Навигация
Динамический расчет следящих систем
19635
знаков
1
таблица
19
изображений
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОСCИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ
ЮЖНЫЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ
ЮЖНОГО ФЕДЕРАЛЬНОГО УНИВЕРСИТЕТА В Г. ТАГАНРОГЕ
Факультет автоматики и вычислительной техники
Кафедра систем автоматического управления
ПОЯСНИТЕЛЬНАЯ ЗАПИСКАк курсовой работе
по дисциплине «Теория автоматического управления»на тему «Динамический расчет следящих систем»
Вариант 5, колонка 1.
Выполнил:
студент гр. А-144
18.12.07 г
Безродный С.В.
Проверил:
преподаватель кафедры САУ
18.12.07 г
Гайдук А.Р.
Таганрог 2007 г.
СОДЕРЖАНИЕ.
1.ВВЕДЕНИЕ. 3
2.ТЕХНИЧЕСКОЕ ЗАДАНИЕ. 5
3.ОПИСАНИЕ СЛЕДЯЩЕЙ СИСТЕМЫ. 7
4. УРАВНЕНИЯ ЭЛЕМЕНТОВ. 8
4.1 Измеритель рассогласования. 8
4.2 Датчик выхода. 9
4.3 Усилитель мощности. 10
4.4 Редуктор. 10
4.5 Двигатель постоянного тока. 11
5.ВЫВОД УРАВНЕНИЙ СИСТЕМЫ. 15
5.1 Уравнения в переменных состояния. 15
5.2 Матричная форма уравнений в переменных состояния. 15
5.3 Уравнения вход-выход заданной части системы. 16
6.АНАЛИЗ СВОЙСТВ ЗАДАННОЙ ЧАСТИ СЛЕДЯЩЕЙ СИСТЕМЫ. 18
6.1 Проверка управляемости. 18
6.2 Проверка наблюдаемости заданной части системы. 19
6.3 Проверка устойчивости нескорректированной системы. 20
7. СИНТЕЗ УСТРОЙСТВА УПРАВЛЕНИЯ. 22
8. СИНТЕЗ НАБЛЮДАТЕЛЯ ПЕРЕМЕННЫХ СОСТОЯНИЯ. 25
9. ПОСТРОЕНИЕ И АНАЛИЗ МОДЕЛИ СИСТЕМЫ. 27
10.ЗАКЛЮЧЕНИЕ. 35
11.СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ. 36
ПРИЛОЖЕНИЕ. Схема электрическая принципиальная.
1.ВВЕДЕНИЕ.
В зависимости от характера информации, получаемой об объекте в процессе его работы, наличия его математического описания, статических характеристик объекта и главное – задачи, поставленной перед системой автоматического управления, принципы автоматического управления существенно различаются.
Основной задачей курсовой работы является синтез и последующее исследование следящей системы с использованием современных методов и инструментов теории управления. Основным требованием, предъявляемым к следящим системам, является минимум погрешности ![]() , определяемой как разность между заранее неизвестным законом
, определяемой как разность между заранее неизвестным законом ![]() и управляемой величиной
и управляемой величиной ![]() . Следящая система представляет собой замкнутую систему регулирования угла поворота вала, управляемого двигателем; задающее воздействие устанавливается путем поворота некоторого задающего вала.
. Следящая система представляет собой замкнутую систему регулирования угла поворота вала, управляемого двигателем; задающее воздействие устанавливается путем поворота некоторого задающего вала.
Выполнение данной курсовой работы охватывает следующие разделы курса «Теория управления»: «Составление математических моделей элементов систем и регулярных воздействий»; «Преобразование моделей»; «Аналитический синтез уравнений управляющего устройства по требованиям к качеству системы»; реализация этих уравнений, т.е. разработка схемы устройства управления или алгоритма работы цифрового варианта устройства управления.
Следящие системы применяются для управления радиолокационными антеннами, радиотелескопами, артиллерийскими установками на подвижных платформах, а также для регулирования синхронности и синфазности вращения валов ведущего и ведомого двигателей в том случае, когда они расположены на достаточно большом расстоянии друг от друга.
Нетрудно заметить, что качественные следящие системы, отрабатывающие с заданной точностью поступающие на их вход задающие воздействия, применяются во многих сферах жизнедеятельности людей: в промышленности, в области военной техники, в гражданской авиации и т.д. Однако создание следящих систем, которые затем найдут свое применение в определенных областях человеческой деятельности, включает в себя несколько этапов: постановку задачи, разработку математической модели синтезируемой системы, непосредственно синтез самой системы и переход от математической модели проектируемой системы к реальным устройствам, которые бы описывались синтезированной моделью, т.е. этап реализации. В данной курсовой работе как раз и рассматриваются все перечисленные этапы создания следящих систем.
2.ТЕХНИЧЕСКОЕ ЗАДАНИЕ.
1) Начертить функциональную схему заданной части системы, вывести дифференциальные уравнения в переменных состояния всех элементов, а также заданной части системы. Численные значения параметров элементов системы:
| Параметр | Величина |
|
| 77 |
|
| 1,2 |
|
| 110 |
|
| 3000 |
|
| 5,1 |
|
| 25·10-4 |
|
| 0,28 |
|
| 75 |
|
| 0,035 |
|
| 1 |
Тип усилителя – транзисторный.
Тип измерителя рассогласования – сельсины.
2) Проверить наблюдаемость, управляемость и устойчивость заданной части при коэффициенте усиления усилителя ![]() .
.
3) Начертить структурную расчетную схему заданной части, вывести уравнения вход-выход заданной части системы.
4) Построить модальное управление по заданному времени регулирования ![]() и условию астатизма первого порядка.
и условию астатизма первого порядка.
5) Построить наблюдатель Калмана для заданной части системы, перейти к управлению по оценкам переменных состояния, время переходного процесса в наблюдателе положить равным ![]() .
.
6) Проверить устойчивость замкнутой системы, построить переходные характеристики ![]() , воспользовавшись для моделирования пакетом SIMULINK for Windows в системе MatLAB.
, воспользовавшись для моделирования пакетом SIMULINK for Windows в системе MatLAB.
7) Осуществить выбор электрической схемы усилителя мощности (по литературным источникам), построить схему управляющего устройства вместе с наблюдателем на операционных усилителях и схему всей системы.
3.ОПИСАНИЕ СЛЕДЯЩЕЙ СИСТЕМЫ.
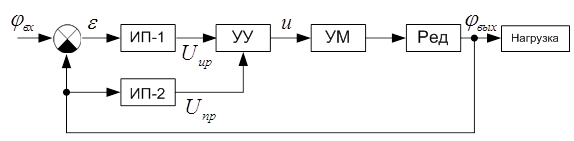
Рис.1. Функциональная схема проектируемой системы.
ИП-1 – измерительный преобразователь (сельсины)
ИП-2 – потенциометрический преобразователь угла поворота выходного вала
УУ – управляющее устройство
УМ – усилитель мощности
ИД – исполнительный двигатель
Ред – редуктор
Нагрузка – приводимый в движение рассматриваемой системой агрегат
В качестве измерительных преобразователей (чувствительных элементов) используются сельсины. Преобразователь угла поворота выходного вала ИП-2 берется потенциометрическим. Потенциометрические датчики обычно питаются от источника постоянного напряжения. Если измерительные преобразователи работают на переменном токе, то на их выходе включается фазочувствительный усилитель-выпрямитель, являющийся составной частью соответствующего ИП, т.е. его коэффициент передачи учтен в заданном коэффициенте передачи чувствительного элемента.
Управляющее устройство (УУ), принимает сигналы, поступающие с обоих ИП. В нем формируется напряжение, пропорциональное управляющему воздействию, которое затем подается на усилитель мощности (УМ). В курсовой работе синтезируется уравнение УУ и разрабатывается его схема на операционных усилителях.
4.УРАВНЕНИЯ ЭЛЕМЕНТОВ
Похожие работы
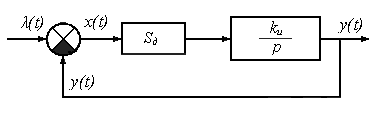
... в точке подачи обратной связи и определяется как передаточная функция от ошибки x(t) к управляемой величине y(t) . Передаточные функции в обобщенной структурной схеме радиотехнической следящей системы Основная передаточная функция – передаточная функция замкнутой системы. Определяется отношением изображений по Лапласу управляемой величины и задающего воздействия: где Передаточная ...
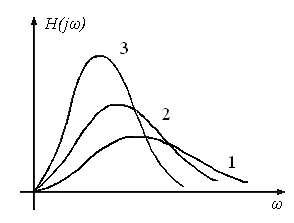
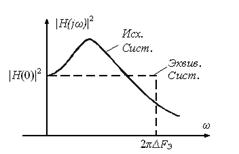
... где - частотная передаточная функция системы; - спектральная плотность процесса на входе. Преобразовав по Фурье правую и левую часть можно определить корреляционную функцию: . Дисперсия случайного процесса на выходе линейной системы: (1) или: , (2) где Sv(w) –двусторонняя спектральная плотность процесса на выходе системы. При использовании односторонней спектральной плотности ...
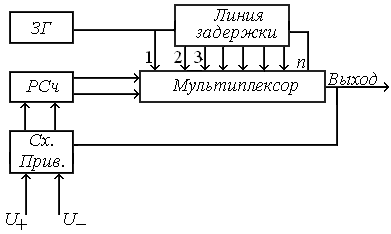
... значений относительной нестабильности синхронизируемых генераторов от величины дискрета подстройки по фазе. № п/п 1 3*10-5 2 2*10-4 3 4,8*10-4 4 1,9*10-3 Примеры реализации цифровых следящих систем В качестве примеров рассмотрим схемы цифровых систем ФАПЧ с астатизмом второго порядка, реализующие методы дискретного управления фазой и ...
... переходного процесса для системы с дискретным корректирующим звеном. 2.6.8. Определение рекуррентного уравнения дискретного корректирующего звена. 2.6.9. Разработка принципиальной схемы цифровой следящей системы. 2.7. Расчетно-пояснительная записка должна содержать следующие разделы. 2.7.1. Введение (цель выполнения работы, описание следящей системы, принцип ее ...
0 комментариев