Навигация
МВТ - 10 П, а в качестве ВТ-приемника 30 МВТ - 5 П
18178
знаков
7
таблиц
5
изображений
8 МВТ - 10 П, а в качестве ВТ-приемника 30 МВТ - 5 П.
Основные технические характеристики ВТ-датчика
| Номинальное напряжение, В | Частота питающей сети, Гц | Коэффициент трансформации | Выходное сопротивление холостого хода, Ом | Статический момент трения, Г см | Скорость вращения ротора, об/мин | Материал магнитопровода |
| 50 | 400±20 | 1 | 800 | 80 | 60 | пермаллой |
ВТ-приемника
| 50 | 400±20 | 0,56 | 3000 | 80 | 60 | пермаллой |
Для симметрирования обмотку статора ВТ-датчика замыкают накоротко (в общем случае ее замыкают на сопротивление, равное сопротивлению источника питания ~Uв, которое обычно бывает незначительным). Роторную обмотку ВТ-приемника подключают к Rн. В данной системе это входное сопротивление предварительного усилителя. Вторую обмотку подключают к Zс, которое равно Rн.
Определение общего коэффициента усиления разомкнутой системы
Коэффициент усиления системы определяется из условия обеспечения заданной точности, которая характеризуется максимально допустимой погрешностью δm, оговоренной в техническом задании на систему. δm можно разделить на две части: δ1и δ2 из которых первая не зависит, а вторая зависит от коэффициента усиления. Составляющая δ1 включает в себя погрешность измерителя рассогласования, а δ2 для систем с астатизмом 1-го порядка в общем случае δ2=δм + δΩ + δε ,
где δm - моментная ошибка
δΩ - скоростная ошибка
δε - ошибка по ускорению
итак δm = δ1 + δ2 => δ2 = δm - δ1
δ1 =δн = √ (0,033)2 + (0,033)2 =0,0470
![]()
Электромеханическая постоянная времени:
Используя приведенные формулы определим δ2:
δ2=
Подставив известные численные значения получим
δ2=![]()
Как было отмечено ранее δ2 = δm - δ1
Следовательно δ2=0.35-0.047=0.3030
Или δ2=5.3*10-3
С учетом этого
5.3*10-3=![]()
к=3321,8
Коэффициент усиления разомкнутой системы определяется по формуле
к=кдкукдв![]()
кд - коэффициент передачи датчика рассогласования
так как в качестве измерителя рассогласования применяются ВТ, технические характеристики которых были приведены ранее, то
кд=1*0,56*50=28
кдв - коэффициент передачи двигателя:
кдв= ![]()
Определим коэффициент усиления по напряжению:
ку= 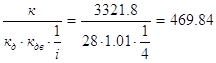
Коэффициент усиления по напряжению зависит от коэффициента усиления УМ и предварительного усилителя, т.е.
ку=кпу кум =коу кэму
Следовательно коу= ку/ кэму, где
кэму - коэффициент усиления ЭМУ по напряжению (кэму = 15,00)
коу=469,84/15=31,32
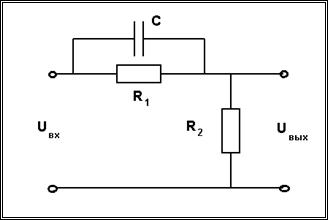
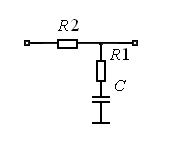
Принципиальная электрическая схема предварительного усилителя выполненного на операционного усилителе будет выглядеть следующим образом:
Так как в системе применяется инвертирующий усилитель (он обладает лучшей стабильностью и менее склонен к самовозбуждению), его коэффициент усиления определяется соотношением резисторов R1 и R2.
Входное сопротивление данного усилителя в основном определяется резистором R1, поэтому с целью увеличения входного сопротивления усилителя значение сопротивления R1нужно брать как можно больше, но с целью повышения стабильности каскада сопротивление резистора обратной связи R2 следует выбирать как можно меньше, причем с уменьшением R2 падает коэффициент усиления. Для обеспечения требуемого коэффициента усиления, сохранения высокого входного сопротивления и получения достаточной стабильности усилителя возьмем R1=45 кОм и R2=1 МОм
при этом обеспечится коэффициент усиления,который можно повысить до требуемого значения переменным резистором R1.
Для того, чтобы операционный усилитель не перегружался в случае полного выведения R1, в качестве R1применим последовательное соединение двух резисторов.
Для обеспечения регулировки коэффициента усиления в требуемых пределах сопротивление резистора возьмем равным 20 кОм, а = 25 кОм.
Литература.
1. Выгода Ю.А., Малев Б.А., Марченко В.В., Балабаев М.С.
«Основы расчета систем автоматического управления»
ПВАИУ, 1970г. Пенза.
2. Выгода Ю.А., Марченко В.В.
«Элементы автоматических систем»
ППИ, каф. АиТ, 1970г. Пенза.
3. Васильев Д.В.
«Системы автоматического управления»
«Высшая школа», Москва 1967г.
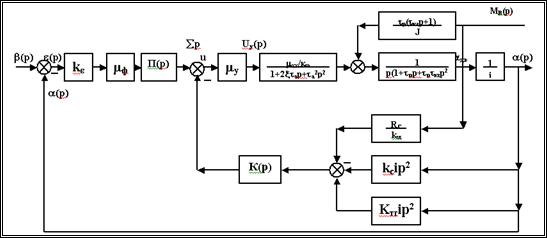
Описание принципиальной электрической схемы.
При наличии угла рассогласования между ротором ВТ-датчика и ротором ВТ-приемника, в обмотке ВТ-приемника появится напряжение рассогласования так как ВТ используются в трансформаторном режиме. Это напряжение поступает на усилитель напряжения, выполненный на операционном усилителе 140 УД 7 который обладает высоким входным сопротивлением и сравнительно мощным выходным каскадом, нужный для нормальной работы трансформатора Тр 2, сопротивление первичной обмотки которого должно быть достаточно велико чтобы не перегружать ОУ. Напряжение, снимаемое со вторичной обмотки этого трансформатора, поступает на фазочувствительный выпрямитель ФЧУВ. Нагрузкой ФЧУВ служат две дифференциально включенные высокоомные обмотки управления ЭМУ, который служит для усиления сигнала по мощности. Если напряжение на входе ФЧУВ равно 0, то в сбалансированной схеме выходное напряжение также будет равно нулю. При значениях 0 на выходе появится напряжение величина и полярность которого зависят от амплитуды и фазы входного сигнала. С целью сглаживания пульсации коллекторного тока сопротивления нагрузки шунтируются конденсаторами.
Усиленный по мощности сигнал с ЭМУ поступает на якорную обмотку исполнительного двигателя, ротор которого через понижающий редуктор соединен с объектом управления.
Питание всей схемы осуществляется от сети трехфазного тока 380 В 50 Гц . Непосредственно связан с сетью только приводной двигатель ЭМУ, остальная часть схемы питается через преобразователь частоты 50 Гц/ 400 Гц и трансформатор Тр 1. При этом значительно снижаются габариты трансформатора так как он работает на повышенной частоте.
Для питания ОУ используются интегральные стабилизаторы КР 142 ЕН8 которые питаются от вторичных обмоток Тр 1 через выпрямители выполненные на диодной сборке КЦ 407 А и сглаживающие фильтры С1- С4.
С целью уменьшения вторичных обмоток Тр 1 ФЧУВ питается от одной из обмоток стабилизатора напряжения для питания ОУ.
Обмотка возбуждения двигателя постоянного тока питается через выпрямитель, выполненный на диодах Д 226 Б и сглаживающий пульсации выпрямленного напряжения -фильтр, выполненный на дросселе и конденсаторе С5.
Похожие работы
... переходного процесса для системы с дискретным корректирующим звеном. 2.6.8. Определение рекуррентного уравнения дискретного корректирующего звена. 2.6.9. Разработка принципиальной схемы цифровой следящей системы. 2.7. Расчетно-пояснительная записка должна содержать следующие разделы. 2.7.1. Введение (цель выполнения работы, описание следящей системы, принцип ее ...

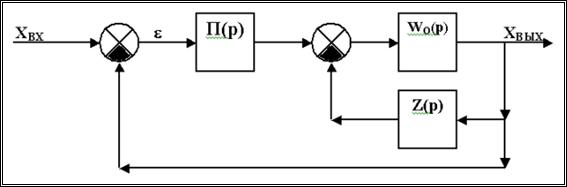

ьной обратной связью по току и по скорости Принципиальная схема проектируемой следящей системы. 1.1 Основные элементы принципиальной схемы следящей системы ФЧВ – фазочувствительный выпрямитель осуществляет выпрямление сигнала переменного тока в сигнал постоянного тока с учетом знака. П(р) – последовательное корректирующее устройство обеспечивает введение в закон управления сигнала ...
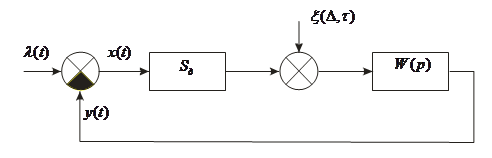
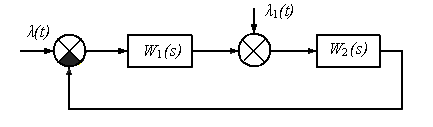
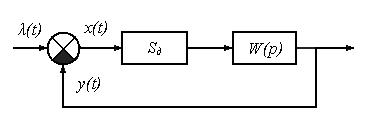
... в точке подачи обратной связи и определяется как передаточная функция от ошибки x(t) к управляемой величине y(t) . Передаточные функции в обобщенной структурной схеме радиотехнической следящей системы Основная передаточная функция – передаточная функция замкнутой системы. Определяется отношением изображений по Лапласу управляемой величины и задающего воздействия: где Передаточная ...
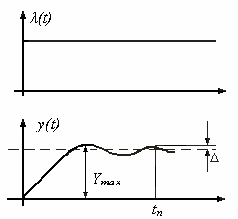
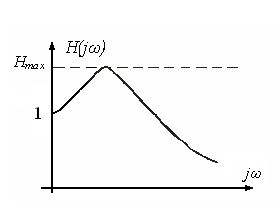
... звенья, у которых Н(0) = 1, показателем колебательности является абсолютный максимум АЧХ (рис.2): . Рекомендуемые значения показателя колебательности - 1,1…1.5. Анализ установившейся (динамической) ошибки Оценка показателей качества следящей системы производится при следующих типовых воздействиях: - линейное; - квадратичное; - полиномиальное. Линейное воздействие имеет место, в ...
0 комментариев