из махового момента по формуле:
Jдв=![]() ,где
,где
G - маховый момент, кг м2.
Jдр=1,1*4*10-3=4,4*10-3
Подставив найденные значения в формулу для нахождения оптимального передаточного числа редуктора, получим:
iопт=
Определим передаточное число редуктора из условия обеспечения точности воспроизведения заданного закона движения управляющей оси. Для этого найдем требуемый пусковой момент:
МП=![]()
Минимальный пусковой момент:
МП min=2
Взяв отношение Мп к Мпmin получим:
![]()
![]()
 Мп
Мп
![]()
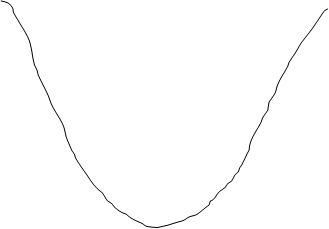
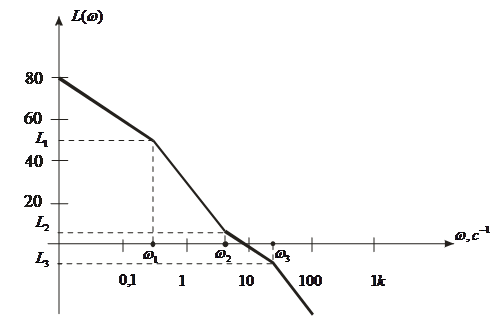
Из графика изображенного на рис.1 видно, что при МП/МП min =1система может воспроизвести заданный закон движения только при.
Если МП/МП min >1, то любое значение передаточного числа редуктора, взятое в интервале 0,8< i<1,4 (для МП/МП min=1,227), обеспечит воспроизведение заданного закона движения, причем при больших значениях i получаются меньшие значения электромеханической постоянной времени системы. С учетом сказанного возьмем i/iопт=1,2, при этом передаточное число редуктора
i = iопт 1,2= 3,64*1,2=4,368 ≈ 4
С учетом найденных значений произведем проверку двигателя по максимальной скорости вращения, которая должна удовлетворять условию:
Ωдв max ≤ (1.2 - 1.3) Ωдв ном, где
Ωдв max = ΩН max i
Ω дв max = 6*4=24 рад/с
Похожие работы
... переходного процесса для системы с дискретным корректирующим звеном. 2.6.8. Определение рекуррентного уравнения дискретного корректирующего звена. 2.6.9. Разработка принципиальной схемы цифровой следящей системы. 2.7. Расчетно-пояснительная записка должна содержать следующие разделы. 2.7.1. Введение (цель выполнения работы, описание следящей системы, принцип ее ...


ьной обратной связью по току и по скорости Принципиальная схема проектируемой следящей системы. 1.1 Основные элементы принципиальной схемы следящей системы ФЧВ – фазочувствительный выпрямитель осуществляет выпрямление сигнала переменного тока в сигнал постоянного тока с учетом знака. П(р) – последовательное корректирующее устройство обеспечивает введение в закон управления сигнала ...
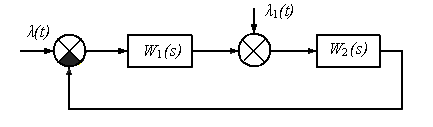
... в точке подачи обратной связи и определяется как передаточная функция от ошибки x(t) к управляемой величине y(t) . Передаточные функции в обобщенной структурной схеме радиотехнической следящей системы Основная передаточная функция – передаточная функция замкнутой системы. Определяется отношением изображений по Лапласу управляемой величины и задающего воздействия: где Передаточная ...
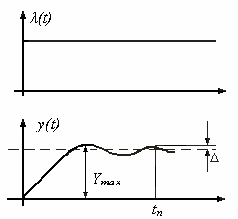
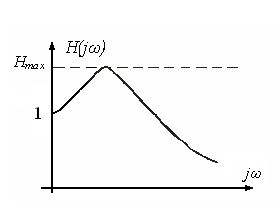
... звенья, у которых Н(0) = 1, показателем колебательности является абсолютный максимум АЧХ (рис.2): . Рекомендуемые значения показателя колебательности - 1,1…1.5. Анализ установившейся (динамической) ошибки Оценка показателей качества следящей системы производится при следующих типовых воздействиях: - линейное; - квадратичное; - полиномиальное. Линейное воздействие имеет место, в ...
0 комментариев