Навигация
3.1 Основные определения
До сих пор мы рассматриваем движение точки в одной, неподвижной системе отсчета. Однако, часто встречаются случаи, когда точка движется по определенному закону в некоторой системе отсчета, которая, в свою очередь, перемещается относительно неподвижной системы отсчета. Такое движение точки называется сложным. Введем основные определения сложного движения точки.
Движение точки в подвижной системе отсчета называется относительным. Скорость и ускорение точки в этом движении называются относительными и обозначаются: ![]() (или
(или ![]() ).
).
Движение точки вместе с подвижной системой называется переносным. Скорость и ускорение той точки М/ подвижной системы, в которой в данный момент находится движущаяся точка М, являются для данной точки переносной скоростью и переносным ускорением и обозначаются ![]() (или
(или ![]() ).
).
Движение точки относительно неподвижной системы отсчета называется абсолютным. Скорость и ускорение точки в этом движении называются абсолютными и обозначаются ![]() (или
(или ![]() ).
).
Пусть точка М движется в подвижной системе отсчета охуz. Ее координаты х, у, z являются функциями времени, а координаты х/, у/, z/ точки М/ подвижной системы, в которой в данный момент находится движущая точка М, являются константами. Но в любой момент времени
х = х/, у = у/, z = z/ (3.1)
Введем в рассмотрение радиусы-векторы, определяющие положение точек М и М/ в подвижной и неподвижной системах отсчета (рис. 3.1).
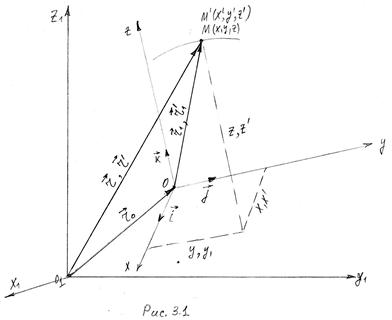
![]() - радиус-вектор, определяющий положение начала подвижной системы охуz в неподвижной системе отсчета о1х1у1z1.
- радиус-вектор, определяющий положение начала подвижной системы охуz в неподвижной системе отсчета о1х1у1z1.
![]() =
=![]() - радиус-вектор, определяющий положение движущейся точки М в подвижной системе отсчета. Он описывает относительное движение точки.
- радиус-вектор, определяющий положение движущейся точки М в подвижной системе отсчета. Он описывает относительное движение точки.
![]() - радиус-вектор, определяющий положение точки М/ подвижной системы в этой же системе.
- радиус-вектор, определяющий положение точки М/ подвижной системы в этой же системе.
![]() - радиус-вектор, определяющий положение точки М/ подвижной системы в неподвижной системе отсчета. Он описывает переносное движение точки.
- радиус-вектор, определяющий положение точки М/ подвижной системы в неподвижной системе отсчета. Он описывает переносное движение точки.
![]() - радиус-вектор, определяющий положение движущейся точки М в неподвижной системе отсчета. Он описывает абсолютное движение.
- радиус-вектор, определяющий положение движущейся точки М в неподвижной системе отсчета. Он описывает абсолютное движение.
3.2 Теоремы о схождении скоростей и ускорений
Скорости и ускорения точки в различных движениях будем определять как первую и вторую производные по времени от соответствующих радиусов-векторов.
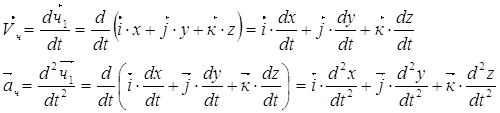
1. Относительную скорость и относительное ускорение находим как первую и вторую производные по времени от радиус-вектора ![]() , считая единичные орты
, считая единичные орты ![]() константами (в подвижной системе – они постоянны).
константами (в подвижной системе – они постоянны).
|
|
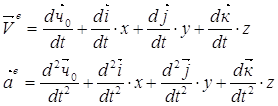
2. Переносную скорость и переносное ускорение находим как первую и вторую производные по времени от радиус-вектора ![]() , считая координаты х/, у/, z/ константами, а единичные орты – переменными.
, считая координаты х/, у/, z/ константами, а единичные орты – переменными.

так как дифференцирование проведено, то мы можем воспользоваться равенствами (3.1), т.е. заменить х/ на х, у/ на у, z/ на z:
|
|
3. Абсолютную скорость и абсолютное ускорение находим как первую и вторую производные по времени от радиус-вектора ![]() , считая все величины переменными:
, считая все величины переменными:
![]()
Таким образом доказана теорема сложения скоростей:
Абсолютная скорость равна геометрической сумме переносной и относительной скоростей.
![]() (3.6)
(3.6)
находим абсолютное ускорение:

где введено обозначение:
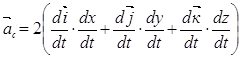 (3.7)
(3.7)
Величина ![]() , определяемая равенством (3.7) называется поворотным ускорением или ускорением Кориолиса, по имени французского ученого, доказавшего теорему сложения ускорений:
, определяемая равенством (3.7) называется поворотным ускорением или ускорением Кориолиса, по имени французского ученого, доказавшего теорему сложения ускорений:
Абсолютное ускорение точки равно геометрической сумме переносного, относительного и Кориолисов ускорений.
![]() (3.8)
(3.8)
Похожие работы
... геометрическую сумму путем сложения векторов). Решить полученную систему уравнений. Подставить в решение общего вида значения величин и произвести вычисления. На примерах решения типовых задач на относительность движения покажем применение данного способа решения. Задача № 1. Два поезда движутся равномерно друг за другом. Скорость первого 80 км/ч, а второго 60 км/ч. Какова скорость второго поезда ...
... при двух значениях частоты вынуждающего фактора, т.е. тогда когда собственная частота колебаний корпуса двигателя совпадет с частотой вращения кривошипа. ωo = ω ωo = 2ω Значит, критическими оборотами для двигателя будут две частоты, одна – равная частоте собственных колебаний корпуса, другая равная половине частоты собственных колебаний. Для наиболее ясной картины построим ...
... трех попыток, а затем - средний коэффициент КЗ 3 с Таблица 2. Количество испытуемых, участвовавших в эксперименте Испытуемые Классы 2-й 3-й 4-й 5-й 6-й 7-й Возраст, лет 7-8 8-9 9-10 10-11 11-12 12-13 Кинематика скоростного бега Мальчики 21/26 25/22 21/22 23/22 23/22 21/25 Девочки 26/24 22/24 21/22 20/22 20/22 22/16 Двигательная ...
... 630 м со скоростью 48,6 км/ч и электричка длиной 120 м со скоростью 102,6 км/ч. В течение какого времени электричка будет обгонять товарный поезд? Ф.1.14. По одному направлению из одной точки начали одновременно двигаться два тела: одно равномерно со скоростью 9,8 м/с, другое - равноускоренно без начальной скорости с ускорением 9,8 см/с2. Через какое время второе тело догонит первое? Ф.1.15. ...
0 комментариев