Навигация
Проверка на устойчивость исходной САУ по критерию Гурвица
9737
знаков
3
таблицы
16
изображений
6. Проверка на устойчивость исходной САУ по критерию Гурвица
Передаточная функция исходной САУ имеет вид:
![]()
Характеристический полином (знаменатель ![]() ) имеет вид:
) имеет вид:
![]() ,где
,где
![]()
![]()
![]()
![]()
Составим по нему характеристическое уравнение:
![]()
Составим и подсчитаем определитель Гурвица:
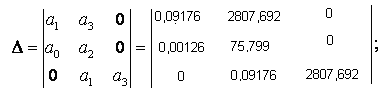
Найдем значение определителя:
Δ=2807.692*(0.09176*75.799-0.00126*2807.692)=9595.64
Определитель больше нуля, что согласно критерию Гурвица свидетельствует об устойчивости системы.
7. Синтез корректирующего устройства
Синтез корректирующего устройства проводится для обеспечения оптимальных показателей качества регулирования САУ путем настройки ее на симметричный оптимум.
Желаемая передаточная функция разомкнутой системы, настроенной на симметричный оптимум, имеет вид:
![]()
Обозначив передаточную функцию корректирующего устройства (регулятора) ![]() и определив передаточную функцию разомкнутой системы
и определив передаточную функцию разомкнутой системы![]() ,
, ![]() можно записать следующим образом:
можно записать следующим образом:
![]()
![]()
Находим значение коэффициента демпфирования:
![]()
Т.к. коэффициент демпфирования ![]() =3,089 >0,7, то полином второго порядка можно разложить на множители:
=3,089 >0,7, то полином второго порядка можно разложить на множители:
![]()
Преобразованная передаточная функция имеет вид:
![]()
Получаем:
![]() выбираем как наименьшую постоянная времени нескорректированной системы.
выбираем как наименьшую постоянная времени нескорректированной системы. ![]() =0.02с
=0.02с
Находим ![]() :
:
![]()


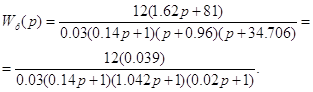
Представим передаточную функцию регулятора в виде типовых звеньевТАУ:
![]()
Модель скорректированной САУ в MATLAB:
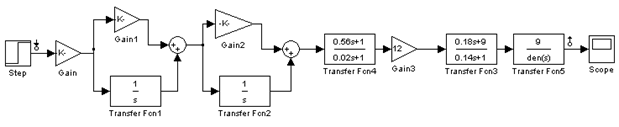
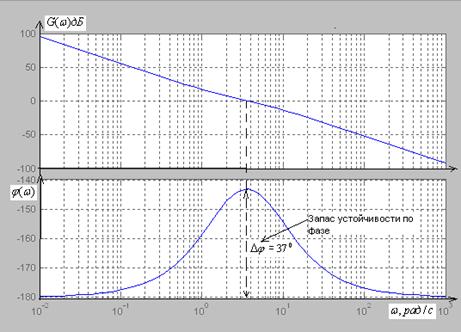
Рис.7 ЛАЧХ и ЛФЧХ скорректированной САУ
Из графиков видно, что запас устойчивости по амплитуде бесконечен, т.к. ЛФЧХ не пересекает угол -180:
![]()
Запас устойчивости по фазе имеет конечное значение![]() ;
;
8. Моделирование переходных процессов в скорректированной САУ.Определение типовых показателей качества в динамике
а) Моделирование переходных процессов скорректированной САУ при ступенчатом изменении задающего и минимального возмущающего воздействия. Определение типовых показателей качества в динамике.
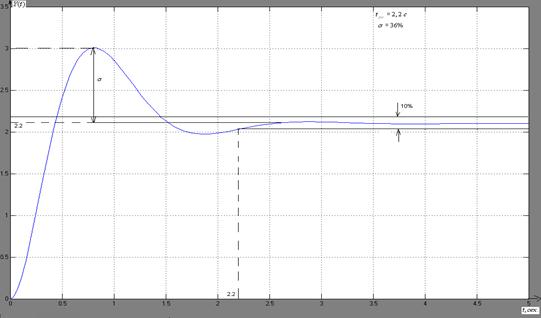
Рис.8 Переходный процесс скорректированной САУ для ![]()
Перерегулирование составляет ![]() .Время регулирования tр=2,2с.
.Время регулирования tр=2,2с.
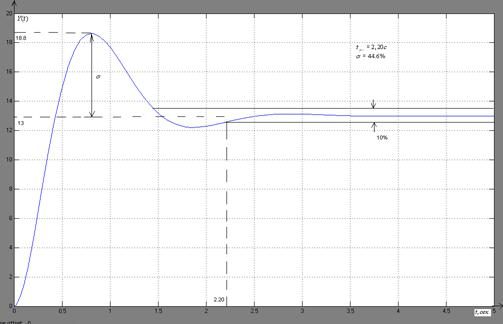
Рис.9 Переходный процесс скорректированной САУ для ![]()
Перерегулирование составляет ![]() .Время регулирования tр=2,20с.
.Время регулирования tр=2,20с.
б) Моделирование переходных процессов скорректированной САУ при ступенчатом изменении задающего и максимального возмущающего воздействия. Определение типовых показателей качества в динамике.
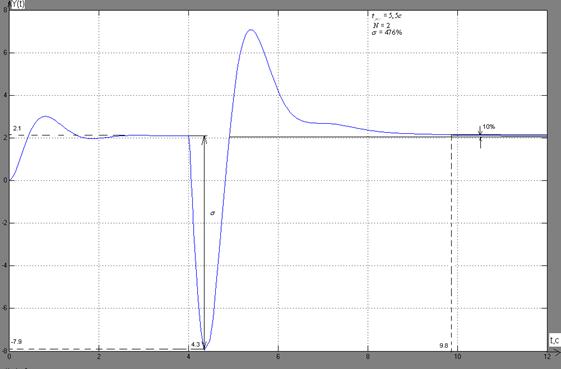
Рис.10 Переходный процесс скорректированной САУ для ![]()
Перерегулирование составляет ![]() .Время регулирования tр=9,8-4,3=5,5с.
.Время регулирования tр=9,8-4,3=5,5с.
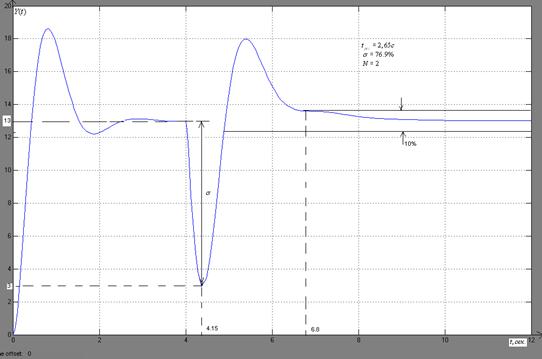
Рис.11 Переходный процесс скорректированной САУ для ![]()
Перерегулирование составляет ![]() .Время регулирования tр=6,8-4,15=2,65с
.Время регулирования tр=6,8-4,15=2,65с
Заключение
В ходе курсовой работы была исследована линейная система автоматического управления (САУ).Был выполнен анализ данной САУ, а в частности, построены её временные и частотные характеристики, произведена проверка на устойчивость, также была обеспечена настройка исходной САУ на симметричный оптимум по средствам введения корректирующего устройства, рассчитаны параметры качества регулирования скорректированной САУ.
По результатам выполненной работы можно сделать следующие выводы:
- Параметры статического режима определяются по построенным внешним статическим характеристикам. Видно, что исходная система обладает статической ошибкой, которая характеризуется наклоном графиков. Наибольший наклон соответствует максимальной статической ошибке (статизму).
- Параметры динамического режима определяются по построенным временным (переходным) и частотным характеристикам исходной САУ. По полученным характеристикам и проведённым аналитическим расчётам был выполнен анализ исходной САУ на устойчивость и сделан вывод о её неустойчивости (по корням характеристического полинома, критерию Найквиста и Гурвица, по ЛАЧХ и ЛФЧХ).
- Для придания исходной САУ устойчивости, а также оптимальных параметров качества регулирования (по задающему воздействию), был выполнен её синтез и настройка на симметричный оптимум.
Данная работа позволила закрепить теоретический курс по данной дисциплине и получить навыки расчёта и анализа систем автоматического управления.
Литература
1. Теория автоматического управления: учебник для вузов. Ч.1. Теория линейных систем автоматического управления / Под редакцией А. А. Воронова.- 2-е издание, перераб. И доп. – М.: Высш. Шк., 1986.
2. Теория автоматического управления: учебник для вузов. – Под редакцией А. В. Нетушила. – 2-е изд., перераб. И доп.- М.: Высш. Шк.,1976.
3. Теория автоматического управления. /Под ред. Воронова А.А.-М.; Высш.шк., 1986г.
4. Макаров И.М., Менский Б.М. Линейные автоматические системы. М.: Машиностроение, 1982г.
5. Ящугин В.А. Теория линейных непрерывных систем автоматического управления в вопросах и ответах.-М.: Высш. шк., 1986г.
6. Певзнер Л.Д. Теория систем управления.- М.: Издательство Московского государственного горного университета, 2002г.
Похожие работы
... lдв - перегрузочная способность выбранного двигателя. 2. СИЛОВЫЕ ЭЛЕМЕНТЫ ЭЛЕКТРОПРИВОДА Основная задача второго этапа проектирования - выбор комплектного тиристорного электропривода из серии КТЭУ для подъемной установки, принятой на первом этапе проектирования. 2.1. Исходные данные для расчета динамики электропривода Двигатель Тип П2-800-255-8КУ4 Номинальная ...
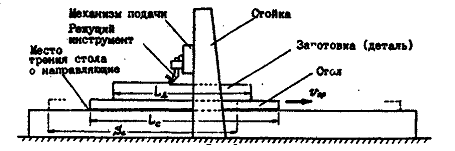
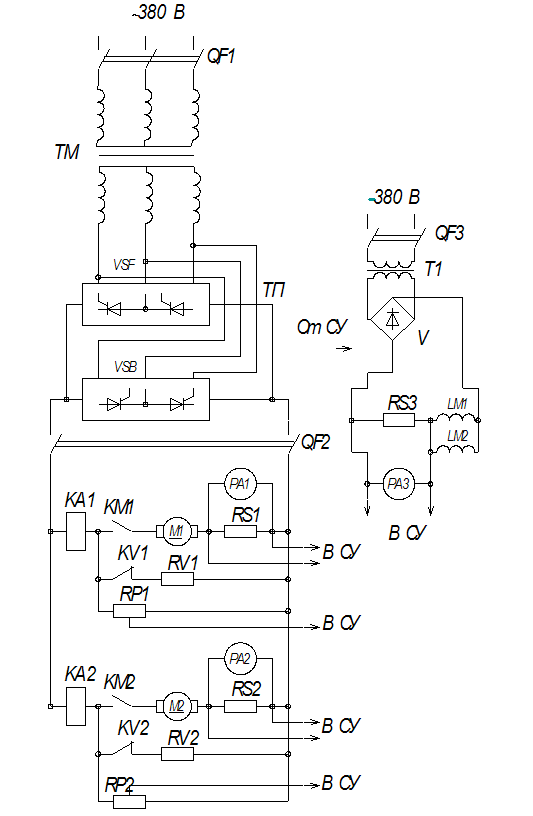
... силовой преобразовательный агрегат, силовой трансформатор и реакторы, выполнить расчет элементов системы автоматического управления электроприводом, выполнить компьютерное моделирование системы автоматизированного электропривода в типовых режимах. Требования к электроприводу: 1. Обеспечение работы механизма по следующему циклу: • подход детали к резцу с пониженной скоростью; • ...
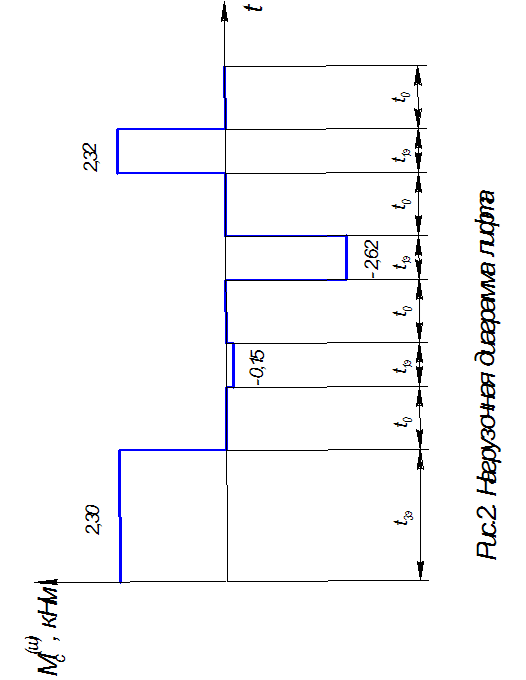
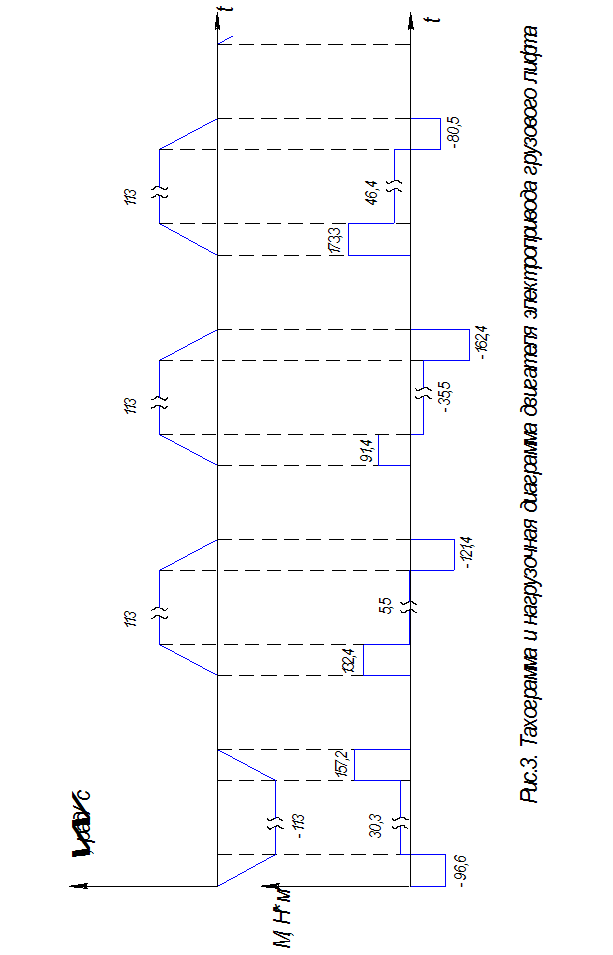
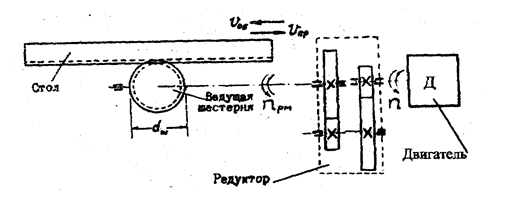
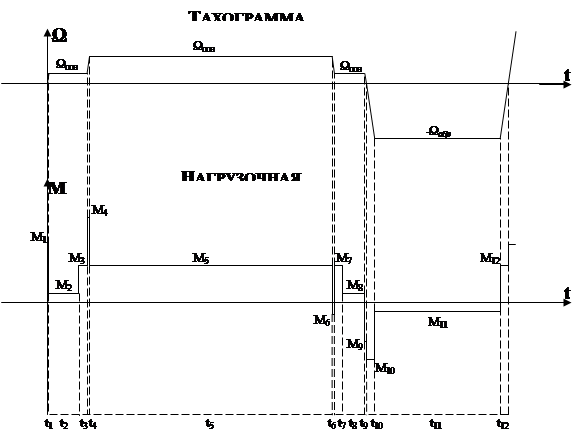
... числа редуктора Расчет передаточного числа редуктора выполняется так, чтобы максимальной скорости рабочего органа механизма соответствовала номинальная скорость двигателя. Для привода грузового лифта: Расчет и построение нагрузочной диаграммы двигателя Для проверки предварительно выбранного двигателя по нагреву выполним построение упрощенной нагрузочной диаграммы двигателя (т.е. ...
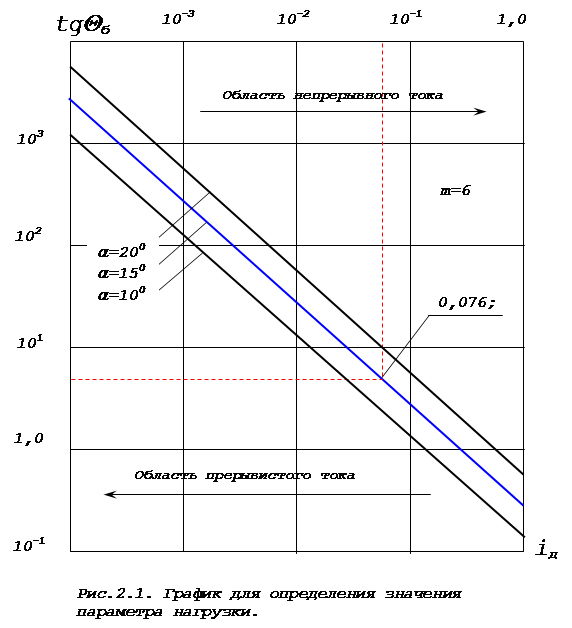
... требованиям по перегрузке. 2. Выбор системы управления 2.1 Технико-экономическое обоснование По кривым на рис. 1.3 [2] (с. 12) определяем, что для скорости передвижения тележки V=0.68 м/с и точности остановки v=20 мм требуется обеспечить диапазон регулирования D=1:10. Данному диапазону и установленной мощности электродвигателя удовлетворяют следующие системы управления [2] (табл. ...
0 комментариев