Обзор отечественных разработок
Анализ дестабилизирующих факторов
Основные технические параметры
Выбор материалов конструкций
Выбор и обоснование компоновочной схемы, методов и
Задаемся вероятностью правильного расчета р
Выбор способов и методов герметизации
Выбор способов и методов виброзащиты
Расчет теплового режима блока управления электромеханического замка
Расчет конструктивно-технологических параметров
Полный расчет надежности
Расчет технологичности изделия
Обоснование выбора средств автоматизированного проектирования
Мероприятия по защите от коррозии, влаги, электрического удара, электромагнитных полей и механических нагрузок
Защита от электрического удара
Навигация
Расчет конструктивно-технологических параметров
Разработка блока управления электромеханическим замком
129657
знаков
12
таблиц
1
изображение
6.3.2 Расчет конструктивно-технологических параметров
печатного монтажа
В данном разделе проводится расчет параметров печатного монтажа платы базового модуля. Двусторонняя печатная плата изготавливается комбинированным позитивным методом и имеет 3-й класс точности.
Рассчитаем проводящий рисунок печатной платы.
Исходные данные:
- размеры платы, мм, 140´120
- проводники на плате имеют покрытие сплавом «Розе».
Определим минимальный диаметр контактной площадки для отверстия под резисторы, расположенные на двухсторонней печатной плате второго класса точности.
Расчетная формула минимального диаметра контактной площадки имеет вид:
![]() , (6.3.2.1)
, (6.3.2.1)
где ![]() - номинальный диаметр металлизированного отверстия, равный 0.8мм;
- номинальный диаметр металлизированного отверстия, равный 0.8мм;
![]() - верхнее отклонение диаметра отверстия, равное 0мм при диаметре отверстия до 1мм (включительно) и 0,05мм при диаметре отверстия более 1мм;
- верхнее отклонение диаметра отверстия, равное 0мм при диаметре отверстия до 1мм (включительно) и 0,05мм при диаметре отверстия более 1мм;
![]() - величина гарантийного пояска, равная 0,1мм;
- величина гарантийного пояска, равная 0,1мм;
![]() - верхнее отклонение ширины проводника равное 0,1мм;
- верхнее отклонение ширины проводника равное 0,1мм;
![]() - диаметральное значение позиционного допуска расположения центра отверстия относительно номинального положения узла координатной сетки, равное 0,08мм;
- диаметральное значение позиционного допуска расположения центра отверстия относительно номинального положения узла координатной сетки, равное 0,08мм;
![]() - диаметральное значение позиционного допуска расположения контактной площадки относительно его номинального расположения, равное 0,15мм;
- диаметральное значение позиционного допуска расположения контактной площадки относительно его номинального расположения, равное 0,15мм;
![]() - нижнее предельное отклонение ширины проводника, равное 0.1мм.
- нижнее предельное отклонение ширины проводника, равное 0.1мм.
Подставляя численные значения в формулу, имеем:
D=(0,8 + 0) + 2 × 0,1 + 0,1 + (0,082 + 0,152 + 0,12)0.5=1,297 (мм).
Таким образом, минимальный диаметр контактных площадок для металлизированных отверстий диаметром 0,8мм под выводы резисторов типа С2-23‑0.125, конденсаторов и д.р. равен 1,297мм.
Аналогично проводим расчет контактных площадок для отверстий диаметром 0,9; 1 и 1,2мм. Получаем диаметры контактных площадок 1,397; 1,497 и 1,747мм соответственно.
Проведем расчет платы базового модуля по постоянному току.
В результате расчета необходимо оценить наиболее важные электрические свойства печатной платы:
- нагрузочная способность проводников;
- сопротивление изоляции;
- диэлектрическая прочность основания платы.
Исходные данные для расчета:
- номинальное напряжение питания Uпит, В: 15![]() 10%
10%
- допустимое падение напряжения в цепях питания Uпд,В: 1,5
- ток потребляемый всеми элементами, установленными на плате, I, А: 1,5
- максимальная длина печатного проводника для микросхем, L, м: 0.3
- толщина фольги печатной платы, h, м: 3.5×10-5
- удельное сопротивление проводника на печатной плате,![]() , Ом×м: 1.72×10-8
, Ом×м: 1.72×10-8
Определим минимальную ширину проводника для выбранных выше значений по формуле:
 (6.3.2.2)
(6.3.2.2)
 м.
м.
Таким образом, для нормальной работы устройства ширина печатного проводника в цепях «питания» и «земли» должна быть не менее 1,5×10-4м. Указанные цепи целесообразно выбрать шириной порядка 2мм.
Результаты расчета свидетельствуют о правильности выбора толщины фольги-, равной 35мкм. Толщина фольги выбиралась также с учетом максимальной адгезионной прочности печатной платы при расстоянии между печатными проводниками порядка 0.3...0.5мм максимально допустимое напряжение для текстолита, из которого изготовлена плата составляет не менее 50В. В данной принципиальной схеме модуля питания максимальное значение допустимого напряжения не превышает 15В, что более чем в 3 раза ниже допустимой величины. Таким образом, в разрабатываемой конструкции печатной платы обеспечивается с 3‑х кратным запасом диэлектрическая прочность основания платы.
6.4 Расчет механической прочности и системы виброударной защиты
Все виды РЭС подвергаются воздействию внешних механических нагрузок, которые передаются к каждой детали, входящей в конструкцию. Механические воздействия имеют место в работающей РЭС, если она установлена на подвижном объекте, или только при транспортировке ее в нерабочем состоянии, как в случае стационарной и некоторых видов возимой РЭС. При разработке конструкции РЭС необходимо обеспечить требуемую жесткость и механическую прочность элементов.
Под прочностью конструкции понимают нагрузку, которую может выдержать конструкция без остаточной деформации или разрушения. Повышение прочности конструкции достигается усилием конструктивной основы: контроля болтовых соединений, повышение прочности узлов методами заливки и обволакивания. Во всех случаях нельзя допустить образование механической колебательной системы.
Так как создаваемый прибор относится к наземной РЭС, то при транспортировке, случайных падениях и т.п. он может подвергаться динамическим воздействиям. Изменения обобщенных параметров механических воздействий на наземную РЭА находятся в пределах:
- Вибрации: (10...70)Гц, виброперегрузка n=(1...4)g;
- Ударные сотрясения: ny=(10...15)g, длительность t=(5...10)мс;
- Линейные перегрузки: nл=(2...4)g.
Несущие конструкции типа плат, панелей, шасси, каркасов, стоек и рам, работающие в условиях вибраций, должны удовлетворять требованию вибропрочности.
Расчет на вибропрочность несущих конструкций типа плат сводится к определению наибольших напряжений исходя из вида деформации, вызванной действием вибраций в определенном диапазоне частот, и сравнением полученных значений с допустимыми.
Этот расчет можно свести к нахождению собственной частоты колебаний ¦, при которой плата с определенными размерами и механическими характеристиками имеет прогибы и напряжения в пределах допустимых значений. При этом частота колебаний платы не должна быть близка к ее резонансной частоте.
Для расчета частоты собственных колебаний платы с расположенными на ней ЭРЭ существенным является выбор характера ее закрепления по контуру.
Крепление пластин к опоре может быть жёстким или подвижным. Всякое закрепление (когда нет угловых и линейных перемещении) соответствует сварке, пайке, прижиму или закреплению винтами. Шарнирной опоре соответствует закрепление в направляющих и в некоторых случаях закрепление винтами или разъемом.
Используя эти данные, проведем проверочный расчет платы блока управления на виброустойчивость. Печатная плата должна обладать значительной усталостной долговечностью при воздействии вибрации.
Собственная частота колебаний монтажных плат с распределённой нагрузкой определяется по формуле:
![]() , (6.4.1)
, (6.4.1)
где ![]() - коэффициент, зависящий от способа закрепления, определяется по таблицам;
- коэффициент, зависящий от способа закрепления, определяется по таблицам;
D - цилиндрическая жёсткость пластины (платы), определяется
по формуле (6.4);
а - длина пластины (платы);
b - ширина пластины (платы);
М - масса пластины (плат с ЭРЭ).
Цилиндрическая жёсткость пластины (платы) определяется по формулам:
![]() , (6.4.2)
, (6.4.2)
где E – модуль упругости;
h – толщина пластины (плат);
![]() – коэффициент Пуассона;
– коэффициент Пуассона;
Для инженерных расчётов более удобно при закреплении пластин (плат) по углам в четырёх точках собственную частоту определять по формуле:
 , (6.4.3)
, (6.4.3)
Методика такого расчёта приведена в [10].
При определении собственной частоты платы базового модуля блока управления в первую очередь определим цилиндрическую жёсткость платы по формуле (6.4.2), подставив следующие исходные данные: h = 1,5 · 10![]() м; E= 3,02 · 10
м; E= 3,02 · 10![]() Па ( Е выбрали из таблицы 4.16[10]).
Па ( Е выбрали из таблицы 4.16[10]).
D = 3,02 · 10![]() · (1,5 · 10
· (1,5 · 10![]() )
)![]() / 12 · (1 – 0,222) = 8,926 Па.
/ 12 · (1 – 0,222) = 8,926 Па.
Теперь no формуле (6.4.3) определим собственную частоту, подставив следующие исходные данные: а = 0.14 м; b=0.12 м и М = 0.55 кг.
 = 95,1 Гц
= 95,1 Гц
Судя по условиям эксплуатации и особенностям блока управления следует отметить, что в использовании демпферов и частотной отстройки, конструкция не нуждается.
Таким образом расчет показал, что плата базового модуля электромеханического замка будет обладать достаточной усталостной долговечностью при воздействии вибрации.
Похожие работы
... переговорные (аудио) видеоустройства. Системы серии PERCoMS400 могут использоваться в сочетании с более сложными системами контроля и управления доступом. При этом одни и те же карточки могут служить пропусками на все разрешенные к доступу объекты. Максимальное число пользователей для систем PERCoMS400 составляет примерно 500 человек. В настоящее время серия PERCoMS400 имеет несколько моделей. ...
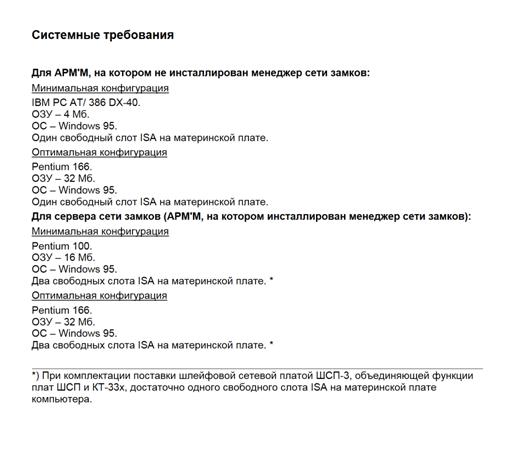
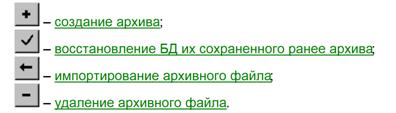
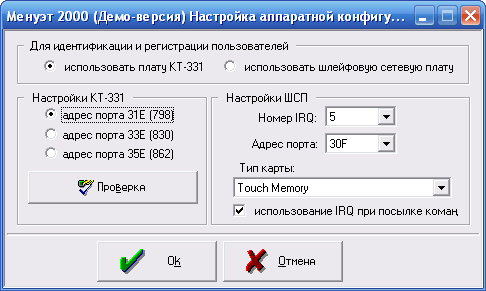
... без сохранения воспользуйтесь кнопкой Отмена или закройте окно стандартным для Windows приемом. Примечание. 1. Программы-архиваторы в состав программно-аппаратного комплекса Менуэт 2000 не входят и для поддержания возможности создания архивов баз данных регистрации и объектов контроля Вы должны позаботиться о наличии на жестких дисках АРМ'М, на которых инсталлированы модули ПАК Менуэт 2000 ...
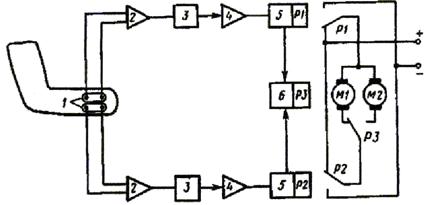
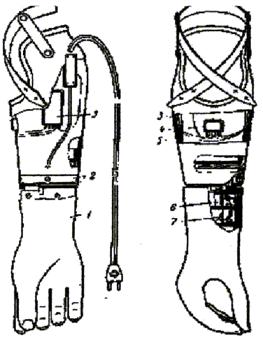
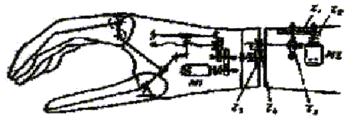
... электродвигатель. Редуктор состоит из двух ступеней зубчатой передачи Zi и Z2 (рис. 3), самотормозящейся винтовой пары Z3 и зубчатой передачи с внутренним зацеплением Z4,Z5. Рис. 2 Протез предплечья с биоэлектрическим управлением с двумя функциями Максимальный вращающий момент привода составляет 0,5 - 5 Н*м; число поворотов — не менее 15 об/мин; масса протеза не превышает 1,2 кг. Рис. ...
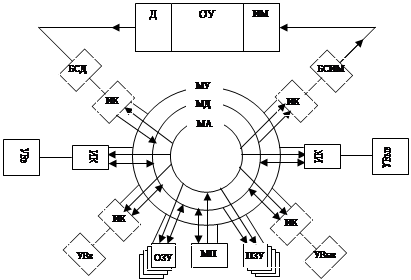
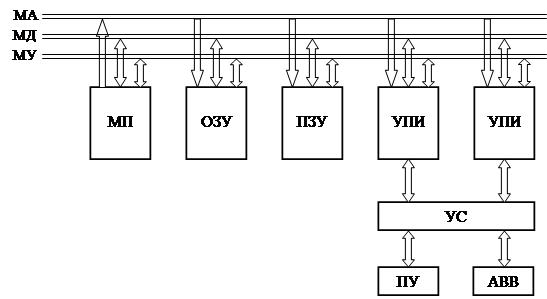
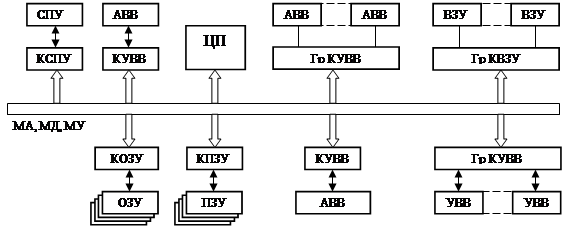
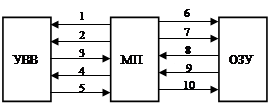
... ввести распределенную обработку во всех подсистемах вычислительной системы, что определяет новые способы организации вычислительных процессов в системах с децентрализованными управлением и обработкой информации. 2. Интерфейс микропроцессоров Для включения микропроцессора в любую микропроцессорную систему необходимо установить единые принципы и средства его сопряжения с остальными устройствами ...
0 комментариев