Навигация
24 ≤ 1,2*104,72= 125,66
Расчет кинематики редуктора.
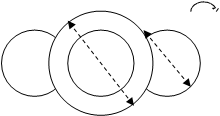
Для этого выберем число пар зацепления по номограмме, изображенной на рис.2.

Взяв две пары зацеплений определим передаточное число каждой пары. Для получения минимальной инерционности редуктора передаточное число каждой последующей пары должно быть связано с передаточным числом предыдущей пары соотношением:
in+1=![]()
Для того, чтобы получить минимальный момент инерции редуктора Jp, приведенного к валу двигателя, следует учитывать тот факт, что инерционность ближайших к двигателю вносит наибольший вклад в Jp. В связи с этим размеры шестерни, непосредственно связанной с валом двигателя следует выбирать по возможности меньшими. По этой причине передаточное число первой пары не должно превышать 2 - 3.
С учетом вышесказанного передаточное число первой пары примем i1=1,8
Следовательно: i2=![]()
Так как номограммы построены в предположении, что диаметры первой шестерни и третьей шестерни одинаковы, кинематическую схему редуктора можно представить следующим образом:
 | |||||
![]()
![]()
![]()
![]()

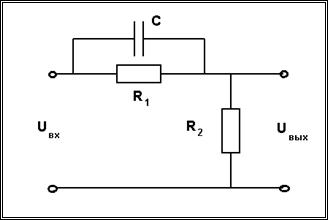
Выбор типа усилителя и расчет его коэффициента усиления по заданной мощности.
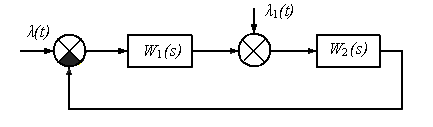
В связи с тем, что в системе применяется двигатель постоянного тока мощностью свыше 100 Вт, в качестве усилителя мощности (УМ) целесообразнее применить электромашинный усилитель (ЭМУ).
Для обеспечения нормальной работы двигателя в качестве УМ возьмем ЭМУ - 3А, который обладает следующими техническими характеристиками:
| Параметры генератора | Параметры двигателя | |||||||||||
| Мощность, Вт | Скорость вращения, об/мин. | Напряжение, В | Сила тока, А | КПД | Обмотки управления | Мощность, Вт | КПД | Напряжение, В | Род тока питающего приводной двигатель | |||
| Число обмоток | Входная мощность, Вт | Коэффициент усиления по мощности | Ток управления, мА | |||||||||
| 0,32 | 2850 | 115 | 1,82 | 0,6 | До 4 | 0,4 | 500 | 11 | 0,455 | 0,71 | 220 | 3х-ф |
Условие Iгн /Iя ≥ 1 выполняется
Iгн - номинальный ток ЭМУ
Iя - ток якоря двигателя
Iгн /Iя = 1,82/1,4=1,3 >1
Для определения тока управления предварительного усилителя воспользуемся характеристикой холостого хода ЭМУ, приведенной на рис.3
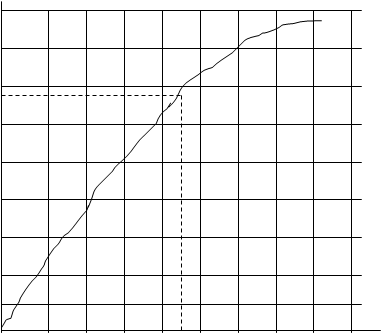
Максимальная форсировка тока управления электронного усилителя определяется из условия, что скорость двигателя на холостом ходу не должна превышать номинальной скорости более чем на 30%. Максимально допустимое значение э.д.с. ЭМУ из условия
Еr max=(Uя - Iя Rя)*nmax / nН =(110 - 1,4*4,58)*1,3=134,66 Вт
Из рис.3 видно, что этому значению Еr max соответствует Iу max = 13 мА.
В качестве предварительного усилителя применим электронный усилитель, выходной каскад которого является фазочувствительным усилителем-выпрямителем (ФЧУВ)
Для питания ФЧУВ необходим источник переменного напряжения. В качестве электронного усилителя возьмем операционный усилитель140 УД 7, который обладает высоким входным сопротивлением, значительным коэффициентом усиления и сравнительно мощным выходным каскадом. В связи с тем, что выходное напряжение ОУ изменяется практически до Uпит, напряжение, питающее ФЧУВ (Еа), должно быть несколько больше Uпит ОУ.
Для обеспечения требуемой выходной мощности ФЧУВ применим в нем транзисторы КТ 815.
Выбор измерителя рассогласования.
Так как ошибка системы не должна превышать 0,350, то в качестве измерителя рассогласования следует выбрать вращающийся трансформатор, причем его ошибка не должна превышать половины ошибки системы.
В качестве измерителя рассогласования возьмем ВТ типа ВТМ 0 класса точности, обеспечивающего максимальную статическую ошибку = 2’ (0,0330).
Для хорошего согласования ВТ-датчика и ВТ-приемника необходимо чтобы входное сопротивление ВТ-приемника превосходило выходное сопротивление ВТ-датчика. Поэтому в качестве ВТ-датчика применим ВТ типа
Похожие работы
... переходного процесса для системы с дискретным корректирующим звеном. 2.6.8. Определение рекуррентного уравнения дискретного корректирующего звена. 2.6.9. Разработка принципиальной схемы цифровой следящей системы. 2.7. Расчетно-пояснительная записка должна содержать следующие разделы. 2.7.1. Введение (цель выполнения работы, описание следящей системы, принцип ее ...

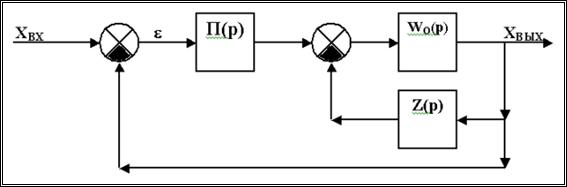

ьной обратной связью по току и по скорости Принципиальная схема проектируемой следящей системы. 1.1 Основные элементы принципиальной схемы следящей системы ФЧВ – фазочувствительный выпрямитель осуществляет выпрямление сигнала переменного тока в сигнал постоянного тока с учетом знака. П(р) – последовательное корректирующее устройство обеспечивает введение в закон управления сигнала ...
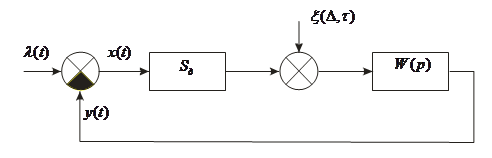
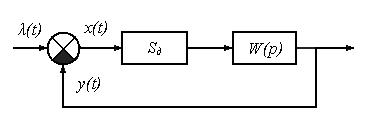
... в точке подачи обратной связи и определяется как передаточная функция от ошибки x(t) к управляемой величине y(t) . Передаточные функции в обобщенной структурной схеме радиотехнической следящей системы Основная передаточная функция – передаточная функция замкнутой системы. Определяется отношением изображений по Лапласу управляемой величины и задающего воздействия: где Передаточная ...
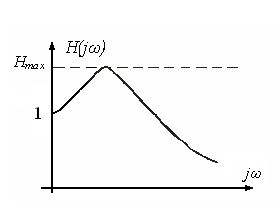
... звенья, у которых Н(0) = 1, показателем колебательности является абсолютный максимум АЧХ (рис.2): . Рекомендуемые значения показателя колебательности - 1,1…1.5. Анализ установившейся (динамической) ошибки Оценка показателей качества следящей системы производится при следующих типовых воздействиях: - линейное; - квадратичное; - полиномиальное. Линейное воздействие имеет место, в ...
0 комментариев