Навигация
Расчёт переходных процессов при движении тележки без груза
18432
знака
8
таблиц
0
изображений
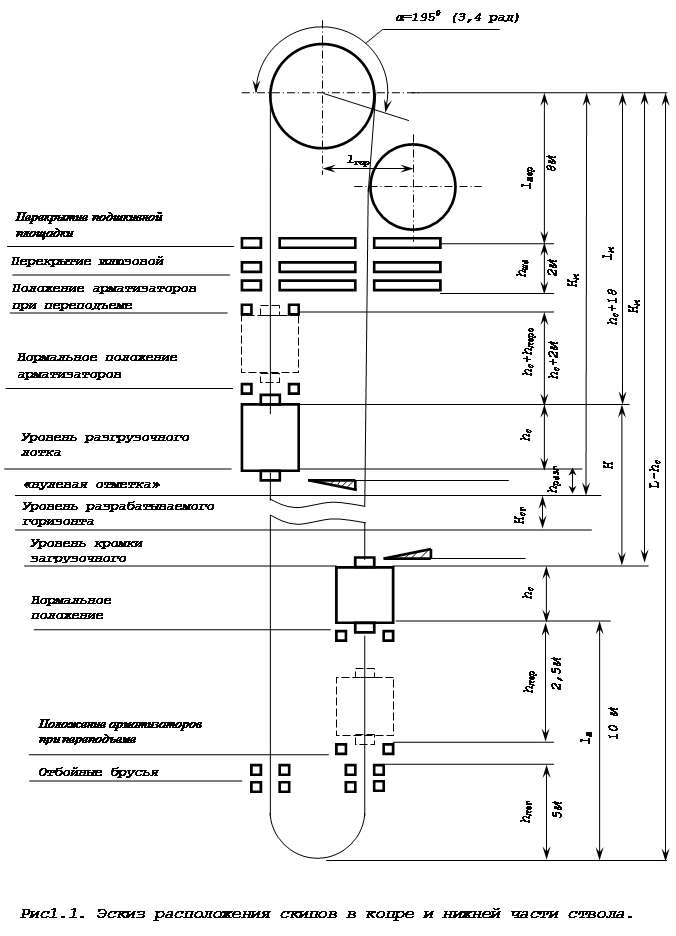
3.2 Расчёт переходных процессов при движении тележки без груза
I=Iдв+(I1/100%)Iдв+m(V/wдв)2
где I-момент инерции электропривода, кг*м2
m-масса тележки с грузом, кг
I=0,425+(25/100)*0,425+6000(0,32/800)2=0,53
Рассмотрим переходный процесс при движении тележки без груза по участкам
участок 1`-2`
wнач=0; wуст=w7=-84
Mнач=-M1=14; Mуст=-Mc2=-22,7
Tм1=Iw2/(-M1+M2)
Tм1=0.53*(-47)/(-320+158,7)=0.15
w=(wнач-w7)e-t/Tм1+w7
w=84e-t/0.15-84
M=(-M1+Mc2)e-t/Tм1-Mc2
M=(-320+22,7)e-t/0.15-22,7
Результаты вычислений сводим в таблицу
1 этап разгона
| t | 0 | 0,1 | 0,2 |
| w | 0 | -40,8 | -47 |
| M | -320 | -175,3 | -158,7 |
участок 3`-4`
wнач=w2`=-47; wуст=w8`=-88
Mнач=-M1=-320; Mуст=-Mc2=-22,7
Tм2`=I/(w4`-w2`)/(-M1+M2)
Tм2`=0.53(-47)/(-320+158,7)=0.15
w=(w2-w8)e-t/Tм`+w8
w=(-47+88)e-t/0.15-88
M=(-M1+Mc2)e-t/Tм2`-Mc2
M=(-320+22,7)e-t/0.075-22,7
Результаты вычислений сводим в таблицу
11 этап разгона
| t | 0 | 0,1 | 0,06 |
| w | -47 | -77,2 | -70 |
| M | -320 | -101,1 | -158,6 |
участок 5`-6`
wнач=w4`=-70; wуст=w6`=-90
Mнач=-M1=-320; Mуст=-Mc2=-22,7
Tм3`=I/(w6`-w4`)/(-M1+Mc2)
Tм3`=0.53(-90+70)/(-320+22.7)=0.035
w=(w4`-w6`)e-t/Tм3`+w6`
w=(-70+90)e-t/0.035-90
M=(-M1+Mc2)e-t/0.035-Mc2
M=(-320+22,7)e-t/0.035-22,7
Результаты вычислений сводим в таблицу
Выход на естественную характеристику
| t | 0 | 0,1 | 0,2 |
| w | -70 | -89,3 | -90 |
| M | -320 | -33,3 | -22,7 |
участок 5`-6`
wнач=w9`=-90; wуст=w10`=-17
Mнач=M9`=-2; Mуст=-Mc2=-22,7
Tм4`=I/(w9`-w10`)/(-Mc2+M9`)
Tм4`=0.53(-90+17)/(-22.7+2)=1.8
w=(w9`-w10`)e-t/Tм4`+w10`
w=(-90+17)e-t/1.8-17
M=(M9`+Mc2)e-t/Tм4-Mc2
M=(-2+22,7)e-t/1.8-22,7
Результаты вычислений сводим в таблицу
этап торможения
| t | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| w | -90 | -58,9 | -41,03 | -30,8 | -25 | -21,5 | -19,8 | -17,1 |
| M | -2 | -10,8 | -15,9 | -18,8 | -20,5 | -21,4 | -22 | -22,7 |
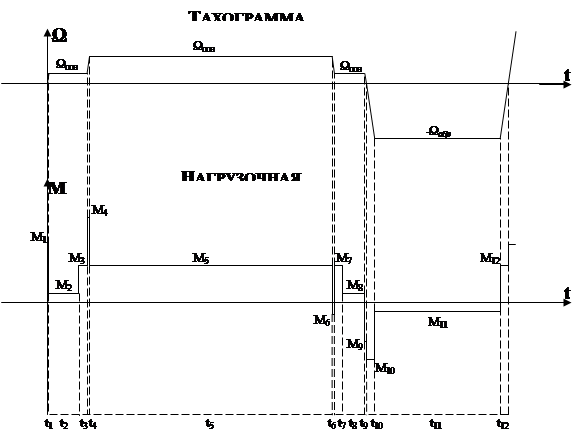
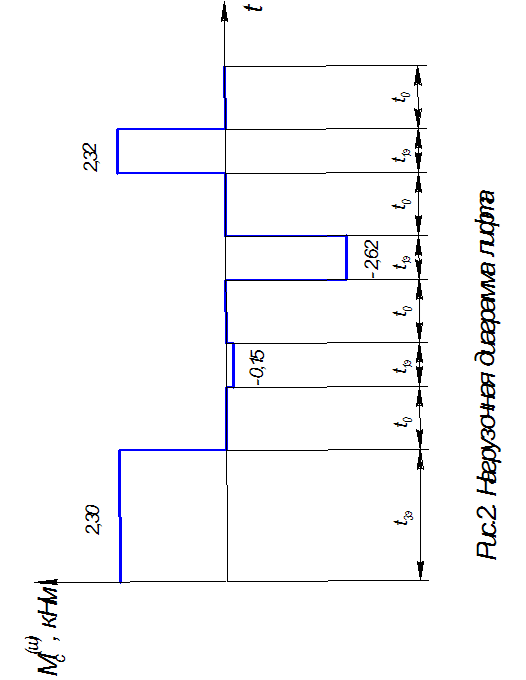
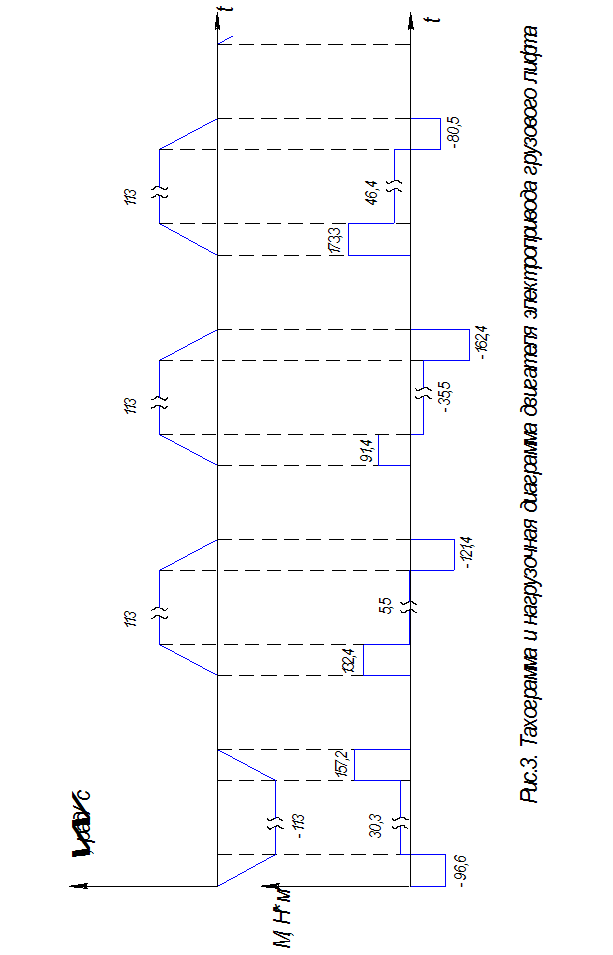
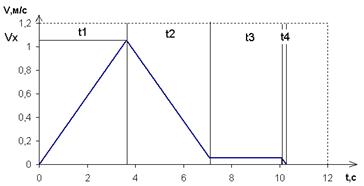
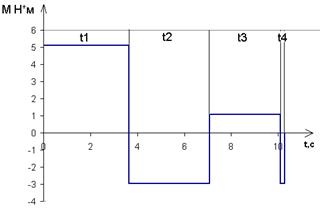
4.Строим нагрузочные диаграммы для проверки двигателя по нагреву
Движения тележки с грузом
SOAB=1/2AB*OB
SOAB=1/2*(110/60)*0.7=0.64 рад
Lпуск=SОАВ*D/2*ip
где D-диаметр ходовых колёс, м
ip-передаточное отношение редуктора
Lпуск=0,64*0,4/2*0,87=0,15 м
SCFGD=SCKE+SEFGD
SCKE=1/2CE*EK
SEFGD=ED*DG
SEFGD=(16/60)*3+0.8 рад
SCFGD=0.56+0.8=1.36 рад
Lторм г=SCFGD*D/2*ip
Lторм г=1.36*0.4/2*0.87=0.31 м
Lуст.г=L-(Lпуск.г+Lторм г)
Lуст.г=18-(0.15+0.31)=17.54 м
Определяем установившееся время работы при движении тележки с грузом
tуст.г=Lуст.г/V
tуст.г=17.54/0.32=54.8 с
Движение тележки без груза
SOAB=1/2AB*OB
SOAB=1/2(110/60)0.4=0.37 рад
Lпуск.б/г=SOAB*D2*ip
где Lпуск-расстояние, на которое перемещается тележка
во время пуска, м
Lпуск б/г=0,37*0,4/2*0,87=0,08 м
SCDEF=SKDG+SCKFE
SKDG=1/2KD*CE
SKDG=1/2(73/60)*3.6=2.19 рад
SCKFE=CK*CE
SCKFE=(17/60)*7=1.98 рад
SCDEF=2.19+1.98=4.17 рад
Lторм г=SCDFE*D/2*ip
Lторм г=4.17*0.4/2*0.87=0.96 м
Lуст.г=L-(Lпуск.б/г+Lторм б/г)
Lуст.г=18-(0.08+0.96)=16,96
Определяем установившееся время работы при движении тележки без груза
tуст.г=Lуст.б/г/V
tуст.б/г=16,96/0.32=53 с
Проверка двигателя по нагреву осуществляется методом эквивалентного момента, который определяется по нагрузочной диаграмме при работе тележки с грузом и без груза
Мэкв= М i2*ti/ ti<Mном
Мi= (Mнач2+Мнач*Мкон+Мкон2)/3
участок 1-2
Мi= (M12+M1*M2+M22)/3= (3202+320*158.7+158.72)/3=243.84
участок 3-4
Мi= (M12+M1*M2+M22)/3= (3202+320*158.7+158.72)/3=243.84
участок 5-6
Мi= (M12+M1*Mс1+Mс12)/3= (3202+320*128.7+128.72)/3=231.05
участок 9-10
Мi= (M92+M9*Mс1+Mс12)/3= (142+14*128.7+128.72)/3=78,66
Муст=128,7
участок 1`-2`
Мi= ((-M1)2+M1*M2+M22)/3= (3202+320*158.7+158.72)/3=243.84
участок 3`-4`
Мi= (M12+M1*M2+M22)/3= (3202+320*158.7+158.72)/3=243.84
участок 5`-6`
Мi= (M12+M1*Mс2+Mс22)/3= (3202+320*22,7+22,72)/3=191,64
участок 9`-10`
Мi= (M`92+M9`*Mс2+Mс22)/3= (22+2*22.7+22.72)/3=13.72
Муст=22.7
Мэкв= 243,842*0,3+243,842*0,2+231,052*0,2+78,662*3+128,72*54,8+243,842*0,13+
+243,842*0,6+191,642*0,2+13,722*7+22,72*53/119,43=93,59
Мэкв<Мном=133,46 Н*м
Мном*ПВном>Мэкв ПВэкв/ПВном
Мном*ПВном=Рном*ПВном/wном=9500/83,37=113,47 Н*м
Мэкв ПВэкв/ПВном = 93,59 34/40=86,29< Мном*ПВном
Двигатель проходит по нагреву
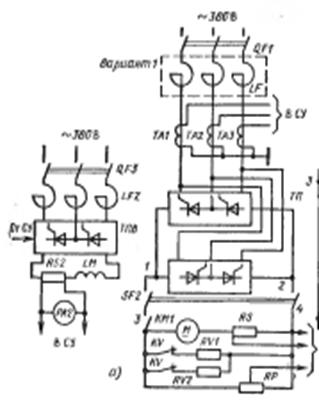
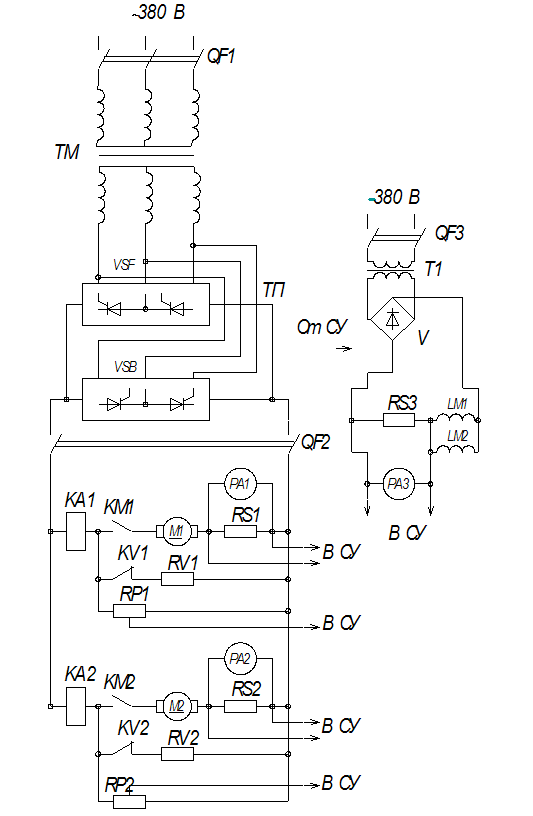
5.Проектирование релейно-контакторной схемы управления двигателем постоянного тока.
Двигатель должен иметь возможность реверсирования, а так же пускаться (в две ступени) в обоих направлениях. Проектирование осуществляется следующим образом :
а) Для осуществления реверса предусматриваем в силовой схеме подключение якоря электрической машины к сети через замыкающие контакты контакторов направления (КМ1-контакор «вперёд», КМ2-контактор « назад»), включённые в мостовую схему. В зависимости от того , какие контакты (КМ1 или КМ2) замкнуты, меняется полярность подводимого к якорю напряжения, следовательно, меняется направление вращения двигателя.
б) С целью осуществления двухступенчатого пуска включаем последовательно в цепь якоря два добавочных резистора (Rg1 и Rg2).Для коммутации резисторов (при переходе с одной пусковой характеристики на другую) параллельно им устанавливаем замыкающие контакты контакторов ускорения КМ3 и КМ4.
в) В цепи якоря устанавливаем катушку реле КА2 для максимальной токовой защиты и катушку реле нулевого тока КА1 в цепи обмотки возбуждения двигателя ОВ (для контроля за наличием тока в цепи ОВ (или для контроля за снижением этого тока ниже допустимого уровня).
Далее в силовой схеме для управления этой схемой предусматриваем командоконтроллёр. Автоматизация процесса пуска осуществляется в функции времени. Функцию минимальной защиты осуществляет включаемое в схему реле напряжения KV1. В случае снижения напряжения сети ниже допустимого уровня (0,8-0,85 Uном) исчезает напряжение реле KV1 отпадает к своим замыкающим контактом KV1:1 отключает схему управления, что приводит к отключения силовой схемы от сети и к фиксации механизма с помощью технического тормоза, так как катушка электромагнита тормозного устройства КМ5 в этом случае теряет питание.
Повторное включение электропривода в работу после срабатывания любого вида защит возможно только после установки командоконтроллёра в нулевое положение.
Это нулевая блокировка (защита от самозапуска):она исключает опасность самопроизвольного включения привода в работу после устранения неисправностей или восстановления питающего напряжения, если командоконтроллёр остался не в нулевом положении.
В цепи катушек контакторов направления КМ1 и КМ2 введены размыкающие контакты конечных выключателей SQ1 и SQ2, чтобы в случае, когда перемещаемый механизм выходит за допустимые границы перемещения, механизм специальным упором нажимает на рычаг конечного выключателя SQ1 или SQ2.Последний своим размыкающим контактом снимает питание с катушки соответствующего контактора направления, в результате двигатель отключается от сети. Одновременно снимается питание с катушки электромагнитного тормоза КМ5. При этом механизм фиксируется в неподвижном состоянии механическим тормозом.
Для осуществления электрического торможения типа В в схеме предусматриваем последовательное включение двух тормозных резисторов Rт1 и Rт2(для осуществления торможения устанавливаем параллельно резисторам размыкающий контакт КМ6:2, контактора КМ6). Тормозные резисторы устанавливаются в цепи якоря.
Список литературы
1.Чиликин М.Г., Ключев В.И. «Теория автоматизированного электропривода».М.:Энергия.1979
2.Чиликин М.Г., «Общий курс электропривода».М: Энергоиздат 1981
3.Методические указания по курсовому проектированию дисциплины «Автоматизированный электропривод». Бабокин Г.И., г.Новомосковск
4.Яуре А.С., Певзнер Е.М. «Крановой электропривод»
Похожие работы
... lдв - перегрузочная способность выбранного двигателя. 2. СИЛОВЫЕ ЭЛЕМЕНТЫ ЭЛЕКТРОПРИВОДА Основная задача второго этапа проектирования - выбор комплектного тиристорного электропривода из серии КТЭУ для подъемной установки, принятой на первом этапе проектирования. 2.1. Исходные данные для расчета динамики электропривода Двигатель Тип П2-800-255-8КУ4 Номинальная ...
... силовой преобразовательный агрегат, силовой трансформатор и реакторы, выполнить расчет элементов системы автоматического управления электроприводом, выполнить компьютерное моделирование системы автоматизированного электропривода в типовых режимах. Требования к электроприводу: 1. Обеспечение работы механизма по следующему циклу: • подход детали к резцу с пониженной скоростью; • ...
... числа редуктора Расчет передаточного числа редуктора выполняется так, чтобы максимальной скорости рабочего органа механизма соответствовала номинальная скорость двигателя. Для привода грузового лифта: Расчет и построение нагрузочной диаграммы двигателя Для проверки предварительно выбранного двигателя по нагреву выполним построение упрощенной нагрузочной диаграммы двигателя (т.е. ...
... требованиям по перегрузке. 2. Выбор системы управления 2.1 Технико-экономическое обоснование По кривым на рис. 1.3 [2] (с. 12) определяем, что для скорости передвижения тележки V=0.68 м/с и точности остановки v=20 мм требуется обеспечить диапазон регулирования D=1:10. Данному диапазону и установленной мощности электродвигателя удовлетворяют следующие системы управления [2] (табл. ...
0 комментариев