Навигация
Принцип оптимального управления
49761
знак
0
таблиц
0
изображений
3.2 Принцип оптимального управления.
Ещё один фундаментальный принцип - оптимального управления - в последние годы начал применяться как в технических системах для повышения эффективности производственных процессов, так и в системах организованного управления для совершенствования деятельности предприятий, учреждений, отраслей народного хозяйства.
Принцип оптимального управления можно применить в процессах, показатель эффективности которых зависит не только от текущих значений координат, но и от характера их изменения в прошлом, настоящем и будущем; показатель эффективности выражается некоторым функционалом от координат или от времени. В качестве примера можно привести процесс управления бегом спортсмена на дистанции. Запас энергии спортсмена ограничен, а её расходование зависит от характера бега. Спортсмен не может в каждый момент времени отдавать максимум возможной мощности, так как при этом быстро выдохнется на дистанции.
Нахождение оптимального управления в подобных задачах требует решения в процессе управления достаточно сложной математической задачи методами вариационного исчисления или математического программирования. Таким образом, органической частью систем оптимального управления становится вычислительная машина.
3.3 Принцип адаптации.
В управлении начинает использоваться принцип адаптации. он применяется тогда, когда параметры системы под влиянием внешних факторов изменяются непредвиденным заранее образом настолько сильно, что движение системы претерпевает существенные качественные изменения. При этом рассмотренные выше принципы управления уже не дают возможности обеспечить нормальное функционирование системы и необходимо в процессе управления изменять параметры и даже структуру системы.
4. Классификация систем автоматического управления.
Системы автоматического управления классифицируются по различным признакам.
По характеру изменения управляющего воздействия различают системы автоматической стабилизации, программного регулирования и следящие системы.
По виду передаваемых сигналов выделяют системы непрерывные, с гармонической модуляцией, импульсные, релейные и цифровые.
По способу математического описания, принятого при исследовании, выделяют линейные и нелинейные системы. Обе группы могут быть представлены непрерывными, дискретными и дискретно-непрерывными системами.
По виду контролируемых изменений своих свойств различают неприспосабливающиеся и приспосабливающиеся (адаптивные) системы. В последнем классе можно выделить самонастраивающиеся системы с самонастройкой параметров или воздействий и самоорганизующиеся системы с контролируемыми изменениями структуры.
В зависимости от принадлежности источника энергии, при помощи которого создаётся управляющее воздействие, системы могут быть прямого и непрямого действия. В системах прямого действия используется энергия управляемого объекта. К ним относятся простейшие системы стабилизации (уровня, расхода, давления и т.п.), в которых воспринимающий элемент через рычажную систему непосредственно действует на исполнительный орган (заслонку, клапан и т.д.). В системах непрямого действия управляющее воздействие создаётся за счёт энергии дополнительного источника.
4.1 Системы автоматической стабилизации,
программного регулирования и
следящие системы.
Системы автоматического регулирования в зависимости от характера изменения управляющего воздействия делятся на три касса. Различают системы автоматической стабилизации, системы программного регулирования и следящие системы.
Системы автоматической стабилизации характеризуются тем, что в процессе работы системы управляющее воздействие остаётся величиной постоянной.
Основной задачей системы автоматической стабилизации является поддержание на постоянном уровне с допустимой ошибкой регулируемой величины независимо от действующих возмущений. Действующие возмущения
вызывают отклонение регулируемой величины от предписанного ей значения. Отклонением регулируемой величины называется разность между значением регулируемой величины в данный момент времени и её значением, принятым за начало отсчёта.
Понятие отклонения регулируемой величины является характерным для систем автоматической стабилизации и позволяет дать качественную оценку динамическим свойствам систем этого класса
Системами автоматической стабилизации являются различного рода САР, предназначенные для регулирования скорости, напряжения, температуры, давления; например, стабилизатор курса самолёта и т.д.
Системы программного регулирования отличаются тем, что управляющее воздействие изменяется по заранее установленному закону в функции времени или координат системы.
О точности воспроизведения управляющего воздействия на выходе системы воспроизведения судят по величине ошибки, которая определяется разность между управляющим воздействием и регулируемой величиной в данный момент времени.
Примером систем программного регулирования могут служить системы управления копировально-фрезерным станком.
В следящих системах управляющее воздействие также является величиной переменной, но математическое описание его во времени не может быть установлено, так как источником сигнала служит внешнее явление, закон изменения которого заранее неизвестен. В качестве примера следящей системы можно указать на радиолокационную станцию автоматического сопровождения самолёта.
Так как следящие системы предназначены для воспроизведения на выходе управляющего воздействия с возможно большей точностью, то ошибка, так же как и в случае систем программного регулирования, является той характеристикой, по которой можно судить о динамических свойствах следящей системы. Ошибка в следящих системах, как и в системах программного регулирования, является сигналом, в зависимости от величины которого осуществляется управление исполнительным двигателем.
Похожие работы
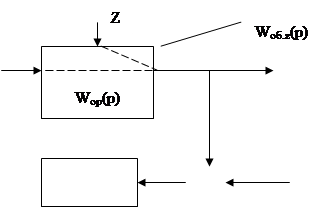
... АСР. Данная схема детализируется для расчета замкнутой АСР и приводится к виду X0 Wp(p) Рис. 7. Структурная схема замкнутой автоматической системы управления, состоящей из объекта и регулятора В качестве выходной величины системы ...
... . Это позволяет: -снизить трудоемкость обработки -снизить себестоимость обработки -сократить время обработки и обслуживания. Ожидаемый частный годовой экономический эффект от автоматизации шлифовального процесса путем разработки автоматической системы управления параметров станка является снижение затрат на обработку детали типа кольцо ступенчатое при годовой программе выпуска 1000 ед. ...
... [3 (п.9.13в)]; - обеспечения минимального расхода наружного воздуха в системах с переменным расходом [3 (п.9.15)] и др. 3.4 Регулирующие функции Регулирующие функции – автоматическое поддержание заданных параметров являются основными по определению [3 (п.9.11)] для систем воздушного отопления, приточной и вытяжной вентиляции, работающей с переменным расходом, рециркуляцией воздуха, систем ...
... элементов АСУ ТП 2.1 Разработка общих алгоритмов функционирования АСУ ТП. Блок – схемы алгоритма и их описание Система управления процессом испытания электропривода лифтов предназначена для управления нагрузочным электроприводом испытательного стенда в ручном или автоматическом режиме, разработана на базе микропроцессорного программируемого контроллера и выполняет следующие функции: ввод, ...
0 комментариев