Анализ переходных процессов в манипуляторе МРЛ-901П
Определение жесткости звеньев манипулятора МРЛ-901П
Методика проведения эксперимента по определению механических характеристик манипулятора МРЛ-901П
Время перемещения рабочего органа манипулятора при малых расстояниях между рабочими точками
Программные средства для исследования динамической модели портального манипулятора
Навигация
Анализ переходных процессов в манипуляторе МРЛ-901П
Модель портального манипулятора
38016
знаков
70
таблиц
39
изображений
2.2 Анализ переходных процессов в манипуляторе МРЛ-901П
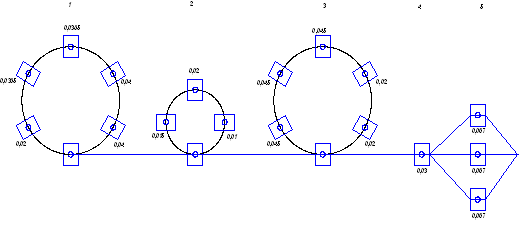
Источниками возникновения переходных процессов в манипуляторе МРЛ-901П являются: зубчатая ременная передача линейного модуля манипулятора и его свободная консоль.
На этапе зондирующих экспериментов исследовались парные зависимости коэффициента демпфирования от натяжения зубчатого ремня и смещения рабочего органа вдоль консоли. Результаты анализа полученных осциллограмм сведены в таблицы 2.1 и 2.2.
Анализ результатов показывает, что натяжение зубчатого ремня существенным образом влияет на коэффициенты демпфирования модуля линейного перемещения: так при увеличении начального натяжения ремня от минимального значения h = 0,03778 до максимального h = 0,00667 (в исследуемых приделах) коэффициент демпфирования уменьшается в 3 раза. Таким образом, можно сделать вывод о том, что демпфирование линейного модуля с зубчатой ременной передачей может задаваться и варьироваться в широких пределах, как на этапе конструирования, так и в процессе его эксплуатации.
| Табл. 2.1 | |||||
| Результаты анализа осциллограмм собственных колебаний рабочего органа манипулятора МРЛ-901П на консоли | |||||
| Величина смещения рабочего органа вдоль консоли ly, мм | Период колебаний рабочего органа T, с. | Частота колебаний w, с-1 | Логарифмический декремент затухания n | Коэффициент демпфирования b, кг/c | Время затухания колебаний tп.п., с. |
| 0 | 0,057 | 17,54 | 0,956 | 369 | 0,6 |
| 175 | 0,067 | 15 | 0,693 | 227,55 | 0,9 |
| 350 | 0,08 | 12,5 | 0,446 | 122,65 | 1,2 |
Анализ результатов исследований показывает, что смещение рабочего органа манипулятора МРЛ-901П вдоль свободной консоли, также как и увеличение начального натяжения ремня, вызывает уменьшение коэффициентов демпфирования, что существенно (в 2…3 раза) увеличивает время полного затухания собственных колебаний рабочего органа (см. табл. 2.1 и 2.2), и, как следствие снижает реальную производительность.
Смещение рабочего органа относительно основания и увеличение натяжения ремня приводит также к уменьшению частоты собственных колебаний манипулятора, что должно учитываться при использовании его в технологических процессах, связанных с резонансными явлениями.
Комплексные исследования демпфирующих свойств манипулятора осуществлялись с целью установления численной зависимости коэффициента демпфирования от величины начального натяжения ремня и смещения рабочего органа вдоль консоли. В качестве функции отклика выбиралась линейная модель. База данных для построения плана экспериментов сведена в табл. 2.
Основные уровни и интервалы варьирования выбирались на основе результатов зондирующих экспериментов, а также исследований жесткости и точносных параметров манипулятора МРЛ-901П.
| Табл. 2.3 | ||||
| База данных для построения плана экспериментов | ||||
| Наименование фактора | Условное обозначение | Область определения | Основной уровень | Интервал варьирования |
| Начальное натяжение ремня h | X1 | 0...0,04 | 0,02 | 0,013 |
| Величина смещения рабочего органа манипулятора вдоль консоли ly, мм | X2 | 0...350 | 175 | 175 |
Матрица планирования и результаты экспериментов сведены в табл. 2.4.
Проводилась полная статистическая обработка результатов экспериментов, позволившая получить адекватную модель зависимости коэффициентов демпфирования от исследуемых факторов в виде:
|
| (2.34) |
Поверхность отклика представлена на рис. 2.2. Выражение (2.34) позволяет получить численное значение коэффициента демпфирования, необходимое для расчета продолжительности переходного процесса при позиционировании.
| Табл. 2.4 | ||||||||
| Матрица планирования и результатов экспериментов по комплексному исследованию демпфирующих свойств манипулятора МРЛ-901П | ||||||||
| Номер опыта |
|
|
|
| Среднее значение коэффициента демпфирования, кг/c | Дисперсия среднего арифметического | Вычисленное значение | |
| 1 | +1 | +1 | +1 | +1 | 240 | 64 | 240 | |
| 2 | +1 | +1 | -1 | -1 | 700 | 49 | 700 | |
| 3 | +1 | -1 | +1 | -1 | 65 | 4 | 65 | |
| 4 | +1 | -1 | -1 | +1 | 157 | 16 | 157 | |
Экспериментальные исследования времени переходного процесса осуществлялись при помощи комплекта виброизмерительной аппаратуры АВ-44, вибродатчик которой крепился на рабочем органе манипулятора.
Похожие работы
... к точности, хотя это уменьшение весьма не значительное. 4.Программные средства для исследования динамической модели портального манипулятора 4.1 Программа для вычисления параметров переходного процесса портального манипулятора Для исследования полученной динамической модели, построения графиков приведенных в работе, использовалась программа “Модель портального манипулятора МРЛ-901П в момент ...

... проектировании. В курсовом проекте необходимо совершенствовать технологический процесс механической обработки детали 245.2303018 Коробка дифференциала с программой выпуска 10000 штук в год. 2. Технологический раздел. 2.1.Определение типа производства В машиностроении в зависимости от программы выпуска изделий и характера изготовляемой продукции различают три основных типа производства ...

... 500 - 100 0,2 шлифовальная Шлифовать пов. 6 Круг СМ1 0,4 - - 300 6,0 14 24 1,6 Шлифовать торец 14 Круг СМ1 0,4 - - 300 6,0 18 109 1,6 В данной работе предлагается разработка автоматической линии для осуществления той части техпроцесса, которая связана с обработкой отверстий и фрезерованием канавок. Таким образом, для данной линии не учитываются токарные и шлифовальные ...
... в таблицу 3.1. Учитывая, что в машине два мотора и рассматривая прямолинейное движение, результаты и нужно удвоить. На основании таблицы 3.1 строим график, изображенный на рисунке 3.1. колесный сотриментовоз комбинированная трансмиссия Таблица 3.1. Изменение давления в зависимости от изменения производительности насоса при n=2000 об/мин 0 13 26 39 52 65 78 91 117 130 ...
0 комментариев