Навигация
Ускорение Кориолиса, его величина направление и физический смысл
26011
знаков
13
таблиц
22
изображения
3.3 Ускорение Кориолиса, его величина направление и физический смысл
Рассмотрим ускорение Кориолиса, определяемое равенством (3.7). Если подвижная система движется относительно неподвижной поступательно (т.е. переносное движение поступательное), то единичные орты будут постоянны и по модулю и по направлению и их производные по времени будут равны нулю, следовательно и ускорение Кориолиса равно нулю.
Теорема о сложении ускорений при поступательном переносном движении будет выражаться равенством:
![]()
![]() (3.9)
(3.9)
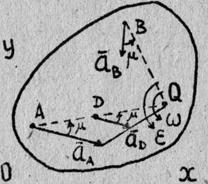
Рассмотрим переносное вращательное движение. Пусть подвижная система вращается вокруг оси О3 с угловой скоростью ![]() (рис. 3.2). единичные орты
(рис. 3.2). единичные орты ![]() можно рассматривать как радиус-векторы точек А, В и С соответственно. А производные по времени от радиус-векторов точек дают скорости точек.
можно рассматривать как радиус-векторы точек А, В и С соответственно. А производные по времени от радиус-векторов точек дают скорости точек.
|

Следовательно:
![]() ;
; ![]() ;
; ![]() (а)
(а)
с другой стороны, скорости точек А, В и С мы можем найти как во вращательном движении по формуле (2.11):
![]() ;
; ![]() ;
; ![]() (б)
(б)
сравнивая (а) и (б) находим, что:
 ;
;  ;
;  ; (в)
; (в)
Подставим эти значения в формулу (3.7)
Таким образом ускорение Кориолиса равно удвоенному векторному произведению вектора угловой скорости переносного движения на вектор относительной скорости.
![]() (3.10)
(3.10)
Его величина
![]() (3.11)
(3.11)
|
В соответствии с правилом векторного произведения ускорения Кориолиса направлено перпендикулярно плоскости, в которой лежат векторы ![]() и
и ![]() , в ту сторону, чтобы, глядя навстречу ему, мы видим поворот вектора
, в ту сторону, чтобы, глядя навстречу ему, мы видим поворот вектора ![]() к вектору
к вектору ![]() на меньший угол происходящим против часовой стрелки.
на меньший угол происходящим против часовой стрелки.
Другое правило: чтобы найти направление ускорения Кориолиса, надо вектор ![]() спроецировать на плоскость, перпендикулярно оси переносного вращения, и полученную проекцию повернуть на 90о в сторону вращения. Эти и будет направление вектора
спроецировать на плоскость, перпендикулярно оси переносного вращения, и полученную проекцию повернуть на 90о в сторону вращения. Эти и будет направление вектора ![]() .
.
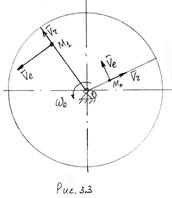
Физический смысл ускорения Кориолиса выясним на таком примере. Пусть круглая платформа вращается с постоянной угловой скоростью ![]() , а по радиусу платформы двигается точка М с постоянной относительной скоростью Vч(рис. 3.3). В некоторый момент точка занимает положение Мо,а через промежуток времени
, а по радиусу платформы двигается точка М с постоянной относительной скоростью Vч(рис. 3.3). В некоторый момент точка занимает положение Мо,а через промежуток времени ![]() положение М1. При этом произошло изменение относительной скорости за счет переносного движения (изменилось направление вектора
положение М1. При этом произошло изменение относительной скорости за счет переносного движения (изменилось направление вектора ![]() ) и изменение переносной скорости за счет относительного движения (изменилась величина
) и изменение переносной скорости за счет относительного движения (изменилась величина ![]() в результате удаления точки от оси вращения). Эти два изменения и характеризуются ускорением Кориолиса.
в результате удаления точки от оси вращения). Эти два изменения и характеризуются ускорением Кориолиса.
Таким образом, ускорение Кориолиса характеризует изменение относительной скорости в результате переносного движения и изменение переносной скорости в результате относительного движения.
В общем случае движения формулы (3.8) удобнее использовать в таком виде:
![]() (3.12)
(3.12)
Задача кинематики плоского движения твердого тела - найти характеристики движения самого тела и отдельных его точек. В данном задании к таким характеристикам относятся векторы угловой скорости и углового ускорения тела.
![]() Рис. 1
Рис. 1
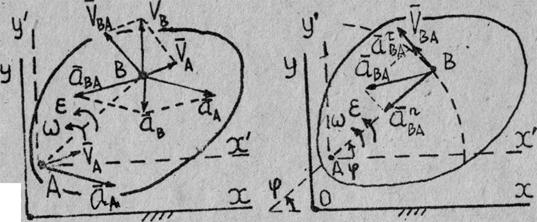
Основные формулы кинематики плоского движения твердого тела - векторные формулы, связывающие соответственно скорости и ускорения двух произвольных точек плоской фигуры, например, точек А и В (рис. 1)
![]() B =
B = ![]() A +
A + ![]() BA =
BA = ![]() A +
A + ![]() ´
´ ![]() ; (1)
; (1)
![]() B =
B = ![]() A +
A + ![]() +
+ ![]() =
= ![]() A +
A + ![]() × (
× (![]() ´
´ ![]() ) +
) + ![]() ×
× ![]() ; (2)
; (2)
где ![]() ,
, ![]() , - векторы угловой скорости и углового ускорения вращения плоской фигуры вокруг любой оси, например Az' перпендикулярной плоскости движения Oxy относительно системы координат Ax'y'z', оси которой параллельны осям неподвижной системы координат Оxyz.На рис.1 оси Оz. и Аz' не изображены, так как считается, что они перпендикулярны к плоскости рисунка и направлены на наблюдателя, а плоскости Охy и Аx'y' совпадают с плоскостью рисунка.
, - векторы угловой скорости и углового ускорения вращения плоской фигуры вокруг любой оси, например Az' перпендикулярной плоскости движения Oxy относительно системы координат Ax'y'z', оси которой параллельны осям неподвижной системы координат Оxyz.На рис.1 оси Оz. и Аz' не изображены, так как считается, что они перпендикулярны к плоскости рисунка и направлены на наблюдателя, а плоскости Охy и Аx'y' совпадают с плоскостью рисунка.
Левые части выражений
![]() BA =
BA = ![]() ´
´ ![]() ;
; ![]() =
= ![]() × (
× (![]() ´
´ ![]() ) =
) = ![]() ×
× ![]() BA;
BA; ![]() =
= ![]() ×
× ![]() ;
;
являются соответственно векторами скорости, нормального и касательного ускорения точки В относительно системы координат Ax'y'z' при вращении отрезка АВ в плоскости рисунка вокруг точки A, называемой в таком случае полюсом, с угловой скоростью ![]() и угловым ускорением
и угловым ускорением ![]() . Индексы n и t, в выражениях
. Индексы n и t, в выражениях ![]() и
и ![]() указывают, что эти векторы направлены соответственно по внутренней нормали и касательной в точке B к окружности радиуса r = AB с центром в точке А. Модули упомянутых векторов
указывают, что эти векторы направлены соответственно по внутренней нормали и касательной в точке B к окружности радиуса r = AB с центром в точке А. Модули упомянутых векторов ![]()
![]() находятся по формулам
находятся по формулам
½![]() BA½ =
BA½ = ![]() ´ AB; ½
´ AB; ½![]() ½ =
½ = ![]() =
= ![]() ´ AB; ½
´ AB; ½![]() ½ =
½ = ![]() ´ AB; (3)
´ AB; (3)
Векторы ![]() BA,
BA, ![]() ,
, ![]() лежат в плоскости движения плоской фигуры тела, причем ненулевые векторы
лежат в плоскости движения плоской фигуры тела, причем ненулевые векторы ![]() BA,
BA, ![]() перпендикулярны отрезку AB, а ненулевой вектор
перпендикулярны отрезку AB, а ненулевой вектор ![]() направлен от точки В к точке А . Таким образом, для этих векторов всегда известны линии действия.
направлен от точки В к точке А . Таким образом, для этих векторов всегда известны линии действия.
Поскольку модуль ускорения ![]() может быть вычислен по формуле (3) через угловую скорость тела
может быть вычислен по формуле (3) через угловую скорость тела ![]() , обычно известную к этапу нахождения ускорений, целесообразно в формуле (2) вектор
, обычно известную к этапу нахождения ускорений, целесообразно в формуле (2) вектор ![]() записывать вслед за известным вектором
записывать вслед за известным вектором ![]() А, т.е. перед вектором
А, т.е. перед вектором ![]() .
.
Векторы ![]() и
и ![]() параллельны оси Оz и поэтому полностью определяются своими проекциями на эту ось
параллельны оси Оz и поэтому полностью определяются своими проекциями на эту ось
Модуль проекции равен модулю вектора ![]() ;
; ![]() , а знак проекции указывает на направление вектора. Например, если проекции векторов положительны (
, а знак проекции указывает на направление вектора. Например, если проекции векторов положительны (![]() , то векторы
, то векторы ![]() направлены так же, как и
направлены так же, как и ![]() , или ось Oz. Таким образом, при плоском движении тела задача нахождения векторов
, или ось Oz. Таким образом, при плоском движении тела задача нахождения векторов ![]() сводится к задаче отыскания их проекций на ось Oz или Az'.
сводится к задаче отыскания их проекций на ось Oz или Az'.
Если ![]() (рад) - угол между осью Ax' (Ох) и вектором
(рад) - угол между осью Ax' (Ох) и вектором ![]() (рис. 1) и за положительное направление отсчета угла
(рис. 1) и за положительное направление отсчета угла ![]() для выбранной системы координат принято направление против хода часовой стрелки, то
для выбранной системы координат принято направление против хода часовой стрелки, то
![]()
![]() рад/с;
рад/с; ![]() =
= ![]()
![]() =
= ![]()
![]() рад/с. (4)
рад/с. (4)
О направлении векторов ![]() и
и ![]() судят по круговым стрелкам
судят по круговым стрелкам ![]() и
и ![]() согласно правилу: "круговая стрелка, направленная против хода стрелки часов, соответствует вектору, направленному так же, как ось Oz".
согласно правилу: "круговая стрелка, направленная против хода стрелки часов, соответствует вектору, направленному так же, как ось Oz".
Из формул, использующих понятие МЦС (точка Р) на рис.2,
![]() ´
´ ![]() ;
; ![]() B =
B = ![]() ;
; ![]() ;
;
![]() ;
; ![]() , (5)
, (5)
следует, что в данный момент времени распределение скоростей точек тела при плоском движении таково, как если бы тело вращалось вокруг оси Рz с угловой скоростью ![]() .
.
|
|
![]()
![]()
![]() Если отсчитывать угол 90 от направления вектора скорости точки
Если отсчитывать угол 90 от направления вектора скорости точки ![]() A к направлению АР от этой точки до МЦС, то направление отсчета угла совпадает с направлением круговой стрелки
A к направлению АР от этой точки до МЦС, то направление отсчета угла совпадает с направлением круговой стрелки ![]() . Этот факт можно использовать для определения направления вектора
. Этот факт можно использовать для определения направления вектора ![]() .
.
Из формул, использующих понятие МЦУ (точка Q на рис. 3),
![]()
![]() ;
; ![]()
![]() ; (6)
; (6)
![]() ,
,
следует, что в данный момент времени распределение ускорений точек тела при плоском движении таково, как если бы тело вращалось вокруг оси Qz с угловой скоростью ![]() и угловым ускорением
и угловым ускорением ![]() .
.
Угол ![]() отсчитывается от вектора ускорения какой-либо точки в направлении круговой стрелки
отсчитывается от вектора ускорения какой-либо точки в направлении круговой стрелки ![]() . При отыскании положения МЦУ по ускорениям двух точек, например по
. При отыскании положения МЦУ по ускорениям двух точек, например по ![]() и
и ![]() , под углом
, под углом ![]() к соответствующим ускорениям проводят лучи AQ и BQ. Точка пересечения лучей (точка Q) является МЦУ плоской фигуры в данный момент времени.
к соответствующим ускорениям проводят лучи AQ и BQ. Точка пересечения лучей (точка Q) является МЦУ плоской фигуры в данный момент времени.
Направления векторов ![]() и
и ![]() помимо формул (4) могут быть найдены из отдельных векторных формул
помимо формул (4) могут быть найдены из отдельных векторных формул
![]() ;
; ![]() ;
; ![]() . (7)
. (7)
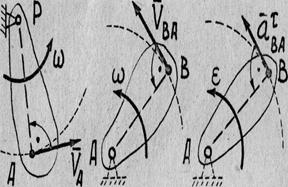
Рис. 4
Чтобы избежать анализа расположения трех взаимно перпендикулярных векторов формул (7) при известных ![]() ,
, ![]() ,
, ![]() направления
направления ![]() и
и ![]() находят аналогично случаю вращательного движения тела вокруг неподвижной оси (рис. 4).
находят аналогично случаю вращательного движения тела вокруг неподвижной оси (рис. 4).
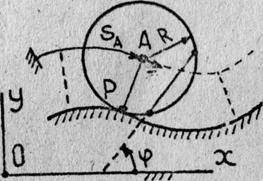
Рис. 5![]()
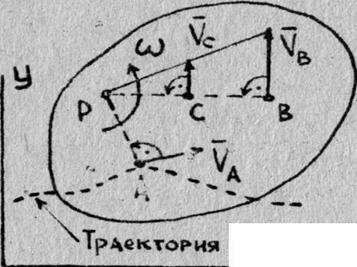
Кинематика плоского движения
катка радиуса R. при отсутствии скольжения по направляющей (в общем случае криволинейной), имеет некоторые особенности вследствие того, что мгновенный центр скоростей катка (точка Р ) совпадает с точкой окружности касающейся направляющей (рис. 5). Поэтому при движении катка расстояние от его центра (точки А) до МЦС является неизменным во времени и равным R.
AP(t) = const = R (8)
Свойство неизменности расстояния АР позволяет установить дополнительные соотношения, удобные для расчетов кинематических характеристик катка. Представим вектор скорости точки А с помощью:
а) формулы естественного способа задания движения точки
![]() , где
, где ![]() - единичный вектор естественного трехгранника, касательный в точке A к кривой ее движения; SA - криволинейная координата точки;
- единичный вектор естественного трехгранника, касательный в точке A к кривой ее движения; SA - криволинейная координата точки;
б) формулы (7) плоского движения тела
![]() ,
,
![]() ;
;
![]() - орт оси Оz, перпендикулярной плоскости движения катка Qxy; j - угол, задающий направление какого-либо отрезка плоской фигуры катка. Ввиду произвольности выбора такого отрезка, обычно собственно отрезок, не указывают на рисунках, а изображают лишь круговую стрелку положительного направления отсчета угла j, называя его углом поворота катка.
- орт оси Оz, перпендикулярной плоскости движения катка Qxy; j - угол, задающий направление какого-либо отрезка плоской фигуры катка. Ввиду произвольности выбора такого отрезка, обычно собственно отрезок, не указывают на рисунках, а изображают лишь круговую стрелку положительного направления отсчета угла j, называя его углом поворота катка.
![]() .
.
Поскольку вектoр ![]() коллинеарен результату векторного произведения
коллинеарен результату векторного произведения
![]() (
(![]() ^
^![]() ,
, ![]() ^
^![]() ), то
), то
![]() .
.
Откуда, используя свойство (8), получим формулы
![]() , или
, или ![]() , (9)
, (9)
справедливые для любого момента времени t.
В правой части формулы (9) берется знак "+", если при мысленном увеличении угла поворота катка j в направлении против хода стрелки часов наблюдается возрастание координаты SА центра движущегося катка в положительном направлении ее отсчета, иначе берется знак "-".
Так, например, для случая отсчетов SА и j, изображенном на рис.5, в формуле (9) необходимо брать знак "-".
Дифференцируя и интегрируя по времени соотношения (9), придем к выражениям
![]() , или
, или ![]() , (10),
, (10),
а также ![]() ,
,
где С - некоторая константа, значение которой зависит от выбора начал отсчетов SА и j. Обычно принимают С=0, так как считают, что когда SА=0, j также равно нулю. Из произведения соответствующих частей формул (9), (10),
![]() (11)
(11)
![]()
![]()
![]()
![]()
![]()
![]() следует, что если векторы
следует, что если векторы ![]() ,
, ![]() сонаправлены, то сонаправлены и векторы
сонаправлены, то сонаправлены и векторы ![]() ,
, ![]() .
.
Таким образом, с помощью формул (1-4), (8-9) могут быть найдены характеристики векторов скоростей и ускорений точек, векторов угловых скоростей и ускорений звеньев механизма, а с помощью формул (5, 6), (11) осуществлена их проверка.
Нахождение кинематических характеристик движения (![]() ,
, ![]() ,
, ![]() ,
, ![]() ) при помощи векторных формул (1), (2) рекомендуется проводить следующим образом:
) при помощи векторных формул (1), (2) рекомендуется проводить следующим образом:
1) написать формулу (1) или (2) применительно к конкретным точкам рассматриваемого звена механизма. При этом в качестве полюса следует взять точку с известными кинематическими характеристиками движения;
2) установить, известны или неизвестны на данном этапе решения две независимые характеристики {проекции на две оси или модуль и направляющий угол) для каждого вектора, входящего в уравнение (1) или (2). Найти значения тех независимых характеристик векторов, которые могут быть установлены из условий движения звена без решения рассматриваемого векторного уравнения;
3) решить векторное уравнение графоаналитическим или аналитическим методом (метод проекций).
Похожие работы
... геометрическую сумму путем сложения векторов). Решить полученную систему уравнений. Подставить в решение общего вида значения величин и произвести вычисления. На примерах решения типовых задач на относительность движения покажем применение данного способа решения. Задача № 1. Два поезда движутся равномерно друг за другом. Скорость первого 80 км/ч, а второго 60 км/ч. Какова скорость второго поезда ...
... при двух значениях частоты вынуждающего фактора, т.е. тогда когда собственная частота колебаний корпуса двигателя совпадет с частотой вращения кривошипа. ωo = ω ωo = 2ω Значит, критическими оборотами для двигателя будут две частоты, одна – равная частоте собственных колебаний корпуса, другая равная половине частоты собственных колебаний. Для наиболее ясной картины построим ...
... трех попыток, а затем - средний коэффициент КЗ 3 с Таблица 2. Количество испытуемых, участвовавших в эксперименте Испытуемые Классы 2-й 3-й 4-й 5-й 6-й 7-й Возраст, лет 7-8 8-9 9-10 10-11 11-12 12-13 Кинематика скоростного бега Мальчики 21/26 25/22 21/22 23/22 23/22 21/25 Девочки 26/24 22/24 21/22 20/22 20/22 22/16 Двигательная ...
... 630 м со скоростью 48,6 км/ч и электричка длиной 120 м со скоростью 102,6 км/ч. В течение какого времени электричка будет обгонять товарный поезд? Ф.1.14. По одному направлению из одной точки начали одновременно двигаться два тела: одно равномерно со скоростью 9,8 м/с, другое - равноускоренно без начальной скорости с ускорением 9,8 см/с2. Через какое время второе тело догонит первое? Ф.1.15. ...
0 комментариев