Навигация
Построение корреляционной функции для фрагмента сигнала длительностью 2000 отсчетов
51332
знака
0
таблиц
29
изображений
1.7 Построение корреляционной функции для фрагмента сигнала длительностью 2000 отсчетов
Для построения корреляционной функции двух сигналов, выберем фрагменты сигналов:
Практическая часть
%Начало фрагмента задается величиной N1
N1=25001;
% конец фрагмента задается величиной N2
N2=26000;
x=tr_t200 (N1:N2); %вырезали фрагмент сигнала
r=xcorr (x, x); %Вычисление корреляционной функции
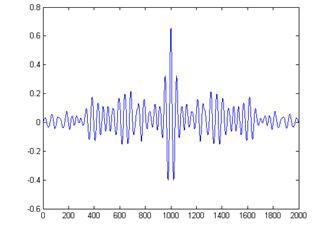
Рисунок 13 – График исходного сигнала гусеничной техники
Для сигнала гусеничной техники выбираем наиболее информативный участок от 54000 до 55000.
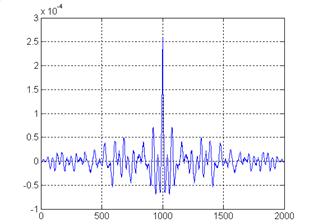
Рисунок 14 – График исходного фонового сигнала
Для фонового сигнала выбираем наиболее информативный участок то 45000 до 46000.
Для сигнала гусеничной техники:
h1=tr_t200 (54000:55000);% вырезали фрагмент
k=1000;
KF=xcorr (h1, h1, k);% КФ
k1=-k:k; plot (k1, KF);%построили КФ
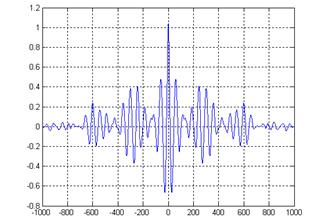
Рисунок 15 – График корреляционной функции сигнала гусеничной техники
Вывод: График имеет квазипериодический характер. Повтор явных всплесков колебаний через каждые 250÷300 отсчетов. По корреляционной функции также можно сказать, что сигнал имеет колебательный случайный характер. Так же можно сказать, что функция не стационарна, так как дисперсия ее не постоянна. Период колебания корреляционной функции сигнала гусеничной техники составляет примерно 290 отсчетов (0.58 с).
Для фонового сигнала:
h2=fon (15000:16000);% вырезали фрагмент
k=1000;
KF=xcorr (h2, h2, k);% КФ
k1=-k:k; plot (k1, KF);%построили КФ
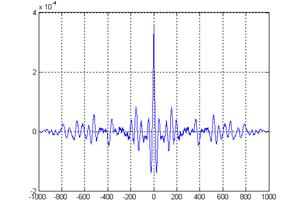
Рисунок 16 – График корреляционной функции фонового сигнала
Вывод: по корреляционной функции для фонового сигнала можно сказать, что сигнал имеет колебательный случайный характер. Так же можно сказать, что функция не стационарна, так как дисперсия ее не постоянна. Период колебания корреляционной функции фонового сигнала составляет приблизительно 190 отсчетов.
2. Формирование обучающих и контрольных множеств данных
2.1 Признаки по оценке спектра мощности сигнала в восьми интервалах частот
Теоретический раздел
При обнаружении и распознавании объектов по сейсмическим сигналам возникает задача выбора признаков.
Признаки должны удовлетворять двум основным требованиям:
1 Устойчивость. Наиболее устойчивыми считаются признаки, отвечающие нормальному закону распределения (желательно, чтобы значения признаков не выходили за пределы поля допуска);
2 Сепарабельность. Чем больше расстояние между центрами классов и меньше дисперсия в классе, тем выше показатели качества системы обнаружения или классификации.
В данной работе признаками являются: распределение мощности в десяти равномерных интервалах (по 25 гармоник).
Практическая часть
x1=tr_t200-mean (tr_t200);%Введение центрированного сигнала одного
человека.
x2=fon-mean(fon);%Введение центрированного сигнала
группы людей.
Признаки вычисляются с использованием подгружаемого файла MATRPRIZP:
function [P, Ps]=f (x, fs, N1, N2)
% Программа вычисления матрицы признаков относительной мощности
% сигнала в 10-ти поддиапазонах частот
% Обращение к процедуре: P=MATRPRIZP (x, fs, N1, N2); или [P, Ps]=MATRPRIZP (x, fs, N1, N2);
% x – исходный дискретный сигнал
% P – матрица признаков
% Ps – матрица сглаженных признаков
% Pk – спектр мощность сигнала в текущем окне
% N1 – длинна нарезанных сигналов в отсчетах
% N2 – сдвиг в отсчетах между соседними сигналами
% M – матрица сигналов размерности N1*N2
% Nc – число строк матрицы сигналов
M=matrsig (x, N1, N2);
Nc=length (M(:, 1));
for i=1: Nc Pk(:, i)=SM (M(i,:)', N1, fs); end;
Pk=Pk';
for i=1: Nc
w=sum (Pk(i,:));
P (i, 1)=sum (Pk(i, 1:51))/w; P (i, 2)=sum (Pk(i, 52:103))/w; P (i, 3)=sum (Pk(i, 104:155))/w; P (i, 4)=sum (Pk(i, 156:207))/w;…
P (i, 5)=sum (Pk(i, 208:259))/w; P (i, 6)=sum (Pk(i, 260:311))/w; P (i, 7)=sum (Pk(i, 312:363))/w; P (i, 8)=sum (Pk(i, 364:415))/w; P (i, 9)=sum (Pk(i, 416:467))/w; P (i, 10)=sum (Pk(i, 468:512))/w;
end;
Пропускаем сигналы через формирование матрицы признаков:
x=tr_t200;
N1=1024;
N2=512;
fs=500;
Mt=MATRPRIZP (x, fs, N1, N2);
x=fon;
N1=1024;
N2=512;
fs=500;
Mf=MATRPRIZP (x, fs, N1, N2);
Получим графические представления матриц признаков:
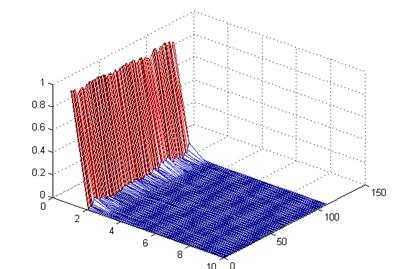
Рисунок 17 – Графическое представление матрицы признаков сигнала гусеничной техники
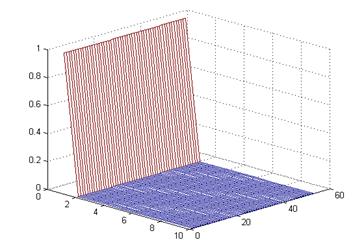
Рисунок18 – Графическое представление матрицы признаков фонового сигнала
3 Исследование признаков
Практическая часть
Для обучающей матрицы произвести исследование признаков по следующей программе: 1) Оценить параметры распределения признаков; 2) По каждому признаку обучающей матрицы вычислить расстояние. Для данного признака сформулировать решающее правило задачи обнаружения.
3.1 Оценка параметров распределения признаков. Определение информативного признака с максимальным расстоянием, построение функций плотности распределения вероятностей и вычисление порога принятия решения, формулирование решающего правила
Загружаем сигнал в рабочее пространство:
h1=fon-mean(fon);
h2=tr_t200-mean (tr_t200);
N1=1024;
N2=512;
fs=500;
Пропускаем сигнал через решетку фильтров Батерворда:
[M, Mf]=MATRPRIZP (h1,500, N1, N2);
[M, Mt]=MATRPRIZP (h2,500, N1, N2);
Находим математическое ожидание и дисперсию для 2-х сигналов:
VMf=mean(Mf);
VMf =
0.7424 0.0651 0.0439 0.0353 0.0353 0.0289 0.0200 0.0135 0.0093 0.0054
VMs=mean(Mt);
VMs =
0.9563 0.0424 0.0006 0.0002 0.0001 0.0001 0.0001 0.0001 0.0001 0.0001
VSf=std(Mf);
VSf =
0.0676 0.0144 0.0119 0.0103 0.0131 0.0107 0.0056 0.0030 0.0018 0.0016
VSs=std(Mt);
VSs =
0.0234 0.0232 0.0003 0.0001 0.0001 0.0001 0.0001 0.0000 0.0000 0.0000
npr=10;
for i=1:npr
r(i)=abs (VMf(i) – VMs(i))/(VSf(i)+VSs(i));
end;
[max_r, ind]=max(r);
Расстояние между признаками r=
2.3638 0.67807 3.5322 3.2243 2.3307 2.9455 4.0058 4.756 4.3383 3.2031
Максимальное расстояние: max_r= 4.756;
Получили наиболее информативный признак под номером 8. Следовательно, нормированное значение мощности в диапазоне 364 – 415 Гц.
ind=8;
x1=Mt(:, ind);
x1=sort(x1);
n1=length(x1);
xmin1=x1 (1);
xmax1=x1 (n1);
Mx1=mean(x1);
Sx1=std(x1);
xl1=Mx1–3*Sx1;
xr1=Mx1+3*Sx1;
xft1=linspace (xl1, xr1,1000);
ft1=[normpdf (xft1, Mx1, Sx1)];
k1=round (n1^0.5);
d1=(xmax1-xmin1)/k1;
x2=Mf(:, ind);
x2=sort(x2);
n2=length(x2);
xmin2=x2 (1);
xmax2=x2 (n2);
Mx2=mean(x2);
Sx2=std(x2);
xl2=Mx2–3*Sx2;
xr2=Mx2+3*Sx2;
xft2=linspace (xl2, xr2,1000);
ft2=[normpdf (xft2, Mx2, Sx2)];
k2=round (n2^0.5);
d2=(xmax2-xmin2)/k2;
plot (xft1, ft1.*d1,'b', xft2, ft2.*d2,'r');
chi=(2*Sx1*Sx2*log (Sx2/Sx1))+Mx1^2-Mx2^2;
Zn=2*(Mx1-Mx2);
h=chi/Zn
Получили порог принятия решения:
h = 0.0063
Построим график плотности распределения вероятности:
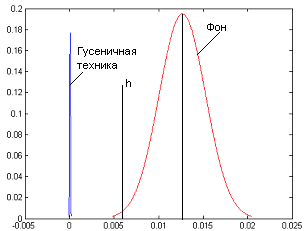
Рисунок 19 – Совмещенные графики плотностей распределения вероятностей сигналов гусеничной техники и фона
Решающее правило: если значения признака будет меньше порога h, то принимаем решение, что это полезный сигнал, если же значения признака больше порога h это будет соответствовать отсутствию сигнала (фону).
Вывод: в данной части курсовой работы были получены матрицы признаков сигнала гусеничной техники и фонового сигналов. Были найдены значение и номер наиболее информативного признака. Но по этому признаку нельзя построить систему классификации, т. к. будет слишком велика ошибка. Поэтому систему классификации целесообразно строить по нескольким признакам.
Также было получено значение порога принятия решения для системы классификации и сформулировано решающее правило.
Похожие работы
... установкой антивирусных средств на рабочие станции пользователей. Это сложная задача, требующая комплексного подхода к решению. Одно из главных преимуществ данного решения - рассмотрение подсистемы защиты информации от вредоносных программ как многоуровневой системы. Первый уровень включает в себя средства защиты от вредоносных программ, устанавливаемые на стыке с глобальными сетями (Интернет ...
... заболевания в результате паралича дыхания. 4. Зажигательное оружие Важное место в системе обычных вооружений принадлежит зажигательному оружию, которое представляет собой комплекс средств поражения , основан- ных на использовании зажигательных веществ. По американской классификации, зажигательное оружие относится к оружию массового поражения. Учитывается также способность зажигательного ...
... . 5. Получены длительные непрерывные ряды наблюдений интенсивности потока и азимутальных распределений СДВ атмосфериков, которые позволили проследить динамику грозовой активности в мировых грозовых центрах. 5.1. Морской мониторинг показал, что основной вклад в мировую грозовую активность дают континентальные и островные грозовые центры. Вариации интенсивности потока импульсов хорошо ...


... сигнал на когерентность, исключает случайные, побочные результаты измерений без потери чувствительности частотомера. Анализаторы спектра Этот уже достаточно развитый, но еще перспективный вид средств радиоконтроля предназначен для сканирования частотных спектров модулированных сигналов в различных частотных диапазонах и отображения на экране дисплея/осциллографа этих спектров. В случае, ...
0 комментариев