Навигация
Метод ортогонализации в случае несимметрической матрицы
12543
знака
0
таблиц
5
изображений
1.2 Метод ортогонализации в случае несимметрической матрицы
В случае несимметрической матрицы процесс ортогонализации проводится точно также. Пусть векторы ![]() уже построены. Тогда
уже построены. Тогда ![]() ищется в виде
ищется в виде
![]() (29)
(29)
Коэффициенты ![]() определяются из системы
определяются из системы
![]() (30)
(30)
Система в случае несимметрической матрицы будет треугольной.
Аналогично строится система «биортогональных» векторов, т.е. система 2n векторов, удовлетворяющих условию (12). При этом ![]() – n произвольных линейно независимых векторов, а векторы
– n произвольных линейно независимых векторов, а векторы ![]() строятся последовательно в виде
строятся последовательно в виде
![]() (31)
(31)
Коэффициенты ![]() находятся из системы
находятся из системы
![]() (32)
(32)
Также поступаем, отыскивая коэффициенты ![]() и
и ![]() , при построении систем векторов (14) и (15), удовлетворяющих условиям (16).
, при построении систем векторов (14) и (15), удовлетворяющих условиям (16).
При этом получим две системы:
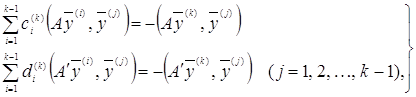 (33)
(33)
из которых и определяем ![]() и
и ![]() .
.
Остановимся еще на одном методе ортогонализации. Будем рассматривать строки матрицы А как векторы:
![]() (34)
(34)
Ортонормируем эту систему векторов. Первое уравнение системы ![]() делим на
делим на  . При этом получим
. При этом получим
![]() (35)
(35)
где
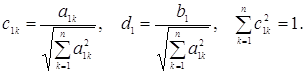 (36)
(36)
Второе уравнение системы заменится на
![]() (37)
(37)
где
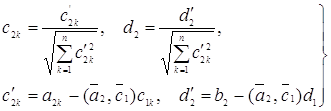 (38)
(38)
Аналогично поступаем дальше. Уравнение с номером i примет вид
![]() (39)
(39)
где

 (40)
(40)
Процесс будет осуществим, если система уравнений линейно независима. В результате мы придем к новой системе ![]() , где матрица С будет ортогональной, т.е. обладает свойством СС¢=I.
, где матрица С будет ортогональной, т.е. обладает свойством СС¢=I.
Таким образом, решение системы можно записать в виде
![]() . (41)
. (41)
Практически, вследствие ошибок округления, СС¢ будет отлична от единичной матрицы и может оказаться целесообразным произвести несколько итераций для системы ![]() .
.
2. Метод сопряженных градиентов
2.1 Первый алгоритм метода
Пусть требуется решить систему линейных алгебраических уравнений
![]() (1)
(1)
с положительно определенной матрицей A порядка n.
Рассмотрим функционал
![]() , (2)
, (2)
представляющий многочлен второго порядка относительно x1, x2, …, xn. Обозначим через ![]() решение системы (1), т.е.
решение системы (1), т.е. ![]() . В силу симметричности и положительной определенности матрицы, имеем:
. В силу симметричности и положительной определенности матрицы, имеем:

При этом знак равенства возможен лишь при ![]() . Таким образом, задача решения уравнения (1) сводится к задаче отыскания вектора
. Таким образом, задача решения уравнения (1) сводится к задаче отыскания вектора ![]() , обращающего в минимум функционал (2).
, обращающего в минимум функционал (2).
Для отыскания такого вектора применим следующий метод.
Пусть ![]() – произвольный начальный вектор, а
– произвольный начальный вектор, а
![]() (4)
(4)
– вектор невязок системы. Покажем, что вектор невязок ![]() имеет направление нормали к поверхности
имеет направление нормали к поверхности ![]() в точке
в точке ![]() . В самом деле, направление нормали совпадает с направлением быстрейшего изменения функции
. В самом деле, направление нормали совпадает с направлением быстрейшего изменения функции ![]() в точке
в точке ![]() . Это направление мы найдем, если найдем среди векторов
. Это направление мы найдем, если найдем среди векторов ![]() , для которых
, для которых ![]() , такой вектор, что
, такой вектор, что

имеет наибольшее значение. Но
Но среди векторов ![]() постоянный длины
постоянный длины ![]() достигает максимального значения, если
достигает максимального значения, если ![]() имеет направление вектора
имеет направление вектора ![]() или ему противоположное. Утверждение доказано. Будем двигаться из точки
или ему противоположное. Утверждение доказано. Будем двигаться из точки ![]() в направлении вектора
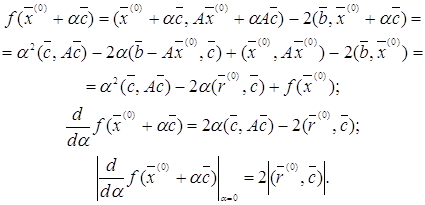
в направлении вектора ![]() до тех пор, пока функция
до тех пор, пока функция ![]() достигает минимального значения. Это будет при
достигает минимального значения. Это будет при ![]() , т.е. при
, т.е. при
 . (5)
. (5)
Вектор
![]() (6)
(6)
и принимаем за новое приближение к решению.
В методе сопряженных градиентов следующее приближение ![]() находится так. Через точку
находится так. Через точку ![]() проведем гиперплоскость (n-1) – го измерения
проведем гиперплоскость (n-1) – го измерения
![]() (7)
(7)
и через ![]() обозначим новую невязку системы
обозначим новую невязку системы
![]() . (8)
. (8)
Вектор ![]() направлен по нормали к поверхности
направлен по нормали к поверхности ![]() в точке
в точке ![]() , а вектор
, а вектор ![]() параллелен касательной плоскости в этой точке. Поэтому
параллелен касательной плоскости в этой точке. Поэтому
![]() . (9)
. (9)
Гиперплоскость (7) проходит через точку ![]() , так как
, так как
![]() .
.
При любом ![]() вектор
вектор ![]() параллелен некоторой нормальной плоскости к поверхности
параллелен некоторой нормальной плоскости к поверхности ![]() в точке
в точке ![]() . Найдем среди них тот, который лежит в гиперплоскости (7), т.е. ортогонален к
. Найдем среди них тот, который лежит в гиперплоскости (7), т.е. ортогонален к ![]() . Из условия ортогональности имеем:
. Из условия ортогональности имеем:
![]() ,
,
или
 . (10)
. (10)
Вектор
![]() (11)
(11)
имеет направление нормали к сечению поверхности ![]() гиперплоскости (7) в точке
гиперплоскости (7) в точке ![]() . Будем двигаться из точки
. Будем двигаться из точки ![]() в направлении вектора
в направлении вектора ![]() до тех пор, пока функция
до тех пор, пока функция ![]() достигнет минимума. Это будет при
достигнет минимума. Это будет при
 . (12)
. (12)
Вектор
![]()
примем за новое приближение к решению ![]() системы. Вектор невязок
системы. Вектор невязок
![]() (13)
(13)
имеет направление нормали к поверхности ![]() в точке
в точке ![]() . Покажем, что он будет ортогонален к
. Покажем, что он будет ортогонален к ![]() и
и ![]() . В самом деле, используя (9), (11), (12), (13), имеем:
. В самом деле, используя (9), (11), (12), (13), имеем:

Рассмотрим гиперплоскость (n-2) – х измерений
![]() , (14)
, (14)
проходящую через точку ![]() . Эта гиперплоскость содержит и
. Эта гиперплоскость содержит и ![]() , так как мы ранее видели, что
, так как мы ранее видели, что ![]() , а
, а
![]() .
.
Вектор ![]() при любом
при любом ![]() параллелен гиперплоскости (7), так как
параллелен гиперплоскости (7), так как
 .
.
Подберем ![]() так, чтобы он был параллелен и гиперплоскости (14), т.е. потребуем ортогональности к вектору
так, чтобы он был параллелен и гиперплоскости (14), т.е. потребуем ортогональности к вектору ![]() . Будем иметь:
. Будем иметь:
![]() ,
,
или
 (15)
(15)
Вектор
![]() (16)
(16)
будет иметь направление нормали к сечению поверхности ![]() гиперплоскостью (14) в точке
гиперплоскостью (14) в точке ![]() . Из точки
. Из точки ![]() сместимся в направлении этого вектора так, чтобы функция
сместимся в направлении этого вектора так, чтобы функция ![]() достигла минимального значения. Это будет при
достигла минимального значения. Это будет при
 , (17)
, (17)
![]() (18)
(18)
примем за новое приближение к ![]() . Новый вектор невязок будет:
. Новый вектор невязок будет:
![]() . (19)
. (19)
Продолжая процесс, получим последовательности векторов ![]() ,
, ![]() ,
, ![]() , определяемые рекуррентными соотношениями:
, определяемые рекуррентными соотношениями:
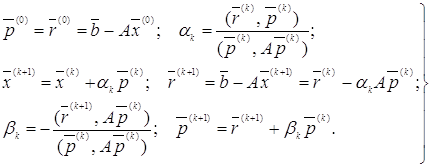 (20)
(20)
Для этих векторов имеют место следующие соотношения:
![]() (21)
(21)
![]() (22)
(22)
В самом деле, в силу самого построения при i¹j
![]()
Далее, при i>j
![]()
Если i=j+1, то правая часть равна нулю, в силу определения ![]() , если же i>j+1, то
, если же i>j+1, то ![]() , по доказанному, и
, по доказанному, и
![]() .
.
Продолжая понижение индекса у вектора ![]() , через несколько шагов придем к скалярному произведению
, через несколько шагов придем к скалярному произведению ![]() (по определению
(по определению ![]() ). Таким образом, соотношения (21) доказаны. Для доказательства (22), в силу равноправия индексов i и j, предположим, что i>j. Тогда
). Таким образом, соотношения (21) доказаны. Для доказательства (22), в силу равноправия индексов i и j, предположим, что i>j. Тогда
![]() .
.
Так как в n-мерном векторном пространства не может быть более n взаимно ортогональных векторов, то на некотором шаге ![]() получим
получим ![]() , т.е.
, т.е. ![]() будет решением системы (1).
будет решением системы (1).
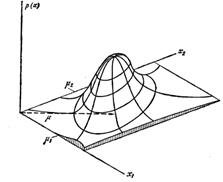
На рис. 1 показана геометрическая картина нашего построения при n=3.
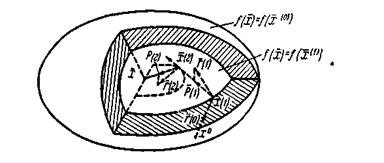
Рис. 1
Похожие работы
... мальне значення показникунадійності, при якому приймається рішення про орєінтованийзвязок назвем порогом показника надійності і позначимо (). Для можливості порівняння результатів у різних парах змінних в одній задачі системного синтезу корисно ввести відносний показник надійності. Відносним показником надійності ηij приняття рішення про напрям звязку між змінними xj → xi (стрілка в ...
0 комментариев