Навигация
Автоматизированный электропривод
9737
знаков
3
таблицы
16
изображений
Федеральное агентство по образованию и науке РФ
Брянский государственный технический университет
Кафедра
"Автоматизированный электропривод"
Пояснительная записка
к курсовой работе по ТАУ
Студент гр.05ПЭ:
Фролов С.В.
Преподаватель:
Зотин Д.В.
Брянск 2008
Содержание
1. Введение
2. Расчет коэффициента усиления САУ
3. Расчет и построение внешних статических характеристик САУ
4. Определение передаточной функции исходной САУ, расчет корней характеристического уравнения
5. Расчет и построение частотных характеристик эквивалентной разомкнутой САУ: АФЧХ, ЛАЧХ и ЛФЧХ
6. Моделирование переходных характеристик исходной САУ
7. Проверка на устойчивость исходной САУ по критерию Гурвица
8. Синтез корректирующего устройства
9. Моделирование переходных процессов в скорректированной САУ. Определение типовых показателей качества в динамике
10. Заключение
11. Литература
Введение
Курсовая работа является одним из этапов изучения дисциплины "Теория автоматического управления" и имеет своей целью приобретение навыков расчета параметров элементов систем автоматического управления (САУ) и анализа их характеристик.
Данная работа предусматривает возможность практического применения знаний, полученных на лекциях и в процессе самостоятельной подготовки. При выполнении курсовой работы необходимо решить ряд задач, тематика которых отражает основные разделы изучаемой дисциплины.
1. Расчет коэффициента усиления САУ
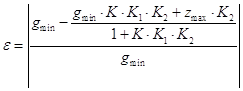
Рассчитаем коэффициент усиления К САУ, при котором суммарная статическая ошибка ![]() не будет превышать допустимой величины.
не будет превышать допустимой величины.
Кроме коэффициента усиления на величину ошибки ![]() влияют значения управляющего и возмущающего воздействий. Наибольшая величина
влияют значения управляющего и возмущающего воздействий. Наибольшая величина ![]() достигается при действии на систему минимального управляющего воздействия g и максимального возмущения z. Таким образом, при единичном коэффициенте передачи цепи обратной связи исходной системы суммарная статическая ошибка может быть найдена как:
достигается при действии на систему минимального управляющего воздействия g и максимального возмущения z. Таким образом, при единичном коэффициенте передачи цепи обратной связи исходной системы суммарная статическая ошибка может быть найдена как:
![]()
 ,
,
где y- выходная переменная.
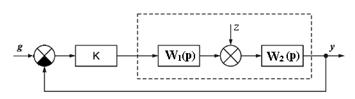
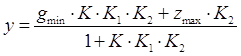
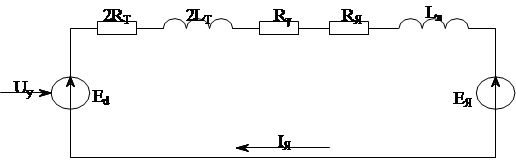
Значение y определяется реакцией САУ на сумму управляющего и возмущающего воздействий:
![]()
где K1, K2 – статические коэффициенты передачи соответственно звена W1(p) и W2(p).
![]()
![]()
Выражаем из (2) у:
![]()
![]()
Подставим полученное значение в (1):
Подставим числовые значения и найдем значение К.
![]()
K=233,891 - коэффициент усиления регулятора.
2. Расчет и построение внешних статических характеристик САУ
Построим семейства внешних статических характеристик для замкнутой САУ в заданном диапазоне g и z. Аналитически характеристики заданы уравнением:
![]() .
. ![]()
![]()
Подставим численные значения:
![]()
выполняем расчет для gmin=0.5:
| | z | | y |
| 0 | 0,5 |
| 9 | 0,487 |
выполняем расчет для g=3,25:
| | z | | y |
| 0 | 3,25 |
| 9 | 3,236 |
выполняем расчет для gmax=6:
| | z | | y |
| 0 | 6 |
| 9 | 5,985 |
Теперь найдем статические ошибки для каждого задающего воздействия g:
![]() %
%
gmin=0,5 ![]()
g=3,25 ![]()
gmax=6 ![]()
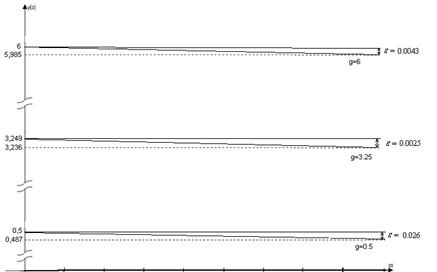
Рис.1 График семейства статических характеристик
Статическая ошибка максимальна (![]() =2.6% ) при задающем воздействии g=0.5.
=2.6% ) при задающем воздействии g=0.5.
Похожие работы
... lдв - перегрузочная способность выбранного двигателя. 2. СИЛОВЫЕ ЭЛЕМЕНТЫ ЭЛЕКТРОПРИВОДА Основная задача второго этапа проектирования - выбор комплектного тиристорного электропривода из серии КТЭУ для подъемной установки, принятой на первом этапе проектирования. 2.1. Исходные данные для расчета динамики электропривода Двигатель Тип П2-800-255-8КУ4 Номинальная ...
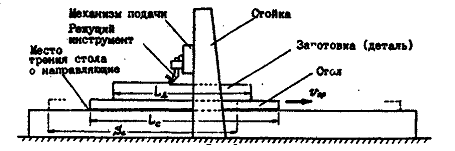
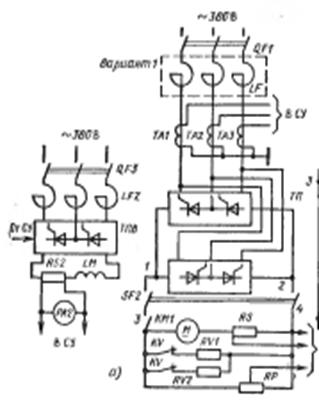
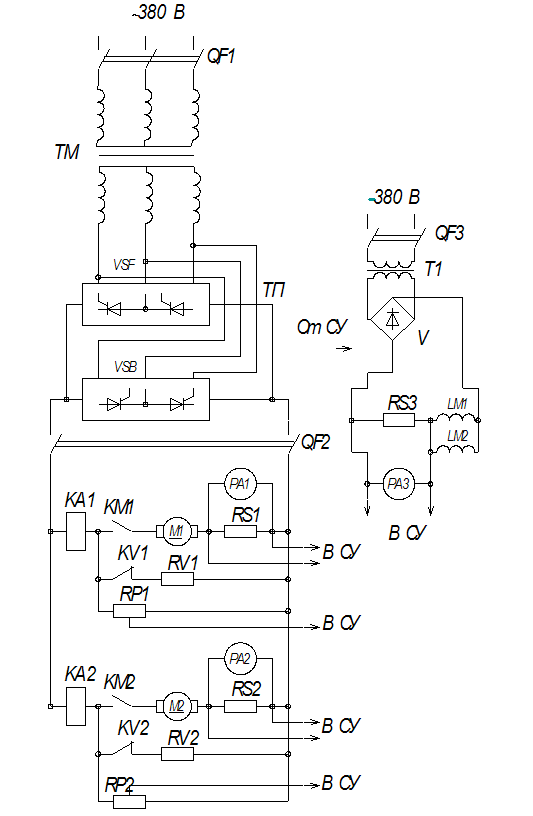
... силовой преобразовательный агрегат, силовой трансформатор и реакторы, выполнить расчет элементов системы автоматического управления электроприводом, выполнить компьютерное моделирование системы автоматизированного электропривода в типовых режимах. Требования к электроприводу: 1. Обеспечение работы механизма по следующему циклу: • подход детали к резцу с пониженной скоростью; • ...
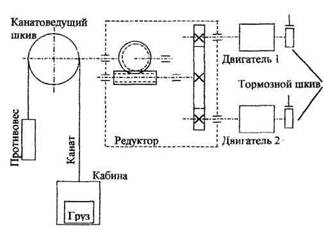
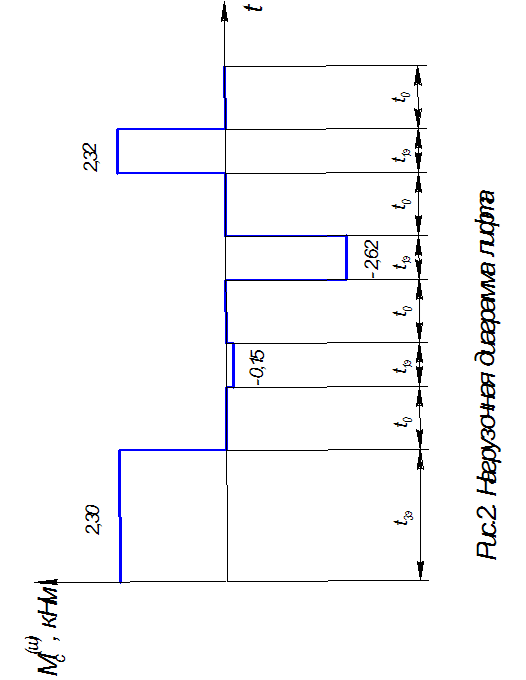
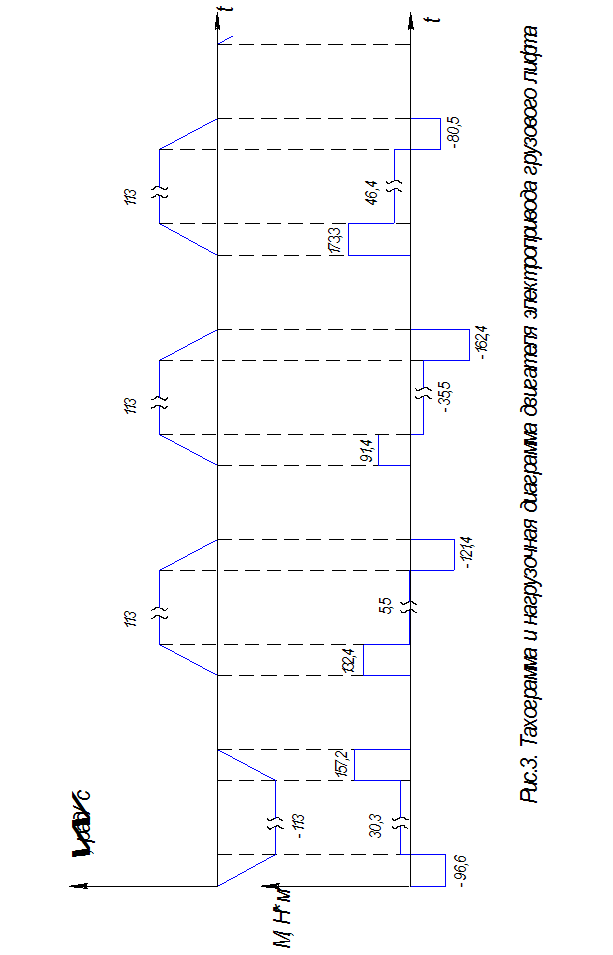
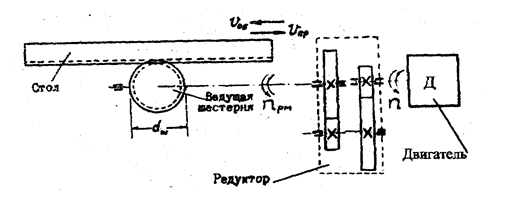
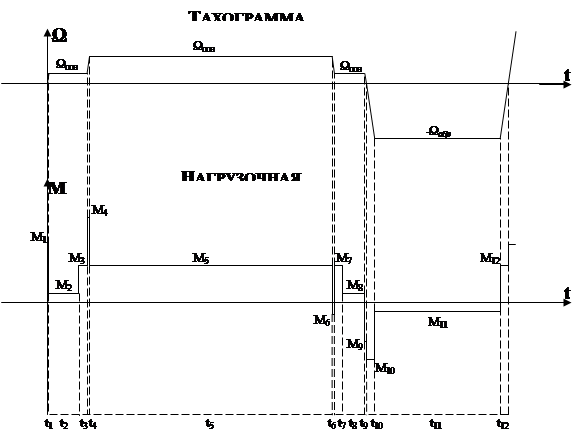
... числа редуктора Расчет передаточного числа редуктора выполняется так, чтобы максимальной скорости рабочего органа механизма соответствовала номинальная скорость двигателя. Для привода грузового лифта: Расчет и построение нагрузочной диаграммы двигателя Для проверки предварительно выбранного двигателя по нагреву выполним построение упрощенной нагрузочной диаграммы двигателя (т.е. ...
... требованиям по перегрузке. 2. Выбор системы управления 2.1 Технико-экономическое обоснование По кривым на рис. 1.3 [2] (с. 12) определяем, что для скорости передвижения тележки V=0.68 м/с и точности остановки v=20 мм требуется обеспечить диапазон регулирования D=1:10. Данному диапазону и установленной мощности электродвигателя удовлетворяют следующие системы управления [2] (табл. ...
0 комментариев