Навигация
Автоматизированный электропривод многоканатной подъемной установки
38433
знака
2
таблицы
9
изображений
1.РАСЧЕТ МЕХАНИЧЕСКОЙ ЧАСТИ ЭЛЕКТРОПРИВОДА_______ 3
1.1. Исходные данные для проектирования многоканатной ШПУ____ 3
1.2.Выбор скипа______________________________________________ 3
1.3.Выбор подъемных канатов__________________________________ 5
1.4.Выбор многоканатной подъемной машины____________________ 6
1.5.Условие нескольжения шкива по ведущему валу_______________ 7
1.6.Продолжительность подъемной операции_____________________ 8
1.7.Кинематика подъемной установки____________________________ 9
1.8. Динамика подъемной установки____________________________ 11
2. СИЛОВЫЕ ЭЛЕМЕНТЫ ЭЛЕКТРОПРИВОДА________________ 16
2.1. Исходные данные для расчета динамики электропривода______ 16
2.2. Выбор тиристорного преобразователя_______________________ 17
2.3. Выбор силового трансформатора___________________________ 18
2.4. Расчет сглаживающего реактора____________________________ 18
2.5. Расчет автоматического выключателя в якорной цепи_________ 21
2.6.Выбор тиристорного возбудителя___________________________ 21
2.7. Выбор тахогенератора в цепи ОС по скорости________________ 23
3. АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ЭЛЕКТРОПРИВОДОМ___ 24
3.1. Расчет системы подчиненного регулирования координат электропривода 25
3.2.Расчет контура регулирования тока возбуждения______________ 25
3.3. Расчет контура регулирования тока якорной цепи____________ 27
3.4. Расчет контура регулирования скорости_____________________ 30
4. Список используемой литературы____________________________ 35
1.РАСЧЕТ МЕХАНИЧЕСКОЙ ЧАСТИ ЭЛЕКТРОПРИВОДА
Основными параметрами механической части шахтной подъемной установки (ШПУ) являются такие величины, как оптимальная масса поднимаемого груза, диаметр головных и хвостовых канатов, оптимальные скорость, ускорение и замедление движения, эффективная мощность подъема. Расчет этих параметров и выбор соответствующих изделий - задача проектирования механической части ШПУ.
Технические решения, принятые по механической части ШПУ, служат основой для выбора той или иной системы электропривода. Этим завершается первый этап проектирования автоматизированного электропривода. Основная задача второго этапа проектирования - выбор комплектного тиристорного электропривода из серии КТЭУ для ШПУ, принятой на первом этапе проектирования. На основе технических решений, принятых на первом и втором этапах проектирования, выбирают регуляторы тока, скорости и другие технические средства, составляющие систему автоматического управления электроприводом «управляемый выпрямитель - двигатель» (УВ-Д).
1.1. Исходные данные для проектирования многоканатной ШПУГодовая проектная
производительность подъема: Аг=2345тыс.т/год
Глубина вертикального
ствола: Нст=1000м
Число рабочих дней в году: 300
Число часов работы в сутки: 18
Коэффициент резерва: 1,5
Диаграмма скорости: семипериодная.
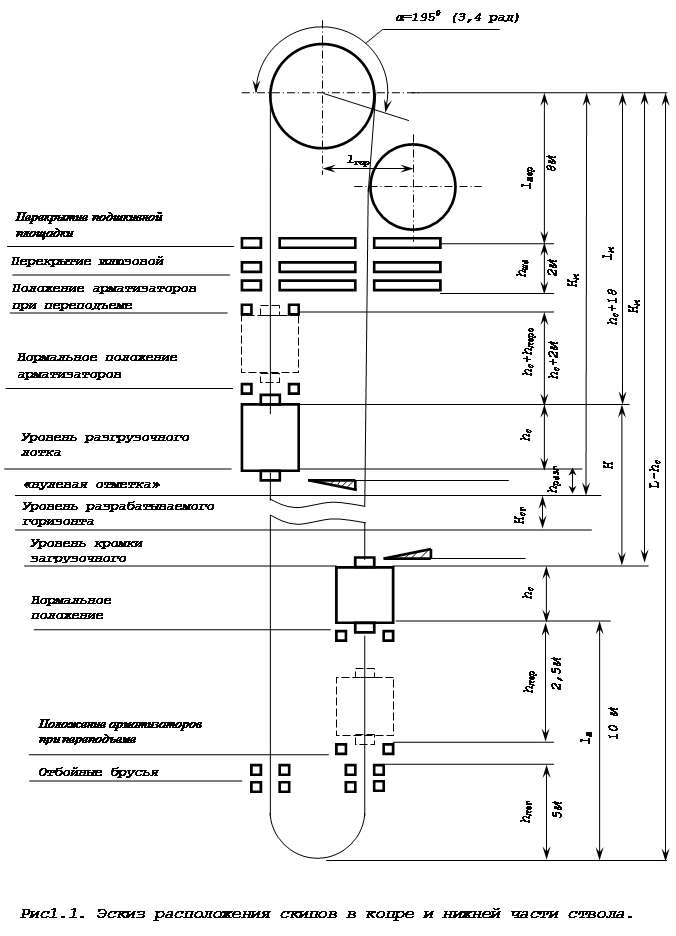
1.2.Выбор скипа1.2.1. Расчетная высота подъема с учетом расположения скипов в копре и нижней части ствола:
Нр=Нст+hзагр+hразгр+2×D=1000+30+35+2×0,35=1066 м, (1.1)
где Нст - глубина вертикального ствола;
hзагр - расстояние по вертикали от отметки откаточного горизонта до нижней кромки загрузочного бункера;
hразгр - расстояние по вертикали от «нулевой» отметки до верхней кромки приемного бункера.
![]()
1.2.2. Часовая производительность ШПУ:
![]() (1.2)
(1.2)
где Ач - часовая производительность ШПУ, т/ч;
Аг - годовая производительность ШПУ, т/год;
с - коэффициент резерва производительности (с=1,5);
nд - число рабочих дней в году;
t - время работы подъемной установки в сутки, ч.
1.2.3. Оптимальная грузоподъемность Qопт, кг, при которой суммарные годовые эксплуатационные затраты на подъемной установке будут минимальными, определяем по формуле для многоканатных двухскиповых подъемов:
![]() (1.3)
(1.3)
где Ач - часовая производительность, кг;
Нп - высота подъема, м;
tп - продолжительность паузы, с.
Выбираем стандартный скип 2СН11-2 грузоподъемностью Qп=25т, массой Qс=24,4 т, путем разгрузки h=2,4 м [1].
1.2.4. Высота подъема с учетом высоты скипа hс=13 м:
Н=Нр+hс=1066+13=1079 м. (1.4)
1.2.5. Расстояние от нижней приемной площадки до оси шкива трения:
Нк=Н+lк=1066+13+18=1097 м, (1.5)
где Н - высота подъема, м;
lк=hск+18 - длина отвесов подъемных канатов в копре, м (рис.1.1.).
1.3.Выбор подъемных канатов1.3.1. Линейную массу каната Pк, кг/м, определим по формуле:
![]()
![]()
 (1.6)
(1.6)
где Qп и Qс - масса полезного за один раз поднимаемого груза и собственная масса скипа, кг;
sв - временное сопротивление разрыву проволок каната Н/м2;
g=9,81м/с2;
zmin=4,5 - коэффициент запаса прочности;
rо - условная плотность каната, кг/м3;
Нк - расстояние от нижней приемной площадки до оси шкива трения, м.
1.3.2. Число подъемных канатов nк многоканатного подъема определили по формуле:
 (1.7)
(1.7)
где Рк - линейная масса канатов, кг/м;
Dшт - диаметр шкива трения, м;
jк - коэффициент, зависящий от конструкции каната;
y - отношение Dшт к диаметру каната dк, по ПБ для системы с отклоняющими канатами y³95.
Предварительно применим четыре каната nк=4, диаметром dк=46,5 мм, линейной массой каната Рк=8,4кг/м, разрывным усилием Qр=1330×103 Н [1].
1.3.3. Линейную массу gк уравновешивающих канатов определили по формуле:
![]() (1.8)
(1.8)
где nк - количество подъемных канатов;
Рк - линейная масса подъемного каната, кг/м;
nук - количество уравновешивающих канатов, которых по ПБ должно быть не менее двух.
Применили три стандартных плоских каната с размерами 170´27,5 мм расчетной массой gк=11,5 кг/м [1].
1.3.4. Разность линейных масс:
nкРк=nукgк ½4×8,4-3×11,2½=0,9 кг/м; (1.9)
Считаем предварительно выбранную систему уравновешенной.
1.4.Выбор многоканатной подъемной машиныНаметим к применению многоканатную подъемную машину ЦШ-5´4 со следующими техническими характеристиками:
Диаметром канатоведущего шкива D=5 м;
Количеством подъемных канатов n=4;
Статическим натяжением канатов 1450 кН;
Разностью статических натяжений канатов 350 кН;
Маховым моментом машины 6250 кН×м2;
Маховым моментом отклоняющих шкивов 500 кН×м2.
1.4.1. Фактические значения статических натяжений канатов и разности статических натяжений канатов рассчитаем по формулам:
Тст max=(Qп+Qс+РкНк)g=(25×103+24,4×103+4´8,4×1097)9,81=846×103 Н;
Тст=846×103 Н(факт)<1450×103Н(норма); (1.10)
Fст=[Qп+(Рк-q)Н]g=[25×103+(4×8,4-3×11,5)×1079]×9,81=236×103Н;
Fст=236×103Н(факт)<350×103Н(норма). (1.11)
1.4.2. Коэффициенты запаса прочности Zо и Zmin, рассчитаем по формулам:
![]() (1.12)
(1.12) ![]() =
=
=![]()
=6,3(факт)>4,5(нор), (1.13)
где Zо, Zmin - фактические значения коэффициентов запаса прочности;
Qп, Qс - масса полезного груза и масса сосуда, кг;
nк, nук - количество подъемных и уравновешивающих канатов;
Qр - суммарное разрывное усилие всех проволок каната, Н;
Рк, qк - линейная масса подъемного и уравновешивающего канатов, кг/м;
Нк - расстояние от нижней приемной площадки до оси канатов ведущего шкива, м;
lз - отвес уравновешивающих канатов в зумпфе, м.
Окончательно применим многоканатную машину типоразмера ЦШ-5´4, четыре подъемных каната типа ЛК-РО маркировочной группы 1568 диаметром 46,5 мм и три уравновешивающих каната размером 170´27,5 мм [1].
Техническая характеристика машины ЦШ-5´4:
Диаметр канатоведущего шкива Dш=5 м;
Количество подъемных канатов nк=4;
Маховый момент машины GD2м=6250 кН×м2;
Маховый момент отклоняющих шкивов GD2ош=500 кН×м2;
1.5.Условие нескольжения шкива по ведущему валу1.5.1. Статический коэффициент безопасности Ксб рассчитываем по
формуле :
![]() (1.14)
(1.14)
![]() 3,3(факт)>2(норма),
3,3(факт)>2(норма),
где Fст max=(Qп+Qс+pH+c)g - наибольшее возможное натяжение одной ветви каната, охватывающего ведущий шкив, Н;
Fст min=(Qс+qH-c)g - наименьшее натяжение другой ветви каната;
е - основание натурального логарифма;
f - коэффициент трения между канатами и футеровкой ведущего шкива;
a - угол охвата ведущего шкива, рад;
с=![]() - сопротивление движению одной ветви каната;
- сопротивление движению одной ветви каната;
к=1,1 - для скипового подъема [1].
Похожие работы
... от переподъемов, нулевую и максимальную защиты. - предусматривать остановку сосудов в промежуточных точках ствола. световую сигнализацию о режимах работы подъемной установки в здании подъемной машины, у оператора загрузочного устройства, у диспетчера. Современные регулируемые электроприводы постоянного тока для автоматизированных подъемных установок выполняют на основе двигателей постоянного ...
... 284 Объектом курсового проектирования является двухскиповая подъемная установка главного ствола. Целью курсового проектирования является автоматизация подъемной скиповой установки с асинхронным приводом. 1.1. Общие требования к аппаратуре ...
... ; защита отходящих линий - от утечки тока на землю, от короткого замыкания. 1.7 Поверхностный комплекс рудника В поверхностный комплекс рудника входят: склад взрывчатых материалов, компрессорная, котельная, здания подъемных машин шахт "Тишинская", "Ульбинская", "Западная", "Вентиляционная", надшахтные здания "Тишинская" и "Ульбинская", здания вентиляционных установок "Западная", "Ульбинская ...
... (от передвижения источников загрязнения) 1180,48 Всего за год: 211845,25 10. Совершенствование системы электроснабжения подземных потребителей шахты Расчет схемы электроснабжения ЦПП до участка и выбор фазокомпенсирующих устройств Основными задачами эксплуатации современных систем электроснабжения горных предприятий являются правильное определение электриче ...
0 комментариев