Навигация
Интерферометр со счетом полос на основе частотной модуляции
16839
знаков
4
таблицы
3
изображения
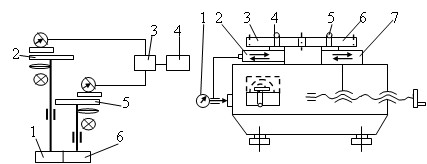
2.2 Интерферометр со счетом полос на основе частотной модуляции
На рис. 3а приведен пример схемы ЛИС. Двухчастотный лазер 1
излучает две волны с частотами ?1 и ?2, одна из которых поляризо-
вана параллельно, а другая - перпендикулярно плоскости чертежа.
Светоделитель 2 отклоняет часть излучения каждой частоты для фор-
мирования опорного сигнала I0. Поляризационная призма-куб 3 раз-
деляет составляющие излучения разных частот и направляет их в
разные плечи интерферометра. Пластины ?/4 - позиция 7, оптические
оси которых составляют угол 450 с плоскостью чертежа, меняют сос-
тояние поляризации дважды прошедших пучков на ортогональное. По-
ляризационная призма-куб 3 обеспечивает суперпозицию пучков,
возвращенных отражателями 4 и 5, в направлении I1. После поляри-
заторов 6, ось пропускания которых составляет угол 450 с плос-
костью чертежа, в результате интерференции пучков с разными час-
тотами образуются опорный I0 и измерительный I1 сигналы биения.
Поскольку номенклатура двухчастотных лазеров и значения раз-
ности частот, которые они обеспечивают, ограничены, в качестве
источника излучения часто используют одночастотный лазер, сдвигая
частоты ортогональных составляющих его излучения акустооптически-
ми модуляторами, которые устанавливают на входе, выходе или в од-
ном из плечей интерферометра . В этом случае опорный сигнал
I0 может быть получен непосредственно из модулирующих сигналов,
подаваемых на акустооптические модуляторы.
Частота частотной модуляции, аналогично частоте фазовой модуляции, ограничивает время измерения . Однако при использовании акустооптических модуляторов она может быть установлена достаточно большой, чтобы этим ограничением можно было пренебречь. Тогда время однократного измерения фазы определяется временем задержки фазоизмерительного устройства и составляет для современных ЛИС около 10 мкс .
Так как ЛИС на основе частотной модуляции обеспечивают время измерения на порядок меньше, чем ЛИС на основе фазовой модуляции,
допустимые скорости изменения ГРХ в них на порядок выше. Эти ЛИС
считаются в большей степени подходящими для высокоточных измерений в реальном масштабе времени . При равной погрешности они имеют несколько больший диапазон измерения ГРХ.
На основе методов прямого измерения фазы разрабатывают ЛИС для измерения медленно меняющихся во времени и незначительных по величине расстояний с высокой точностью. Основная область применения таких ЛИС - контроль профиля и шероховатости поверхностей, в том числе оптических. Другая обширная сфера применения - интерференционные датчики физических величин, изменение которых можно преобразовать в изменение еометрической или оптической разности хода интерферирующих лучей (давление и влажность атмосферы, температура, напряженность электрического и магнитного полей и др.).
Частотную модуляцию интерференционного сигнала обеспечивают путем суперпозиции двух волн разной оптической частоты. В этом случае закон изменения интенсивности имеет вид
![]() (4)
(4)
где I1 и I2 - интенсивности, ?1 и ?2 - оптические частоты, ?1 и ?2 - фазы интерферирующих волн.
Все переменные составляющие сигнала (4), кроме последней, вследствие высокой частоты не могут быть детектированы фотоприемником непосредственно.
Выбирая близкие оптические частоты интерферирующих волн, получают частоту ?b=??1-??2 последней составляющей, удобную для обработки в фотоэлектронной системе. Эту частоту называют сигналом биения.
Особенность сигнала биения в том, что даже в отсутствие изменения ГРХ между интерферирующими волнами интенсивность изменяется по гармоническому закону. Если одна из интерферирующих волн проходит дополнительный геометрический путь 2L, то сигнал биения получает дополнительный фазовый сдвиг ?=??L/?, эквивалентный фазе немодулированного интерференционного сигнала на длине волны ? при
ГРХ интерферирующих лучей, равной 2L.
Чтобы определить ГРХ, измеряют фазовый сдвиг (рис. 3б)
?(t)=???t*?b
между опорным и измерительным сигналами биения:
I0(t)=A0 *COS[2?(?1-??2)t+(?1-?2)] ,
(5)
I1(t)=A1 *COS[2?(?1-??2)t+(?1-?2)+??(t)] ,
где A0 и A1 - их амплитуды.
Вместо непрерывного измерения разности фаз между сигналами
подсчитывают число биений каждого из них N0 и N1 и отслежи-
вают разность ?N=N1-N0 (рис. 3в). Если ГРХ в интерферометре не
меняется, частоты опорного и измерительного сигналов равны
f?=f1=??1???2, и ?N=0. При движении отражателя 4 частота биения
измерительного сигнала становится равной f1=??1-??2+??, где
??=??(t) /??t. Изменение ГРХ равно ??L=?????=(N1-N0)*?.
Знак при ?n зависит от направления движения отражателя 4.
Связь между знаками ?L и ??? остается однозначной до тех пор, пока
[???]<[??1-??2]. Чтобы исключить влияние низкочастотных шумов на ра-
боту ЛИС, обеспечивают ¦???¦<[??1-??3]+??ш, где ?ш - верхняя гранич-
ная частота шумов. Таким образом, в ЛИС со счетом полос на основе
частотной модуляции имеет место принципиальное ограничение ско-
рости изменения измеряемых расстояний. В современных ЛИС она не
превышает 1 м/с.
При счете числа биений сигналов дискрета измерения при-
ращений ГРХ равна ?. Для повышения точности измерения уменьшают
дискрету счета, умножая частоты этих сигналов в электронной сис-
теме. Чаще всего обеспечивают дискрету ?/64 .
Метод счета полос на основе частотной модуляции, также как и
на основе квадратурных интерференционных сигналов, не ограничива-
ет максимальное значение измеряемых расстояниий, которые в из-
вестных ЛИС достигают 100 м.
ЛИС со счетом полос применяют для измерения больших расстоя-
ний и быстрых линейных перемещений с интерференционной точностью.
Благодаря достигнутому уровню технических характеристик и высокой
надежности они находят широкое применение в метрологии (аттеста-
ция станков и технологического оборудования, поверка вновь разра-
батываемых интрументов измерения расстояний и т.д.). Очень перс-
пективная область их применения - преобразователи линейных пере-
мещений координатно-измерительных систем станков и технологичес-
кого оборудования.
Похожие работы
.............................................................................15 СПИСОК ЛИТЕРАТУРЫ ....................................................................................25 1. Принципы измерения расстояний и линейных перемещений Обобщенная схема измерения расстояний и линейных перемещений посредством ЛИС на основе двухлучевого интерферометра изображена на рис. 1а. Рассматривая ...
... грамматик предложения, описывающие границу данного объекта. Данный метод положительно работает при описании скелета области в базе данных эталонных объектов в виде одного или нескольких предложений. Приведённые методы распознавания и идентификации находят своё применение в различных системах технического зрения. Они предоставляют возможности создавать гибкие перепрограммируемые или самообучаемые ...
... области с одним набором свойств в другую область с другим набором свойств. Для системы координат, не включающей в себя компактифицированные измерения, свойства пространства в атоме изменяются скачкообразно и перемещение электрона с орбиты на орбиту видится также скачкообразным. Однако, в системе координат, включающей в себя компактифицированные измерения, дискретность исчезает. Например, можно ...
... угла от эталонов к образцовым и рабочим угловым мерам, поверки и градуировки угломерных приборов и специальных угловых мер (шаблонов), а также для непосредственного измерения угловых изделий. По ГОСТу 2875 - 88 "Меры плоского угла призматические. Общие технические условия" предусмотрено пять типов угловых мер (рис. 4.20): меры типа 1 выполнены со срезанной вершиной угла и имеют малые (до 9о) ...
0 комментариев