Навигация
СИНТЕЗ НАБЛЮДАТЕЛЯ ПЕРЕМЕННЫХ СОСТОЯНИЯ
19635
знаков
1
таблица
19
изображений
8. СИНТЕЗ НАБЛЮДАТЕЛЯ ПЕРЕМЕННЫХ СОСТОЯНИЯ.
Построение модального управления пригодно лишь в том случае, когда переменные состояния могут быть измерены непосредственно. Если же эти переменные не доступны измерению, то для получения их асимптотических оценок необходимо построить наблюдатель.
Наблюдатель переменных состояния заданной части будем строить на основе наблюдателя Калмана.
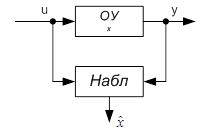
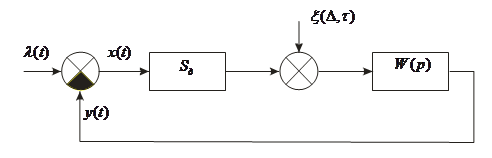
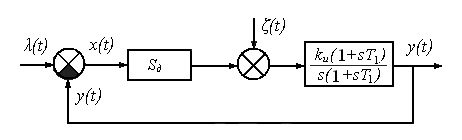
Рис.8. Структурная схема системы с наблюдателем.
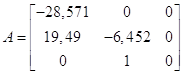
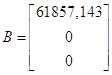
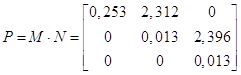
В соответствие с заданием:
![]()
![]()
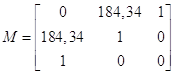
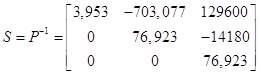
Далее производим расчеты в соответствии со стандартным алгоритмом построения наблюдателя:
 ,
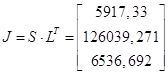
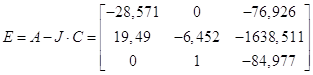
,  ,
,
Корни желаемого характеристического полинома выберем следующие:
![]()
![]() ,
, ![]() ,
, ![]() ,
,
![]()
![]()
![]()
![]()
Характеристический полином наблюдателя:
![]()
Уравнение наблюдателя имеет вид:
![]()

9. ПОСТРОЕНИЕ И АНАЛИЗ МОДЕЛИ СИСТЕМЫ.
Моделирование как исходной, так и синтезированной систем выполним в среде “SIMULINK” программного пакета “MATLAB”.
Убедимся в том, что оценки переменных состояния «догоняют» переменные состояния объекта на заданном интервале tнаб. Для этого составим структурную схему модели (объект + наблюдатель с управлением по переменным состояния).
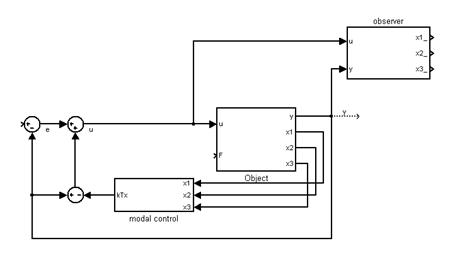
Рис.9. Структурная схема системы с управлением по переменным состояния.
При ненулевых начальных условиях на одном из интеграторов объекта:
Реализуем структурную схему системы с управлением по оценкам переменных состояния.
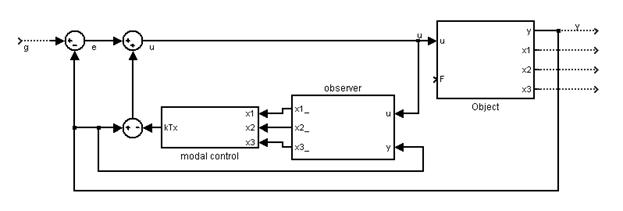
Рис. 13. Структурная схема системы с управлением по оценкам переменных состояния.
Подсистемы (subsystem) объекта управления, наблюдателя и модального управления набраны по соответствующим уравнениям и имеют следующий вид.
Объект управления:
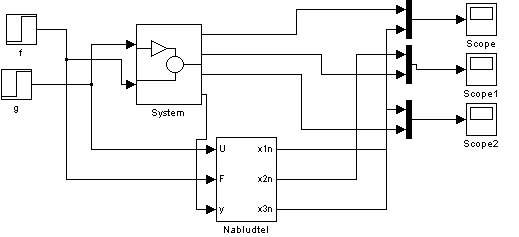
Рис. 14. Модель объекта с наблюдателем переменных состояния.
Наблюдатель:
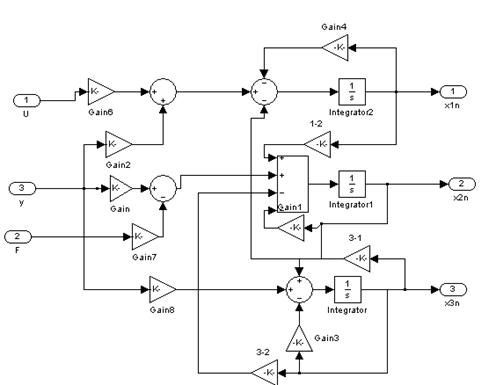
Рис. 15. Структурная схема наблюдателя переменных состояния
Модальное управление:
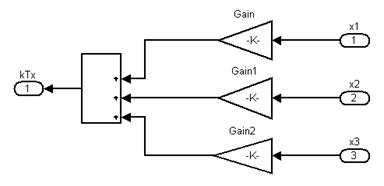
Рис.16. Модель управляющего устройства.
Смоделируем переходной процесс системы при ненулевом начальном условии на одном из интеграторов объекта.
Построим переходные процессы при ступенчатом и линейном изменении задающего воздействия, т.е. входного угла поворота.
На входе ступенчатое воздействие, возмущающего воздействия нет.
На входе ступенчатое воздействие, возмущающее воздействие есть.
На входе линейно нарастающее воздействие, возмущающего воздействия нет, Начальные условия – нулевые.
На входе линейно нарастающее воздействие, возмущающего воздействия нет. Начальные условия – ненулевые.
На входе линейно нарастающее воздействие, возмущающее воздействие есть. Начальные условия – ненулевые.
Анализ построенного наблюдателя Калмана.
Из приведенных графиков видно, что оценки переменных состояния «догоняют» переменные состояния объекта на заданном интервале ![]() (ошибка оценивания по прошествии этого времени практически равна нулю).
(ошибка оценивания по прошествии этого времени практически равна нулю).
Анализ построенного модального управления.
Из графиков ясно видно, что при отсутствии возмущающего момента ![]() система отрабатывает входное воздействие g(t) практически с нулевой ошибкой, к установившемуся значению приближаясь за время регулирования
система отрабатывает входное воздействие g(t) практически с нулевой ошибкой, к установившемуся значению приближаясь за время регулирования ![]() , т. е. переходная характеристика входит в пятипроцентный коридор точности полностью после времени регулирования. Это свидетельствует о правильности рассчитанного вектора коэффициентов модального управления.
, т. е. переходная характеристика входит в пятипроцентный коридор точности полностью после времени регулирования. Это свидетельствует о правильности рассчитанного вектора коэффициентов модального управления.
10.ЗАКЛЮЧЕНИЕ.
В данной курсовой работе была синтезирована и исследована с использованием современных методов и инструментов теории управления приборная следящая система.
Данная курсовая работа выполнена с помощью программного пакета SIMULINK в системе MATLAB (для проведения численного моделирования) и программы MathCAD (для выполнения расчётов).
В данной курсовой работе было синтезировано устройство управления, для этого выведены дифференциальные уравнения в переменных состояния всех элементов, а также заданной части системы; проверены наблюдаемость, управляемость и устойчивость заданной части; построена структурная расчётная схема, выведены уравнения вход-выход; построено модальное управление и наблюдатель Калмана; проделано моделирование с помощью SIMULINK в системе MATLAB, а также была построена схема управляющего устройства вместе с наблюдателем на операционных усилителях.
11.СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ.
1. Теория автоматического управления. Под ред. А. В. Нетушила. Учебник для вузов. Изд. 2-е. М., "Высшая школа",1976.
2. Гайдук А. Р., Пьявченко Т. А. Учебно-методическое пособие по выполнению курсовой работы «Динамический расчет следящих систем» по дисциплине «Теория управления». Таганрог: Изд-во ТРТУ, 2001. 19с.
3. А. Р. Гайдук. Алгебраические методы анализа и синтеза систем автоматического управления. Ростов-на-Дону: Изд-во РГУ, 1988. 208с.
4. Принципы регулирования. Руководство к лабораторной работе по курсу "Теория автоматического управления"/Таганрог. Радиотехнический институт; Сост. Н. В. Балалаев, Ю. Г. Сотников; Таганрог. 1993. 20 с.
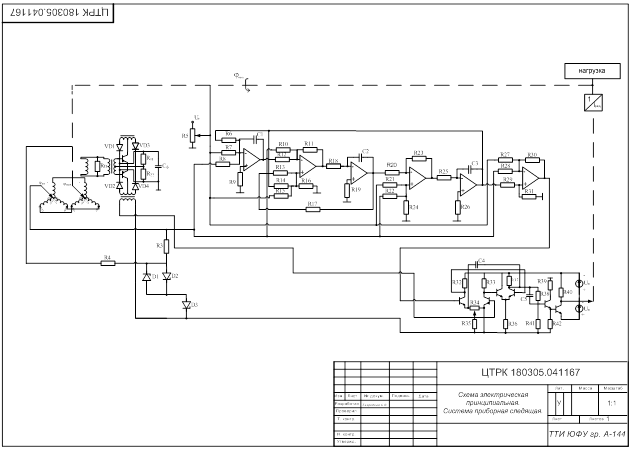
ПРИЛОЖЕНИЕ. Схема электрическая принципиальная.
Похожие работы
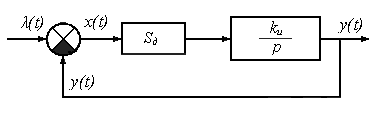
... в точке подачи обратной связи и определяется как передаточная функция от ошибки x(t) к управляемой величине y(t) . Передаточные функции в обобщенной структурной схеме радиотехнической следящей системы Основная передаточная функция – передаточная функция замкнутой системы. Определяется отношением изображений по Лапласу управляемой величины и задающего воздействия: где Передаточная ...
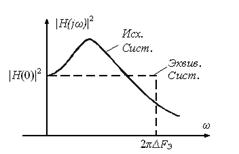
... где - частотная передаточная функция системы; - спектральная плотность процесса на входе. Преобразовав по Фурье правую и левую часть можно определить корреляционную функцию: . Дисперсия случайного процесса на выходе линейной системы: (1) или: , (2) где Sv(w) –двусторонняя спектральная плотность процесса на выходе системы. При использовании односторонней спектральной плотности ...
... значений относительной нестабильности синхронизируемых генераторов от величины дискрета подстройки по фазе. № п/п 1 3*10-5 2 2*10-4 3 4,8*10-4 4 1,9*10-3 Примеры реализации цифровых следящих систем В качестве примеров рассмотрим схемы цифровых систем ФАПЧ с астатизмом второго порядка, реализующие методы дискретного управления фазой и ...
... переходного процесса для системы с дискретным корректирующим звеном. 2.6.8. Определение рекуррентного уравнения дискретного корректирующего звена. 2.6.9. Разработка принципиальной схемы цифровой следящей системы. 2.7. Расчетно-пояснительная записка должна содержать следующие разделы. 2.7.1. Введение (цель выполнения работы, описание следящей системы, принцип ее ...
0 комментариев