Навигация
Системы автоматического регулирования непрерывного, импульсного и релейного действия
49761
знак
0
таблиц
0
изображений
4.4 Системы автоматического регулирования непрерывного, импульсного и релейного действия.
В зависимости от вида сигналов различают системы автоматического регулирования непрерывные, релейные и импульсные.
Особенностью непрерывных систем является то, что во всех элементах, составляющих систему, входные и выходные сигналы являются непрерывными функциями времени. К числу непрерывных систем относятся также системы с |гармонической модуляцией. При этом для передачи сигнала могут быть использованные амплитудно-модулированные, частотно-модулированные колебания и колебания с модулированной фазой.
4.5 Регулирование по возмущению и
комбинирование регулирование.
Процесс реализации компенсации возмущающего воздействия называется регулированием по возмущению. Регулирование по возмущению обладает достоинствами и недостатками. В числе достоинств следует отметить высокое быстродействие. К недостаткам нужно отнести то, что цепь компенсации обеспечивает необходимое качество регулирования только при действии того возмущения, на которое она рассчитана. При действии другого возмущения и необходимости компенсировать его действие нужно вводить новую цепь компенсации, что, конечно, усложняет систему. Цепь компенсации не является обратной связью, потому что по этой цепи передаётся входной сигнал, а не регулируемая (выходная) величина объекта .
В системах, использующих принцип обратной связи или принцип регулирования по отклонению, решающее значение имеет сам факт отклонения регулируемой величины от установленной программы независимо от характера величины, вызвавшей это отклонение. Поэтому в системах автоматического регулирования по отклонению нет недостатка, имеющего место в системах регулирования по возмущению.
В технике автоматического регулирования имеются системы, в которых совмещаются достоинства регулирования по отклонению и возмущению. Система, в которых одновременно используются оба принципа регулирования, называются комбинированными, а принципы в этих системах - комбинированным регулированием.
Заключение
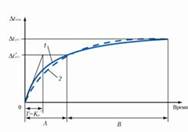
Воздействие, приложенное к системе автоматического регулирования, вызывает изменение регулируемой величины. Изменение регулируемой величины во времени определяет переходный процесс, характер которого зависит от воздействия и от свойств системы.
Является ли система следящей системой, на выходе которой нужно воспроизвести как можно более точно закон изменения управляющего сигнала, или системой автоматической стабилизации, где независимо от возмущения регулируемая величина должна поддерживаться на заданном уровне, переходный процесс представляется динамической характеристикой, по которой можно судить о качестве работы системы.
Любое воздействие, приложенное к системе, вызывает переходный процесс. Однако в рассмотрение обычно входят те переходные процессы, которые вызваны типовыми воздействиями, создающими условия более полного выявления динамических свойств системы. К числу типовых воздействий относятся сигналы скачкообразного и ступенчатого вида, возникающие, например, при включении системы или при скачкообразном изменении нагрузки; сигналы ударного действия, представляющие собой импульсы малой длительности по сравнению с временем переходного процесса.
Чтобы качественно выполнить задачу регулирования в различных изменяющихся условиях работы система должна обладать определённым (заданным) запасом устойчивости .
В устойчивых системах автоматического регулирования переходный процесс с течением времени затухает и наступает установившееся состояние. Как в переходном режиме, так и в установившемся состоянии выходная регулируемая величина отличается от желаемого закона изменения на некоторую величину, которая является ошибкой и характеризует точность выполнения поставленных задач. Ошибки в установившемся состоянии определяют статическую точность системы и имеют большое практическое значение. Поэтому при составлении технического задания на проектирование системы автоматического регулирования отдельно выделяются требования, предъявляемые к статической точности .
Большой практический интерес представляет поведение системы в переходном процессе. Показателями переходного процесса являются время переходного процесса, перерегулирование и число колебаний регулируемой величины около линии установившегося значения за время переходного процесса.
Показатели переходного процесса характеризуют качество системы автоматического регулирования и являются одним из важнейших требований, предъявляемых к динамическим свойствам системы.
Таким образом, для обеспечения необходимых динамических свойств к системам автоматического регулирования должны быть предъявлены требования по запасу устойчивости, статической точности и качеству переходного процесса.
В тех случаях когда воздействие (управляющее или возмущающее) не является типовым сигналом и не может быть сведено к типовому, то есть когда оно не может рассматриваться как сигнал с заданной функцией времени и является случайным процессом, в рассмотрение вводят вероятностные характеристики. Обычно при этом оценивается динамическая прочность системы с помощью понятия среднеквадратичной ошибки. Следовательно, в случае систем автоматического регулирования, находящихся под воздействием случайных стационарных процессов, для получения желаемых динамических свойств системы нужно предъявить определённые требования к величине среднеквадратичной ошибки.
Список литературы
1. Н.И.Подлесный, В.Г.Рубанов. Элементы систем автоматического управления
и контроля. - Киев.: «Вища школа»,1982.-477 с.
2. В.А.Лукас. Теория автоматического управления. - М.: «Недра», 1990.-416 с.
3. А.А.Первозванский. Курс автоматического управления. - М.: «Наука»,
1986.-367 с.
4. Я.З.Ципкин. Основы теории автоматических систем. - М.: «Наука»,
1977.-436с.
5. А.А.Воронов, В.К.Титов, Б.Н.Новоградов. Основы теории автоматического
регулирования и управления. - М.: «Высшая школа», 1977.-519с.
6. Учебник; под.ред. В.П.Косарева, А.Ю.Королёва. Экономическая информатика и вычислительная техника. - М.: «Финансы и статистика», 1996.- 336с.
Похожие работы
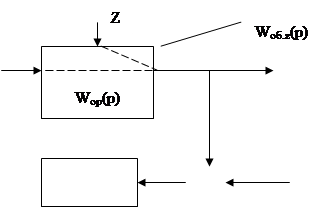
... АСР. Данная схема детализируется для расчета замкнутой АСР и приводится к виду X0 Wp(p) Рис. 7. Структурная схема замкнутой автоматической системы управления, состоящей из объекта и регулятора В качестве выходной величины системы ...
... . Это позволяет: -снизить трудоемкость обработки -снизить себестоимость обработки -сократить время обработки и обслуживания. Ожидаемый частный годовой экономический эффект от автоматизации шлифовального процесса путем разработки автоматической системы управления параметров станка является снижение затрат на обработку детали типа кольцо ступенчатое при годовой программе выпуска 1000 ед. ...
... [3 (п.9.13в)]; - обеспечения минимального расхода наружного воздуха в системах с переменным расходом [3 (п.9.15)] и др. 3.4 Регулирующие функции Регулирующие функции – автоматическое поддержание заданных параметров являются основными по определению [3 (п.9.11)] для систем воздушного отопления, приточной и вытяжной вентиляции, работающей с переменным расходом, рециркуляцией воздуха, систем ...
... элементов АСУ ТП 2.1 Разработка общих алгоритмов функционирования АСУ ТП. Блок – схемы алгоритма и их описание Система управления процессом испытания электропривода лифтов предназначена для управления нагрузочным электроприводом испытательного стенда в ручном или автоматическом режиме, разработана на базе микропроцессорного программируемого контроллера и выполняет следующие функции: ввод, ...
0 комментариев