Навигация
Уравнения в переменных состояния
19635
знаков
1
таблица
19
изображений
5.1 Уравнения в переменных состояния.
Здесь объединяются уравнения всех элементов:
· Измерителя рассогласования;
· Датчика выхода;
· Усилителя мощности;
· Двигателя;
· Редуктора
в одну систему путем исключения промежуточных переменных так, чтобы остались входные величины (![]() ,
, ![]() ,
, ![]() ), переменные состояния (
), переменные состояния (![]() ,
,![]() ,
,![]() ) и величина
) и величина ![]() .
.
Уравнения в переменных состояния:
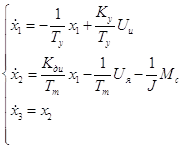 (18)
(18)
Здесь ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
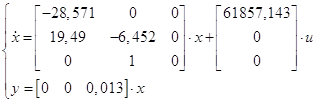
5.2 Матричная форма уравнений в переменных состояния.
Учитывая
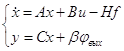
уравнения в переменных состояния в матричной форме будут иметь вид:
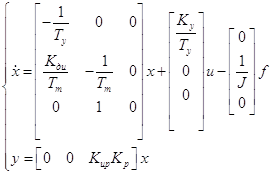 (18)
(18)
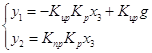
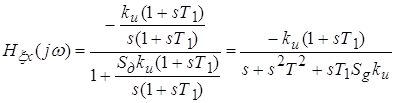
5.3 Уравнения вход-выход заданной части системы.
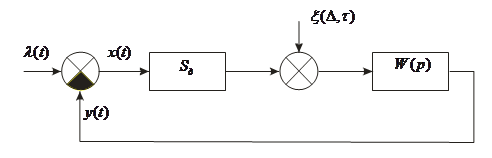
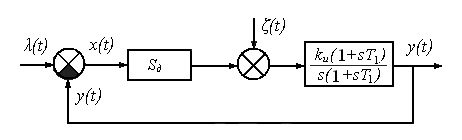
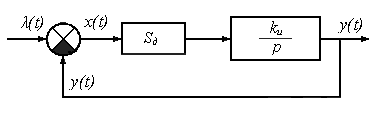
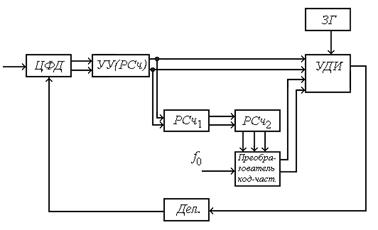
Для вывода уравнений вход-выход целесообразно построить структурную схему заданной части:
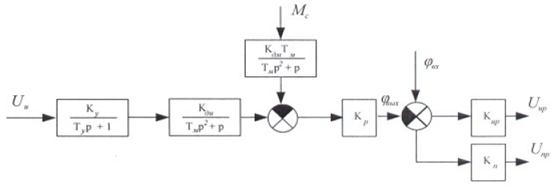
Рис.5. Структурная схема заданной части.
![]()
![]()
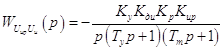
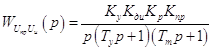
 (19)
(19)
 (20)
(20)
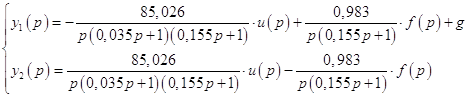
Для вывода уравнений вход-выход оба уравнения (20) умножим на общий знаменатель и перейдем к оригиналам:
 (21)
(21)
6.АНАЛИЗ СВОЙСТВ ЗАДАННОЙ ЧАСТИ СЛЕДЯЩЕЙ СИСТЕМЫ.
6.1 Проверка управляемости.
Проверку проводим по уравнению (18) при ![]() с помощью критерия управляемости.
с помощью критерия управляемости.
Обычно предполагают, что объект управления (система) обеспечивает возможность изменения его переменных состояния и регулируемых величин в соответствие с целью управления с помощью управлений, приложенных к нему. Однако ясно, что в общем случае не всякий объект управления допускает такую возможность, т.е. не каждый объект является управляемым. Следует отметить, что это свойство – управляемости – зависит исключительно от внутренних свойств объекта.
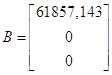
Для оценки управляемости систем используется критерий Калмана, в основе которого лежит матрица управляемости:
![]() ,
,
где ![]() - размерность вектора переменных состояния.
- размерность вектора переменных состояния.
В нашем случае ![]() , значит:
, значит:
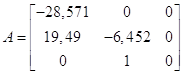 ,
,  ,
,
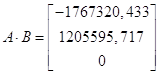 ,
,
Матрица U будет иметь вид:
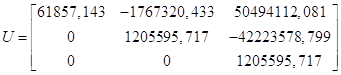
![]()
![]()
Так как ![]() и определитель матрицы U не равен нулю, то объект является полностью управляемым.
и определитель матрицы U не равен нулю, то объект является полностью управляемым.
Похожие работы
... в точке подачи обратной связи и определяется как передаточная функция от ошибки x(t) к управляемой величине y(t) . Передаточные функции в обобщенной структурной схеме радиотехнической следящей системы Основная передаточная функция – передаточная функция замкнутой системы. Определяется отношением изображений по Лапласу управляемой величины и задающего воздействия: где Передаточная ...
... где - частотная передаточная функция системы; - спектральная плотность процесса на входе. Преобразовав по Фурье правую и левую часть можно определить корреляционную функцию: . Дисперсия случайного процесса на выходе линейной системы: (1) или: , (2) где Sv(w) –двусторонняя спектральная плотность процесса на выходе системы. При использовании односторонней спектральной плотности ...
... значений относительной нестабильности синхронизируемых генераторов от величины дискрета подстройки по фазе. № п/п 1 3*10-5 2 2*10-4 3 4,8*10-4 4 1,9*10-3 Примеры реализации цифровых следящих систем В качестве примеров рассмотрим схемы цифровых систем ФАПЧ с астатизмом второго порядка, реализующие методы дискретного управления фазой и ...
... переходного процесса для системы с дискретным корректирующим звеном. 2.6.8. Определение рекуррентного уравнения дискретного корректирующего звена. 2.6.9. Разработка принципиальной схемы цифровой следящей системы. 2.7. Расчетно-пояснительная записка должна содержать следующие разделы. 2.7.1. Введение (цель выполнения работы, описание следящей системы, принцип ее ...
0 комментариев